

3 Выбор промышленного робота для ртк
Для выбора промышленного робота, работающего в составе РТК, необходимо отметить основные требования, которым должен соответствовать промышленный робот:
-обеспечение заданной грузоподъемности;
-размеры рабочей зоны промышленного робота должны определяться размерами, формой и положением рабочих зон обслуживаемого оборудования;
-система управления промышленного робота выбирается с учетом способа позиционирования рабочего органа, количества управляющих координат, объема памяти;
-захватное устройство ПР выбирается с учетом конструктивно-технологических параметров объекта манипулирования.
-грузоподъемность промышленного робота должна превышать массу объекта манипулирования не менее чем на 10%.
Формы и размеры рабочей зоны должны быть такими, чтобы загрузка и выгрузка заготовки из рабочей зоны основного и вспомогательного оборудования осуществлялась беспрепятственно.
Для разгрузки-загрузки станка модели 2206ВМФ4 могут быть использованы ПР с прямоугольной и цилиндрической системой координат.
Для промышленного робота, работающего в составе РТК, число степеней подвижности в наибольшей степени зависит от формы, размеров и положения рабочей зоны оборудования и относительного положения ограничительных поверхностей, образующих зону загрузки-разгрузки.
Погрешность позиционирования влияет на процесс установки заготовки в приспособлении, как основного, так и вспомогательного оборудования.
В соответствии с выше изложенным выбираем промышленный робот модели “JOB’ oT-10”.
- грузоподъемность – 50 кг;
- число степеней подвижности – 5;
- число программируемых координат – 5;
- привод основных движений – электромеханический;
- система управления – позиционная;
- средство программирования – обучение;
- погрешность позиционирования – ±2 мм
- наибольший вылет руки – 2500 мм;
- линейное перемещение, мм:
r = 1170;
z = 1000.
- скорость линейного перемещения, м/с:
r = 0,6;
z = 0,5.
- угловые перемещения, °:
φ = 300;
α = 350;
β = 180.
- угловая скорость, °/с:
φ =60;
α =60;
β = 60.
- масса – 2400 кг.

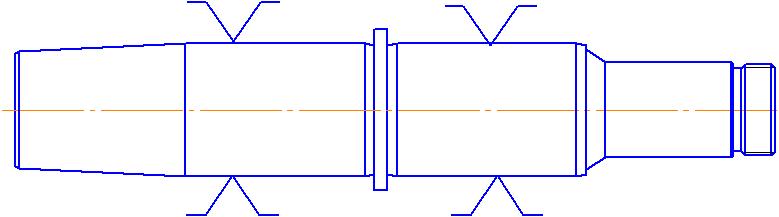
Рисунок 4 – Схема ПР
На рисунке 5 представим схему захвата заготовки.
Рисунке 5 – Схема захвата заготовки
4 Выбор вспомогательного оборудования для ртк
Основными функциями вспомогательного оборудования является:
функция накопления;
функция транспортирования и поштучной выдачи изделий;
функция ориентации и переориентации изделий.
Основным требованием к выбору вспомогательного оборудования для РТК является: заготовка при поступлении и удалении должна занимать требуемое положение относительно захватного устройства ПР, а рабочая зона вспомогательного оборудования должна пересекаться с рабочей зоной промышленного робота.
В состав проектируемого РТК в качестве вспомогательного оборудования будет входить тактовый стол. На пластины тактового стола устанавливаются приспособления с заготовками. В качестве приспособления для базирования используются призмы, которые выбираются в зависимости от величины диаметров заготовки, устанавливаемой на ней. Выбираем призмы 7033-0108 ГОСТ 12197-66.
Представим схему укладки заготовки в призму на рисунке 6.

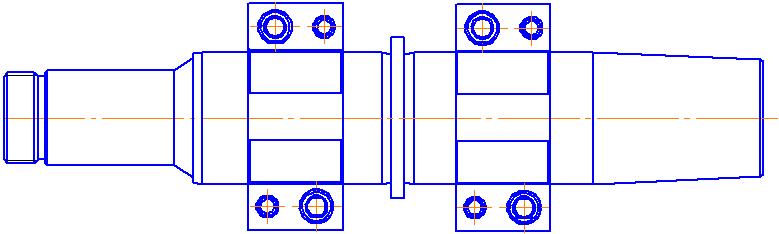
Рисунок 6 – Схема укладки заготовки в призму
В состав проектируемого РТК будет входить тактовый стол СТ 350, служащий для хранения заготовок (готовых деталей) и подачи их в зону (из зоны) захвата ПР. Время поворота тактового стола Тв=3,5 с. Представим схему тактового стола СТ 350 и пластины к нему на рисунке 7.

Рисунок 7 – Схема тактового стола СТ 350 и пластины к нему