

4.8. Особенности процесса торможения автопоезда
Как известно, автопоезд состоит из тягового автомобиля (тягача) и прицепов или полуприцепов. Поэтому автопоезда можно разделить на три основные группы:
- тяговый автомобиль с прицепом;
- седельный тягач с полуприцепом;
- тяговый автомобиль с прицепом роспуском.
Торможение автопоезда можно рассматривать как торможение отдельных звеньев, соединенных шарнирно между собой и получающих собственные замедления.
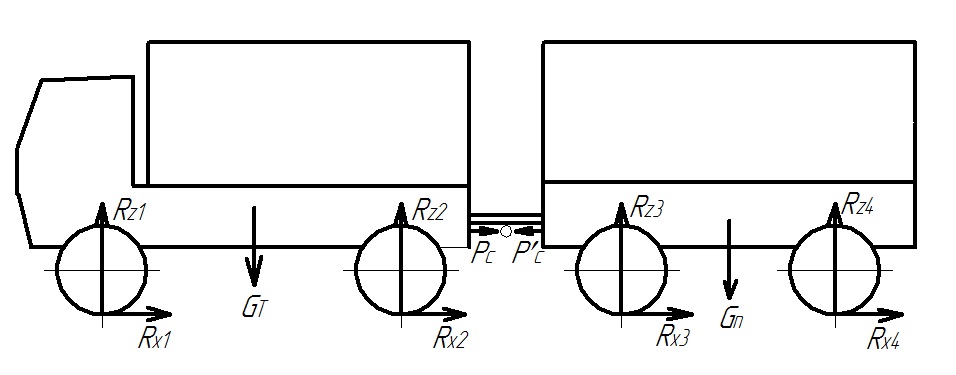
Рис. 4.5. Схема сил, действующих на автопоезд при торможении
На горизонтальном участке дороги
Составим уравнения баланса сил торможения на горизонтальной дороге для тягача и прицепа автопоезда, допуская, что Рв = 0 (рис. 4.5):
для автомобиля-тягача
![]() ;
(4.44)
;
(4.44)
для прицепа -
![]() ,
(4.45)
,
(4.45)
где Рс – сила связи при торможении между звеньями автопоезда.
Из
выражений (4.44) и (4.45) без учета
![]() находим:
находим:
![]() ;
;
(4.46)
![]() ,
,
где
![]() - удельная тормозная сила тягача и
прицепа соответственно (
- удельная тормозная сила тягача и
прицепа соответственно (![]() ).
).
Если считать, что сцепное устройство жесткое и не имеет зазоров, то можно принять, что интенсивность замедления звеньев автопоезда мало отличается. Тогда из формулы (4.46) находим
![]() ,
(4.47)
,
(4.47)
где
![]() - приведенная сила тяжести автопоезда.
- приведенная сила тяжести автопоезда.
В
соответствии с формулой (4.47) взаимодействие
автомобиля-тягача и прицепа в процессе
торможения зависит от соотношения
удельных тормозных сил
![]() .
Возможны три случая соотношения.
.
Возможны три случая соотношения.
1.
Если
![]() ,
то Рс
= 0, - торможение автомобиля-тягача и
прицепа синхронное. Этот вариант
идеальный, но практически в тормозных
системах с пневматическим приводом
достигнуть не удается.
,
то Рс
= 0, - торможение автомобиля-тягача и
прицепа синхронное. Этот вариант
идеальный, но практически в тормозных
системах с пневматическим приводом
достигнуть не удается.
2.
Если
![]() ,
то Рс
> 0, т.е. прицеп притормаживает
автомобиль-тягач. Это приводит к растяжке
автопоезда. Но в этом случае возможна
блокировка колес прицепа, что повышает
вероятность заноса (сползания) прицепа.
,
то Рс
> 0, т.е. прицеп притормаживает
автомобиль-тягач. Это приводит к растяжке
автопоезда. Но в этом случае возможна
блокировка колес прицепа, что повышает
вероятность заноса (сползания) прицепа.
3.
Если
![]() ,
то Рс
< 0 и при торможении автопоезда прицеп
накатывается на автомобиль-тягач, что
приводит к потере устойчивости в виде
так называемого складывания автопоезда.
,
то Рс
< 0 и при торможении автопоезда прицеп
накатывается на автомобиль-тягач, что
приводит к потере устойчивости в виде
так называемого складывания автопоезда.
Для обеспечения эффективного торможения и сохранения устойчивости разрабатывают различные варианты управления тормозной системой автопоезда, например, устанавливают АВS.
4.9. Торможение на мокрых и скользких дорогах
На мокрых дорогах в зависимости от толщины влаги и наличия грязи коэффициент сцепления снижается на 20 – 50 % по сравнению с сухой дорогой. Если коэффициент сцепления шины с дорогой при небольших скоростях меньше 0,3 – 0,35, то такую дорогу следует считать скользкой.
При торможении на скользкой дороге водитель нажимает на педаль тормоза плавно, не выключая сцепление, чтобы избежать блокировки колес и уменьшить вероятность заноса автомобиля. При отпускании педали дросселя обороты коленчатого вала в случае выключения сцепления снижаются до оборотов холостого хода. Если сцепление не выключено, ведущие колеса через трансмиссию принудительно вращают коленчатый вал со скоростью, пропорциональной угловой скорости колес. Этим снижают скорость автомобиля.
Наиболее эффективно на мокрой и скользкой дороге совместное торможение автомобиля рабочими тормозами и двигателем, т.к. торможение осуществляется за счет действия тормозных механизмов и сопротивления в двигателе с трансмиссией. Однако маховик двигателя, замедляя свое вращение, отдает накопленную кинетическую энергию трансмиссии, которая вращает ведущие колеса. Это препятствует снижению скорости автомобиля.
Торможение
автомобиля с участием двигателя более
эффективно, чем торможение одними
тормозами в том случае, когда величина
замедления АТС при совместном торможении
с двигателем
![]() больше величины замедления
больше величины замедления
![]() при
торможении одними тормозами, т.е.
>
.
при
торможении одними тормозами, т.е.
>
.
Из формулы (4.11) получим
![]() ;
(4.48)
;
(4.48)
![]() ,
(4.49)
,
(4.49)
где - коэффициент учета вращающихся масс при включенном сцеплении –
![]() ;
(4.50)
;
(4.50)
![]() -
то же при выключенном сцеплении или при
движении накатом –
-
то же при выключенном сцеплении или при
движении накатом –
![]() .
(4.51)
.
(4.51)
В выражениях (4.48) – (4.51) G – фактический вес автомобиля (сила тяжести), Gп - его полный вес.
Из формул (4.48) и (4.49) следует, что торможение совместно с двигателем эффективно, если выполняется неравенство:
![]()
![]() .
(4.52)
.
(4.52)
Решая неравенство (4.52) относительно Рдв, имеем
![]() (4.53)
(4.53)
Обозначим
сумму всех сил
![]() ,
тогда (4.53) примет следующий вид:
,
тогда (4.53) примет следующий вид:
![]() (4.54)
(4.54)
Представим правую часть выражения (4.54) графически в зависимости от скорости автомобиля и интенсивности торможения (рис. 4.6). При одинаковых дорожных условиях, т. е, когда сила сопротивления дороги Рд = G(f cosα ± sinα) = const, зависимость тормозной силы Рдв от скорости автомобиля имеет линейный характер (рис. 4.6).
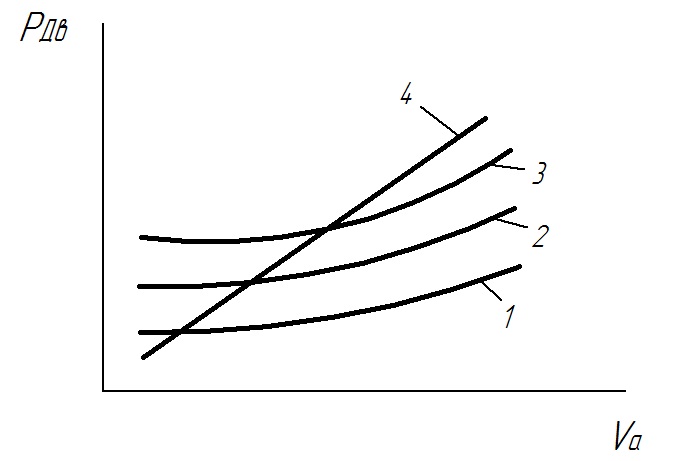
Рис. 4.6. Зависимость Рдв от скорости автомобиля перед торможением