

1.Что называется объектом управления в системах автоматики?
Это совокупность технических средств, которая нуждается специально организованных воздействий из вне для достижения поставленной цели управления
2. В чем отличие САР, построенных по принципу управления по возмущению от САР, построенных по принципу управления по отклонению?
управление по возмущению для инерционных объектов, каковыми является большинство объектов промышленности, является более быстродействующим, чем управление по отклонению.
3.
Ч то
является временем регулирования САР?
то
является временем регулирования САР?
Это время. За которое выходная координата величины достигнет, некоторые на перед заданного значения
4. Что называется системой автоматического регулирования?
Преобразует выходную велечину в сигнал сравнивает его с заданным значением и по их разности Х осущ. Регулирующие воздействия на объект
5.Что называется фазово-частотной характеристикой?
Изменение отставания сигнала φ(сдвиг по фазе) от частоты
6. Какое входное воздействие должно быть при исследовании частотных характеристик САР?
7. Что называется возмущающим воздействием?
воздействие, стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной.
8. Определите передаточную функцию САР, имеющую следующую структуру:

9. Запишите уравнение идеального дифференцирующего звена
Выходная величина пропорциональна производной по времени от входной:
![]() ;
W(s) = K*s
;
W(s) = K*s
10. Что является электрическим аналогом апериодического звена 1-го порядка
термопара, электродвигатель
11. Принципиальная схема — это схема электрических соединений, выполненная в развернутом виде. Она является основной схемой проекта электрооборудования производственного механизма и дает общее представление об электрооборудовании данного механизма, отражает работу системы автоматического управления механизмом, служит источником для составления схем соединений и подключений, разработки конструктивных узлов и оформления перечня элементов.
12.
Статическая
характеристика звена с одним входом u
может быть представлена кривой y
= F(u) (рис.13).
Если звено имеет второй вход по
возмущению f,
то статическая характеристика задается
семейством кривых y
= F(u) при
различных значениях f,
или y
= F(f) при
различных u.
13.
14. 3 –го порядка
15. отличительной особенностью критерия Найквиста от Михайлова заключается в том что годограф системы строится на основе характеристического уравнения разомкнутой системы.
16.
.
17.
 R1*R3
= R2*R4
R1*R3
= R2*R4
18.
 Индуктивный
датчик состоит из ярма 1, обмотки 2, якоря
3- удерживается пружинами.
Индуктивный
датчик состоит из ярма 1, обмотки 2, якоря
3- удерживается пружинами.
19. термопара. индукционный датчик.
20. Синхронизирующий момент между валами сельсина- датчика и сельсина- приемника создается при наличии некоторого пространственного угла,называемого углом рассогласования. Появляющиеся при этом ЭДС обеспечивают протекание тока по обмоткам синхронизации датчика и приемника. В результате в сельсине- приемнике возникает момент, старающийся повернуть его вал на угол равный углу поворота датчика. Из - за наличия механической нагрузки на валу приемника угол рассогласования, как правило, больше нуля.
21. Какова роль обмотки смещения в магнитном усилителе?
22. Что называется системой автоматического измерения?
САР, преобразующая выходную величину в сигнал, сравнивающую его с предельным и сигнализирующая об его отклонении.
23. Чем можно устранить статистическое отклонение САУ?
Применение интегрирующих звенье
24. Что понимается под запасом устойчивости по амплитуде?
Величина, на которую может увеличиваться сдвиг по фазе в разомкнутой системе при К (w)=1, чтобы замкнутая система оказалась на границе устойчивости.
25. Что является механическим аналогом апериодического звена первого порядка?
26. Что называется регулируемой ( управляемой) величиной в системах автоматики
Величина (координата) объекта, которая преднамеренно изменяется или сохраняется неизменной в процессе уравнения.
27. В чем преимущества САР, построенных по принципу управления по отклонению?
Наличие обратной связи
28. Какие звенья системы автоматического управления, построенные по принципу управления по отклонению, являются обязательными?
Возможно: наличие усилителя входного сигнала
29. Что называется системой автоматического контроля?САК, преобразующая выходную величину в сигнал, сравнивающую его с предельным и в случае его превышения сигнализирующая об его отклонении.
30. Что является амплитудно - частотной характеристикой
Зависимость отношения амплитуды сигнала на выходе звена к амплитуде на входе от частоты входного сигнала.
31. Запишите вид уравнения колебательного звена
Уравнение движения колебательного звена имеет вид:
![]() , где
, где
![]()
![]() –
относительный коэффициент демпфирования
(затухания), характеризующий колебательность
звена
–
относительный коэффициент демпфирования
(затухания), характеризующий колебательность
звена
![]()
32. Что называется управляющим воздействием?
В теории автоматического управления — это сигнал. Анализ особенностей таких «сигнальных» управляющих воздействий показывает, что их смысловое (информационное) содержание полностью определяется параметрами материального носителя, представленного в виде механического, химического, электрического, электромагнитного и т. п. воздействия на объект управления (ОУ). Такое воздействие непосредственно оказывается на объект управления и вызывает (при отсутствии возмущений) однозначную реакцию в изменении значений параметров, характеризующих состояние ОУ. То есть «сигнал» можно рассматривать в качестве первопричины изменения состояния объекта управления.
33. Составьте передаточную функцию для САР Передаточная функция является дробно-рациональной функциейкомплексной переменной:
 где:
где:![]()
34. Запишите вид уравнения апериодического звена 2-го порядка W(s) = K/[(T1·s + 1)·(T2·s + 1)], где K – коэффициент усиления; T1 и T2 – постоянные времени, также характеризующая инерционность системы, т.е. продолжительность переходного процесса в ней. (T1> 0 и T2> 0).
37. Что называется динамической характеристикой звена?
Динамической характеристикой звена называется зависимость междувходной и выходной величинами в период переходного процесса регулирования в функции времени.
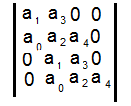
38. Что является необходимым условием устойчивости САР, описанной дифференциальным уравнением n-го порядка?
Для устойчивости линейной системы n-го порядка необходимо и достаточно, чтобы были положительны все коэффициенты характеристического уравнения и определитель Гурвица.
39.
Покажите, при каком годографе САР будет
устойчивой согласно критерия Михайлова,
описанная полиномом
 ?
?
j V(w)
V(w)




 U(w)
U(w)
40. Чему равна передаточная функция системы Wэ состоящей из трех звеньев со своими передаточными функциями W1, W2, W3 при наличии обратной отрицательной связи со звеном обратной связи W3?
Wэ =У/х;(Wэ= (W1+W2+W3)/1+W3*Woc<=вроде так)При положительной обратной связи в знаминателиWэставится знак
“ - “. При отрицательной обратной связи ставится знак “+”.
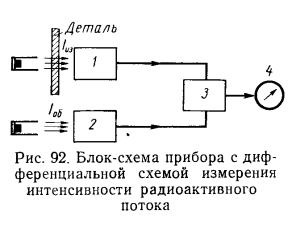
41. Изобразите дифференциальную схему измерений
42. Какие датчики можно отнести к классу параметрических
Датчики, которые для измерения и преобразования требуют дополнительных источников питания
43. Для каких целей применяются шаговые искатели?
обычно применяется для коммутации одного четырехпроходного входа с любым из 15 четырехпроходных, т.е. m= 15
44. Какие основные требования предъявляются к материалу магнитопровода магнитного усилителя?
ферромагнитных материалов
45. Что называется системой автоматической защиты и блокировки?
Системы автоматической блокировки и защиты служат для предотвращения возможности возникновения аварийных ситуаций в технических агрегатах и устройствах. В том случае, когда какая-либо величина, характеризующая поведение защищаемого агрегата, достигает своего критического ( по тем или иным соображениям) значения, система автоматической блокировки и защиты без участия человека оказывает воздействие на защищаемый агрегат, частично или полностью прекращая его работу.
46. Что называется элементарным звеном направленного действия САУ?
Под звеньями системы автоматики понимается такая часть системы, алгоритм работы которой, нельзя разбить на более простые алгоритмы. И направление в таких звеньях осуществляется только в одном направлении , от входа к выходу.
47. Что понимается под запасом устойчивости по фазе?
Запас устойчивости системы непосредственно связан с величиной максимума амплитудно-частотной характеристики замкнутой системы регулирования по отношению к управляющему воздействию.
48. Что является механическим аналогом апериодического звена второго порядка?
49. Что называется задающим воздействием (величиной) в системах автоматики?
Входами СУ являются задающее воздействие и возмущающее воздействие . Только входное воздействие это полезный сигнал, а возмущающее воздействие является, как правело неконтролируемой помехой, действие которой надо подавить.
50. Какие звенья системы автоматического управления, построенной по принципу управления по отклонению, являются обязательными?
51. Колебательное звено 2-го порядка (0 < ξ < 1)
52. При
r<1 корни полинома знаменателя W(p)
комплексно сопряженные: p1,2
=
![]() ±
j
±
j![]() .
Переходная характеристика представляет
собой выражение, характеризующее
затухающий колебательный процесс с
затуханием
и
частотой
(рис.46).
Такое звено называется колебательным.
При r = 0 колебания носят незатухающий
характер. Такое звено является частным
случаем колебательного звена и называется
консервативным.
Примерами колебательного звена могут
служить пружина, имеющая успокоительное
устройство, электрический колебательный
контур с активным сопротивлением и т.п.
Зная характеристики реального устройства
можно определить его параметры как
колебательного звена. Передаточный
коэффициент k равен установившемуся
значению переходной функции.
.
Переходная характеристика представляет
собой выражение, характеризующее
затухающий колебательный процесс с
затуханием
и
частотой
(рис.46).
Такое звено называется колебательным.
При r = 0 колебания носят незатухающий
характер. Такое звено является частным
случаем колебательного звена и называется
консервативным.
Примерами колебательного звена могут
служить пружина, имеющая успокоительное
устройство, электрический колебательный
контур с активным сопротивлением и т.п.
Зная характеристики реального устройства
можно определить его параметры как
колебательного звена. Передаточный
коэффициент k равен установившемуся
значению переходной функции.
54. Кроме того, настройка регулятора может определяться характером изменения во времени возмущающих воздействий. Если в системе возникают возмущающие воздействия (в виде единичных скачков), то следует применять регулятор с достаточно большой И - составляющей, чтобы в кратчайшее время устранить отклонение регулируемой величины. Всегда следует учитывать, что увеличение коэффициента передачи регулятора усиливает колебательность процесса регулирования (увеличивает перерегулирование). Уменьшение коэффициента передачи регулятора вызывает более затянутый процесс и большую остаточную неравномерность (в случае П - регулятора).
55.

ξ ≥ 1 — апериодическое звено второго порядка.
57.
Если
W(j
)
изобразить вектором на комплексной
плоскости, то при изменении
от
0 до +
![]() его
конец будет вычерчивать кривую, называемую
годографом
вектора
W(j
),
или амплитудно
- фазовую частотную характеристику
(АФЧХ)
(рис.48). Ветвь АФЧХ п
его
конец будет вычерчивать кривую, называемую
годографом
вектора
W(j
),
или амплитудно
- фазовую частотную характеристику
(АФЧХ)
(рис.48). Ветвь АФЧХ п ри
изменении
от
-
до
0 можно получить зеркальным отображением
данной кривой относительно вещественной
оси.
ри
изменении
от
-
до
0 можно получить зеркальным отображением
данной кривой относительно вещественной
оси.
58.
59.

60. Индукционный датчик положения по п.1, отличающийся тем, что неподвижная часть индукционного датчика положения содержит две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.