

Передач
Примерные значения максимальных ускорений автомобилей с номинальной нагрузкой на различных передачах (в м/с2):
Передача …………………Первая Высшая
Легковые автомобили………..2,5…3,5 0,8….1,2
Грузовые автомобили………..1,7…2,0 0,15…0,5
Автобусы …………………….1,8….2,3 0,4 ….0,8
Автопоезда……………………1,0… 1,2 0,1… .0,5
Сравнивая графики ускорения (рис. 2.10) и тягового баланса (рис.2.7), очевидно, что ускорения автомобиля прямо пропорциональны тяговому усилию на ведущих колесах или динамическому фактору и обратно пропорциональны силам сопротивления движению и коэффициенту учета вращающихся масс. Этот коэффициент больше на низших передачах, чем на высших.
В формулах (2.60) и (2.61) не учтено влияние на ускорение уклона дороги, коэффициента сцепления шин и изменение сцепного веса в режиме разгона автомобиля. Для определения ускорения в реальных условиях автомобилей с различной колесной формулой используется понятие – потенциальное ускорение.
Практически все производители выпускают легковые автомобили малого и среднего класса с колесной формулой 2×4. Такая компоновка позволила повысить КПД трансмиссии и тяговую динамичность, улучшить управляемость и устойчивость. Однако, при разгоне, особенно на подъеме, снижается сцепной вес. Вследствие этого, в тяговом режиме автомобиля уменьшается реализуемая часть потенциального ускорения, а потери скорости существенны в результате пробуксовки ведущих колес. Для ограничения потерь скорости на буксование управление блоком силовых агрегатов оснащается противобуксовочной системой (ПБС). Следует отметить, что перераспределение сцепного веса с ведущего переднего на ведомый задний мост, создает условия для работы двигателя на режимах, не требующих повышенного расхода топлива и мощности.
При трогании заднеприводного автомобиля за счет увеличения сцепного веса, создается возможность реализации повышенного потенциального ускорения по условиям сцепления. Однако двигатель при этом оказывается под нагрузкой, характеризующейся малыми оборотами и значительным крутящим моментом. Поэтому для улучшения тяговой динамики автомобиля необходимо повысить удельную мощность двигателя. В общем случае двигатели, используемые на переднеприводных автомобилях, по мощности, как правило, соответствуют массе АТС в большей степени, чем на заднеприводных.
Наглядным
примером значимости динамической
составляющей сцепного веса является
величина потенциального ускорения (![]() )
в случае разгона или трогании автомобиля
при максимальной мощности двигателя.
Для переднеприводного автомобиля с
учетом формул (2.36) и (2.37) значения
можно определить по формуле :
)
в случае разгона или трогании автомобиля
при максимальной мощности двигателя.
Для переднеприводного автомобиля с
учетом формул (2.36) и (2.37) значения
можно определить по формуле :
 (2.63)
(2.63)
а для заднеприводного :
 (2.64)
(2.64)
где φx, f – коэффициент сцепления и сопротивления качению соответственно; Rz10 , Rz20 - нормальные реакции, действующие на передние и задние колеса в статике; М – масса автомобиля; h – высота центра тяжести; l – колесная база; a – расстояние от центра тяжести до передней оси
Из формулы (2.63) следует, что на тяговую динамику переднеприводного автомобиля существенно влияют положения центра масс, компоновочные параметры и дорожные условия.
Время и путь разгона. Время и путь разгона автомобиля можно определить графоаналитическим способом. С этой целью кривую ускорений разбивают на интервалы, считают, что в каждом интервале скоростей автомобиль разгоняется с постоянным ускорением jср = 0,5(j1 + j2), где j1 и j2 – ускорения соответственно в начале и конце интервала скоростей.
Для повышения точности расчета интервалы скоростей берут равными 0,5…1 м/с – на первой передаче, 1…3 м/с – на промежуточных и 3…4 м/с – на высшей. При изменении скорости от υ1 до υ2 среднее ускорение jср = (υ2 - υ1) Δt1 = Δ υ1/ Δt1. Следовательно, время разгона в том же интервале скоростей
Δt1 = Δ υ1/jcр1.
В интервале скоростей υ2 – υ3 время разгона Δt2 = Δ υ2/jср.2, а общее время разгона от минимально устойчивой скорости до конечной t = Δt1 + Δt2 + … Δtn .
По значениям t, определенным для различных скоростей, строят кривую времени разгона, начиная ее со скорости υmin, для которой t = 0. Для скорости υ2 откладывают значение Δt1. для скорости υ3 - значение Δt1 + Δt2 и т.д. Полученные точки соединят плавной кривой.
Для определения максимальной интенсивности разгона в расчет вводят максимально возможные при данной скорости ускорения.
Время переключения передач tn зависит от квалификации водителя, конструкции коробки передач и типа двигателя. У дизелей угловая скорость коленчатого вала уменьшается до угловой скорости холостого хода медленнее, чем у карбюраторных двигателей, из-за больших инерционных масс. Для водителей высшей квалификации tn = 0,5 …3 с.
Величину Δυn уменьшения скорости автомобиля во время переключения передач можно определить по формуле, полученной путем решения уравнения движения накатом:
Δυn = Ψ tn g/δвр ≈ 9,3 Ψ tn.
При расчете пути S разгона условно считают, что в каждом интервале скоростей автомобиль движется равномерно со средней скоростью υср = 0,5(υ1 + υ2). Приращение пути (в м) в каждом из интервалов скоростей
ΔS = υср Δt = υсрΔυ/jср.
Складывая полученные значения ΔS, строят суммарную кривую S, начиная с той же скорости, с которой строили кривую t. Путь Sn (в м), пройденный автомобилем за время переключения передач, определяют по формуле
Sn = υn tn = (υн – 4,7Ψ tn) tn,
где υn – средняя скорость автомобиля за время переключения передач, м/с;
υн – скорость автомобиля в момент начала переключения передач, м/с.
Связь между временем и путем разгона наглядно иллюстрирует график интенсивности разгона (рис. 2.11).
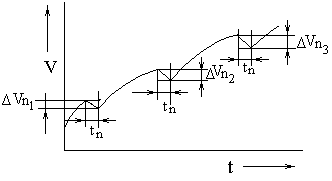
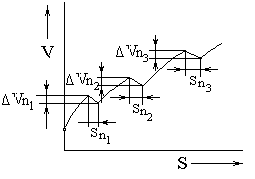
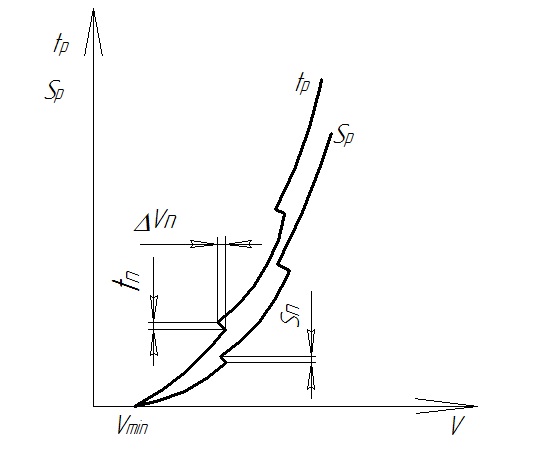
Рис. 2.11. График зависимости времени и пути разгона от скорости автомобиля
Для построения этого графика в координатах t – S наносят сначала значения времени t1 и пути S1, соответствующие разгону автомобиля от скорости υ1 до скорости υ2, затем значения t1 + t2 и S1 + S2 для интервала скоростей υ1 – υ3 и т.д. После этого полученные точки соединяют плавной кривой.