

3. Результати моделювань
Була проведена наступна серія експериментів для встановлення впливу різних параметрів руху об’єкта та інтегрування на похибку БСО:
Похибки БСО в залежності від кроку інтегрування
Похибки БСО в залежності від частоти вимушених коливань
Похибки БСО в залежності від амплітуди коливань
В кінці було виведено теоретичну формулу, що описує дрейф БСО в залежності від зміни досліджуваних параметрів моделі.
Приймемо як базові величини параметрів
кроку інтегрування
![]() частоти
коливань
частоти
коливань
![]() та амплітуду коливань 0.2 рад.
та амплітуду коливань 0.2 рад.
Похибки бсо в залежності від кроку інтегрування
В цій серії визначалася величина дрейфу БСО за час 100 секунд при різних значеннях кроку інтегрування. Для цього були проведені моделювання, представлені на рис.3.1 – 3.5
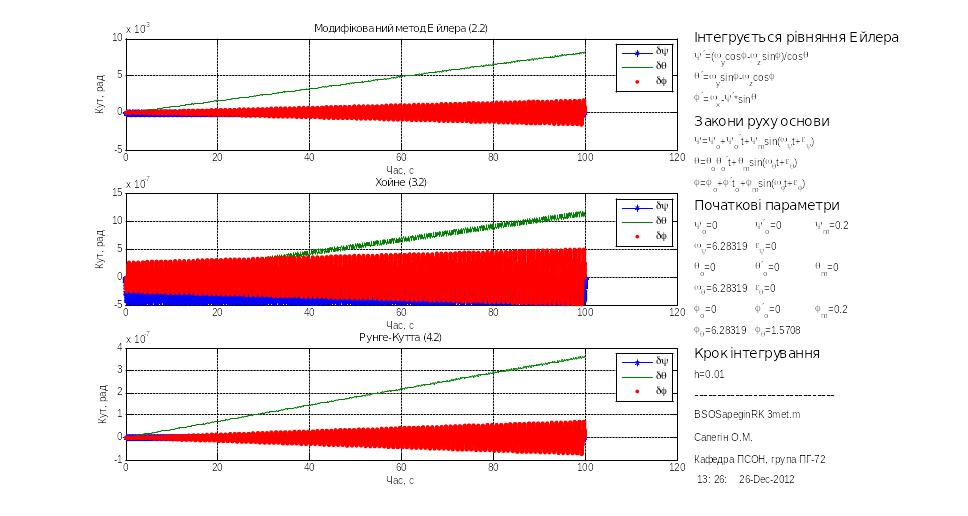
Рис.3.1 h=0.01
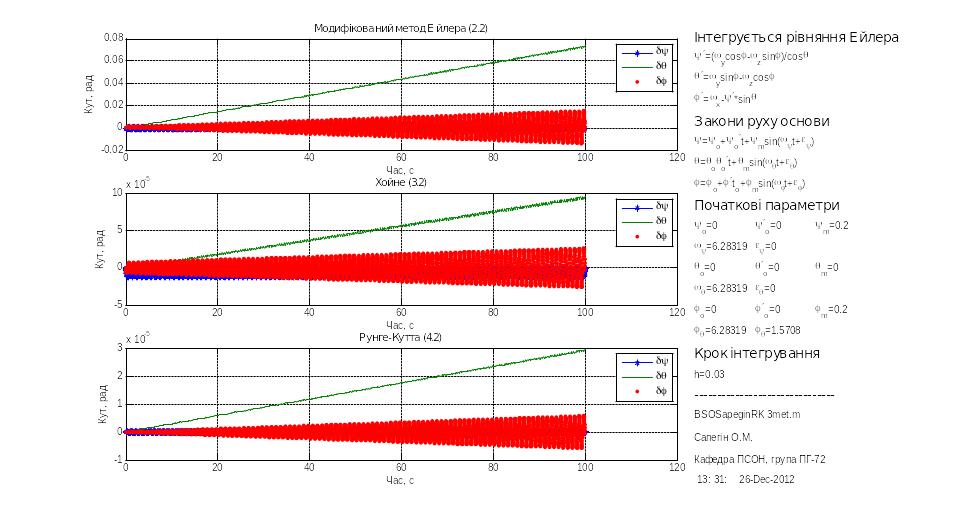
Рис.3.2h=0.03
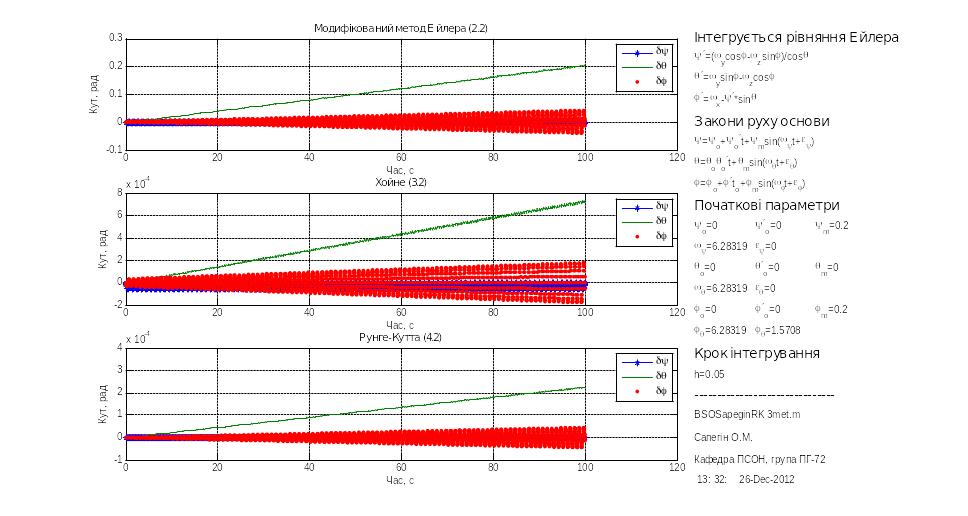
Рис.3.3h=0.05
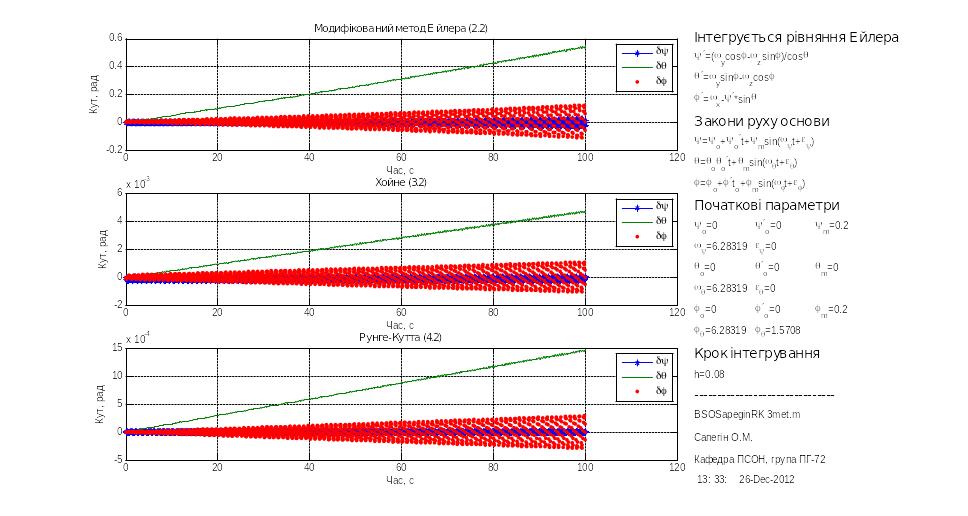
Рис.3.4h=0.08
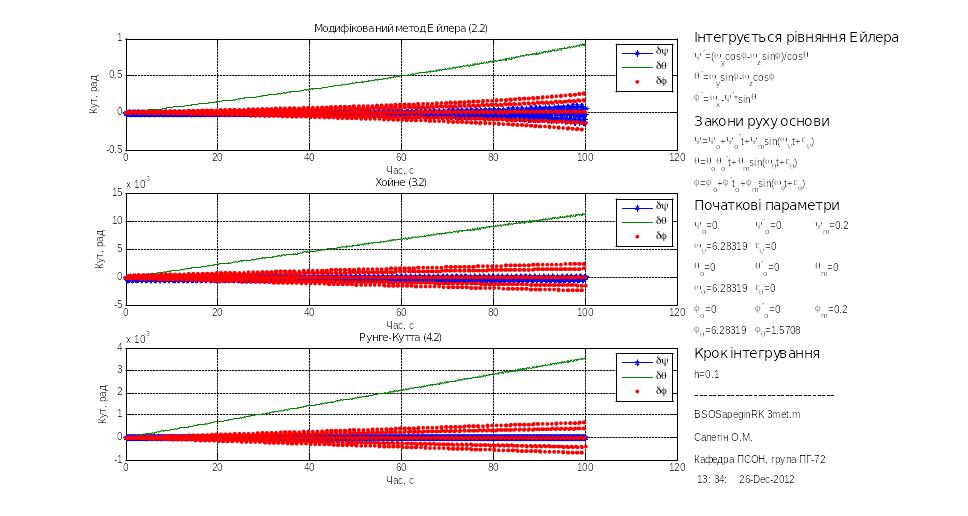
Рис.3.5h=0.1
В результаті були отримана залежність дрейфу БСО від кроку інтегрування що представлена на рис. 3.6.
Ці досліди проводилися з програмною моделлю побудованою з використанням кінематичних рівнянь Ейлера. Моделювання для рівнянь Пуассона та кватерніонних рівнянь руху проведено аналогічно. Результати представлені на рис. 3.7та 3.8.
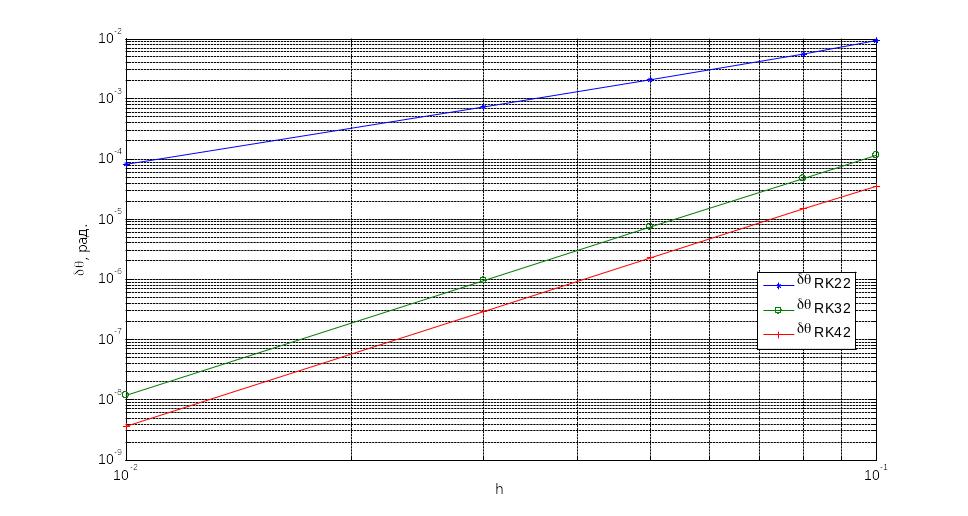
Рис.3.6 Кінематичне рівняння Ейлера
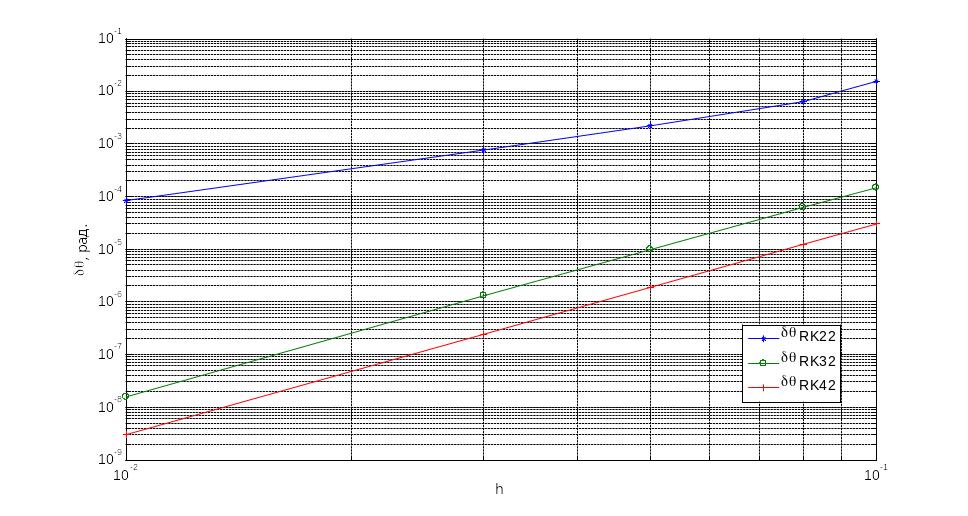
Рис.3.7 Кінематичне рівняння Пуассона
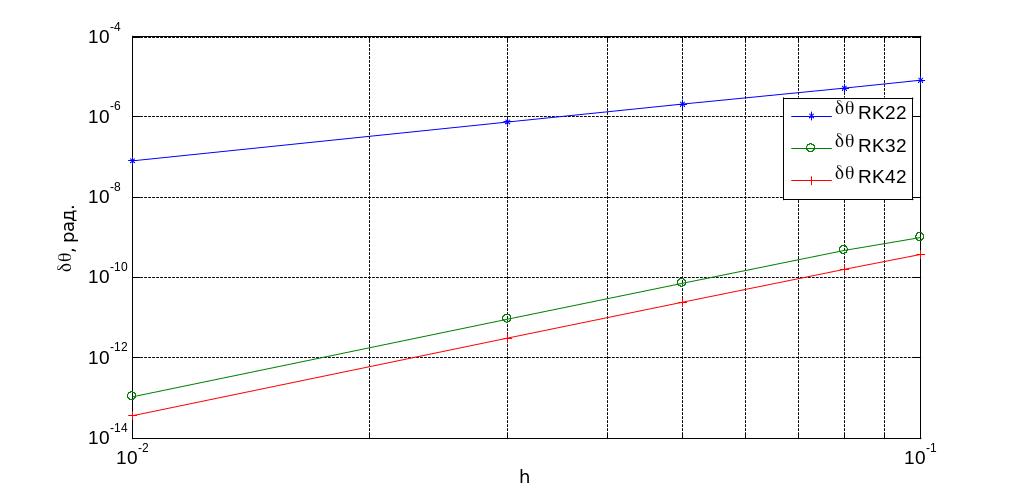
Рис.3.8 Рівняння у кватерніонах
Похибки бсо в залежності від частоти вимушених коливань
У минулій главі хід досліджень пояснювався на прикладі моделювання БСО заданої кінематичними рівняннями Ейлера. Аналогічні досліди були проведені і для встановлення залежності дрейфу БСО в залежності від частоти коливань основи, але у цій серії моделювань покажемо роботу програмної моделі що реалізує БСО описаної рівняннями Пуассона. Результати представлені на рис.3.9 – 3.12
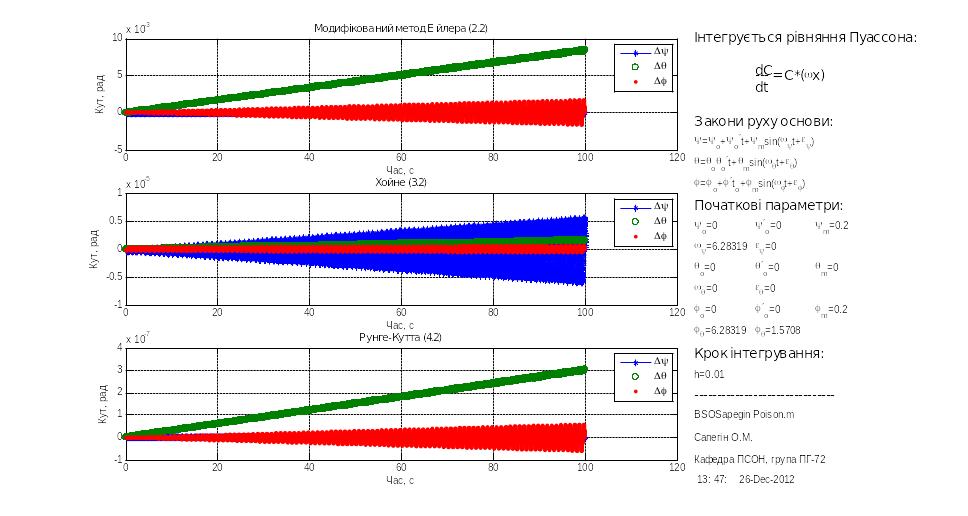
Рис.3.9
![]()
![]()
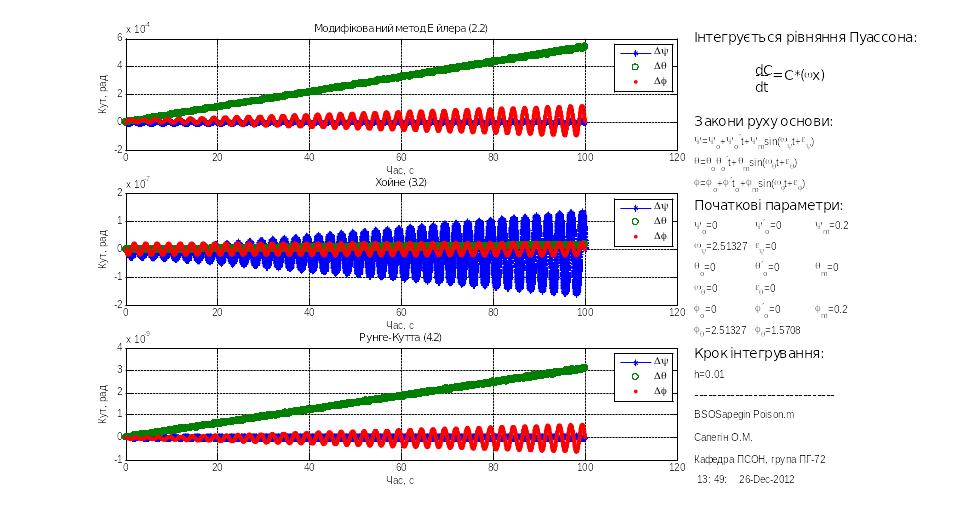
Рис.3.10
![]()

Рис.3.11
![]()
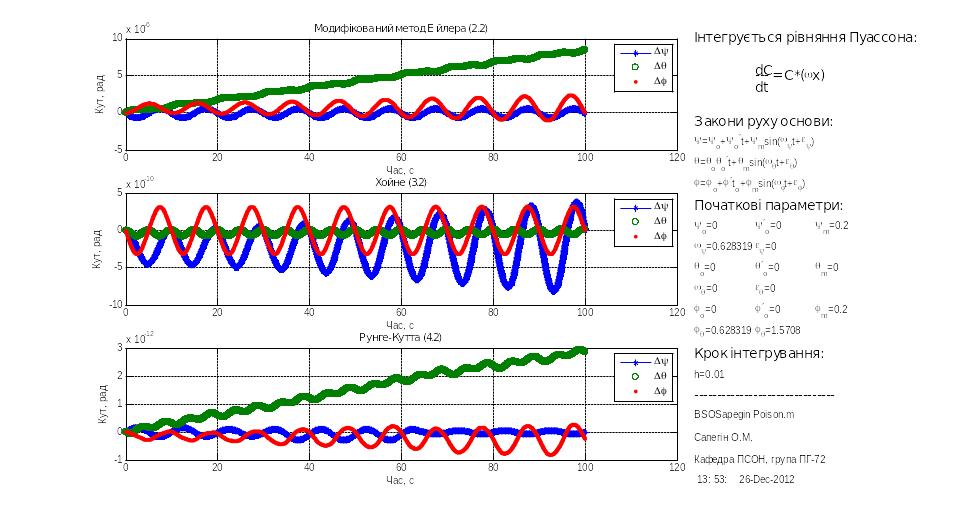
Рис.3.12
![]()
В результаті отримана залежність представлена на рис.3.13
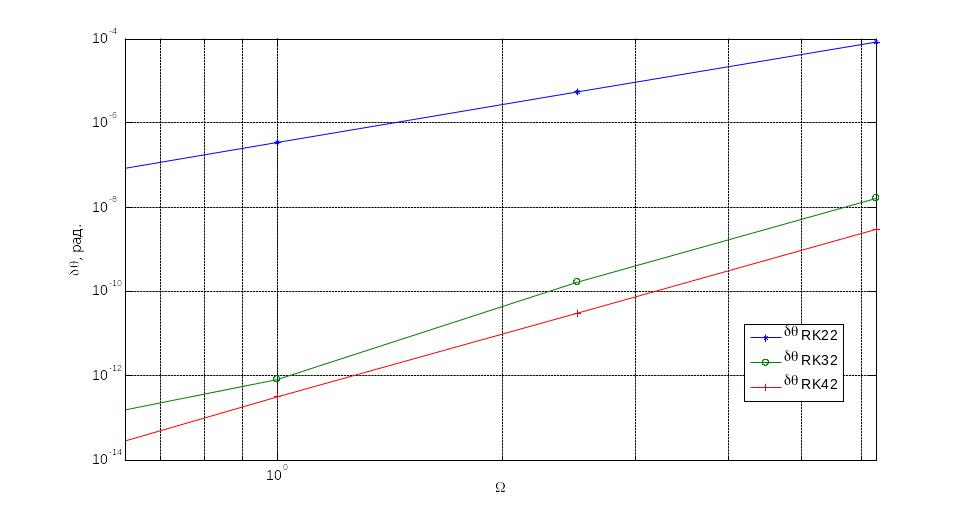
Рис.3.13 Кінематичне рівняння Пуассона
Моделювання для БСО заданих через кінематичні рівняння Ейлера та у кватерніонах проводилися аналогічно. Результати подано нижче на рис.3.14 та рис.3.15
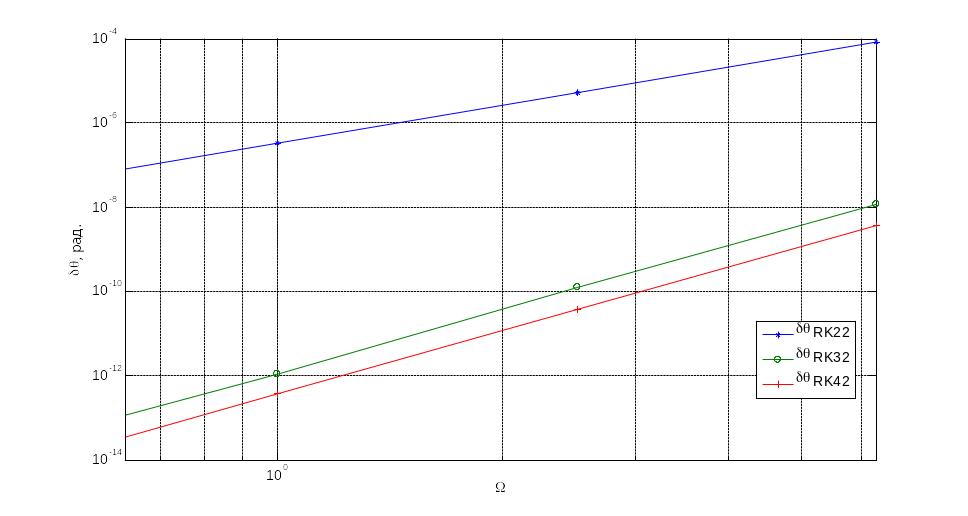
Рис.3.14 Кінематичне рівняння Ейлера
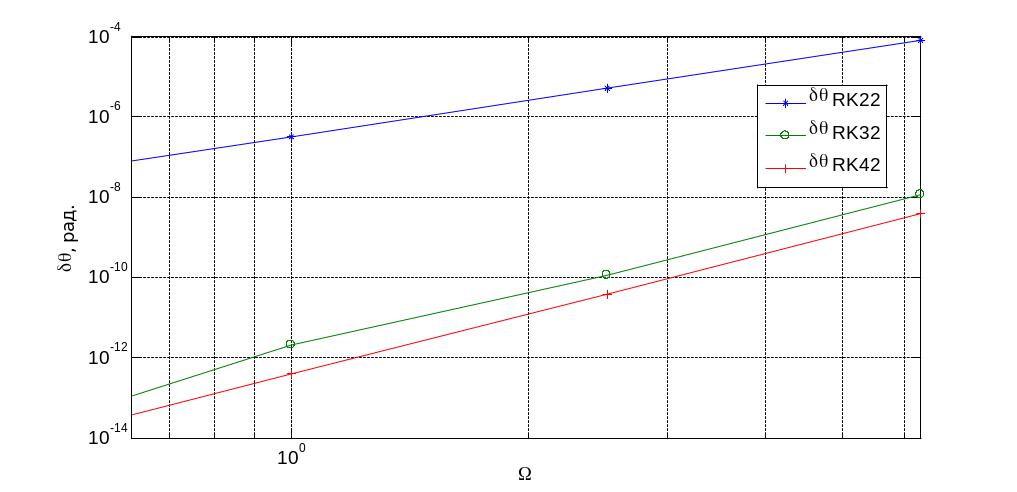
Рис.3.15 Кінематичне рівняння кватерніонах
Похибки бсо в залежності від амплітуди коливань
Покажемо хід моделювання на прикладі дослідження похибок БСО, побудованої у програмній моделі з використанням кватерніонних рівнянь.
Результати подано нижче на рис. 3.16 – 3.19.
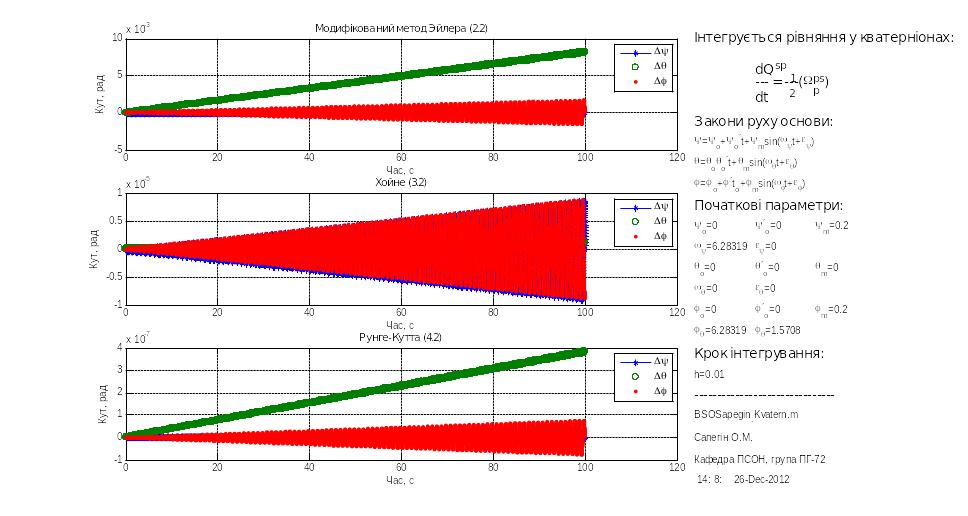
Рис.3.16![]() рад.,
рад.,
![]() рад.
рад.
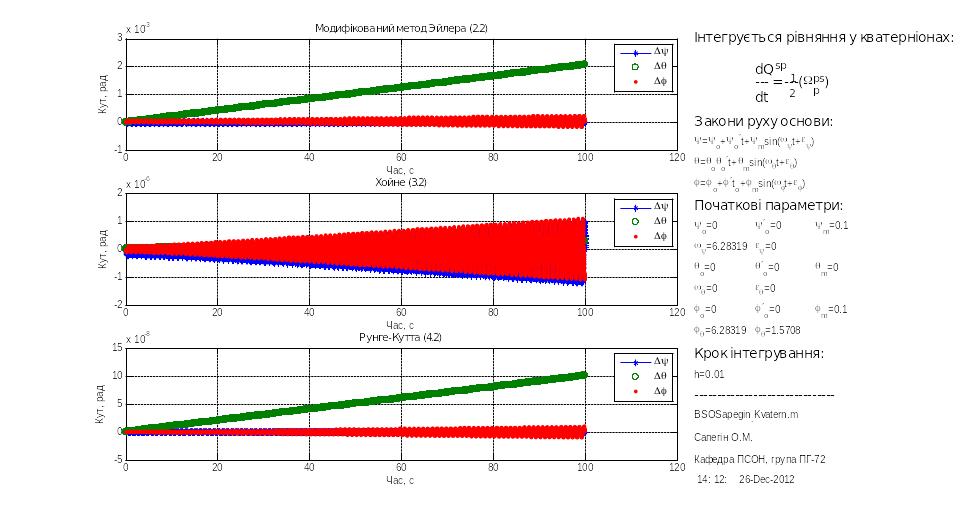
Рис.3.17![]() рад.,
рад.,
![]() рад.
рад.
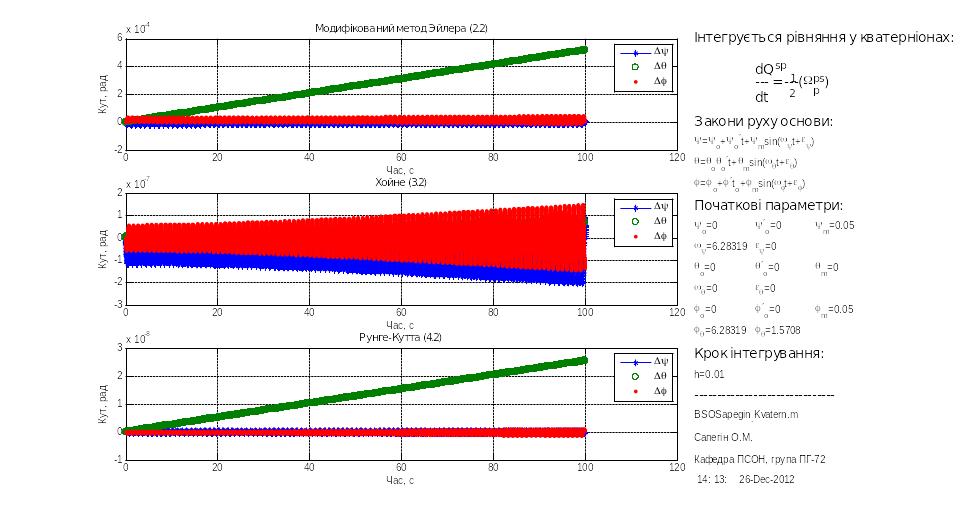
Рис.3.18![]() рад.,
рад.,
![]() рад.
рад.
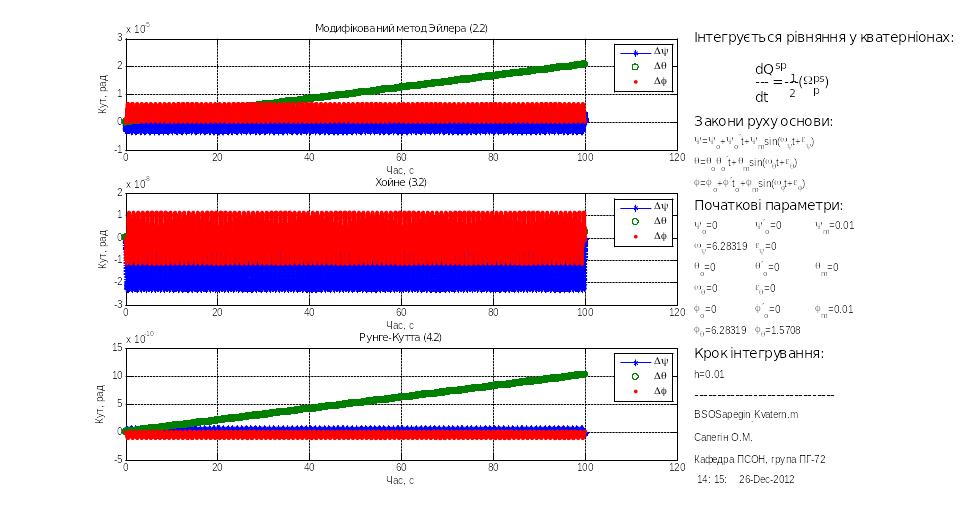
Рис.3.19![]() рад.,
рад.,
![]() рад.
рад.
Залежність похибки БСО від амплітуди коливань основи подано на рис.3.20
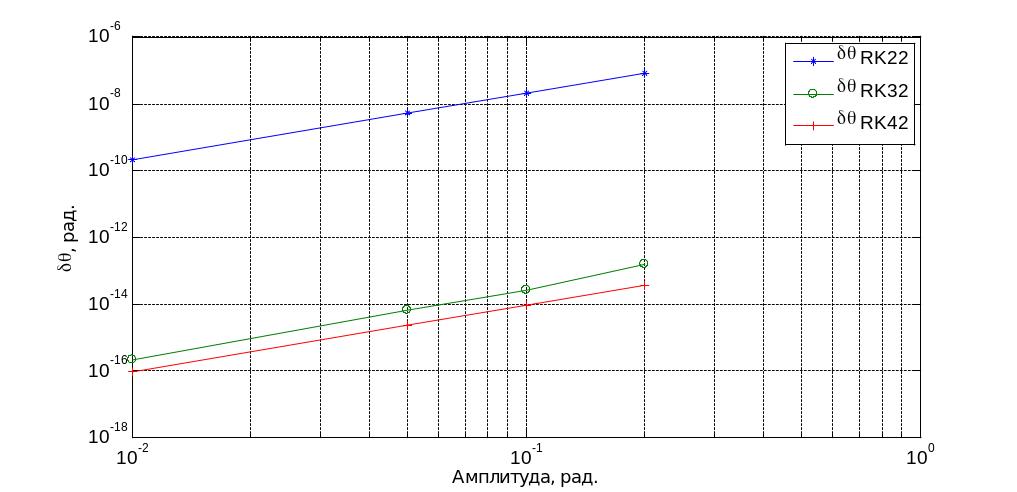
Рис.3.20 Кінематичне рівняння кватерніонах
Результати моделювань для БСО побудованих з використанням рівнянь Ейлера та Пуассона подано нижче на рис.3.21 та рис.3.22 відповідно.
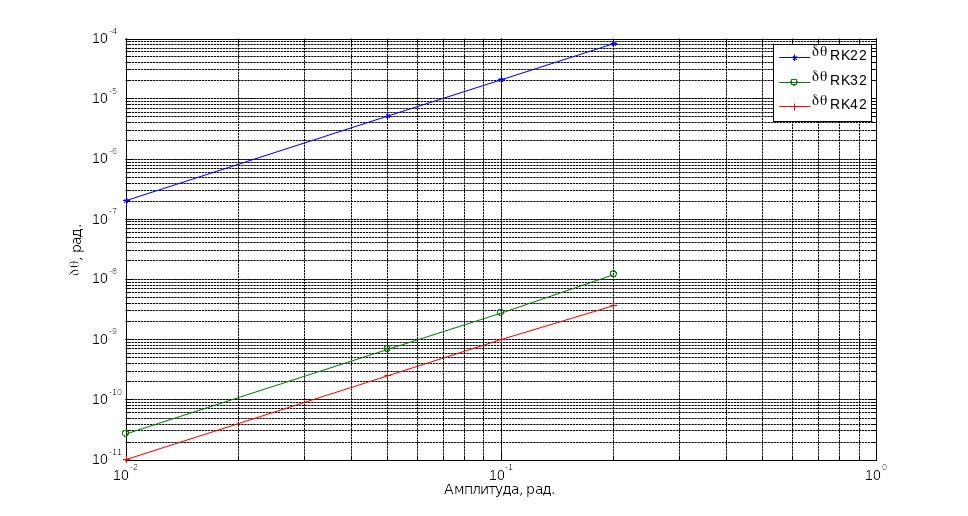
Рис.3.19 Кінематичне рівняння Ейлера
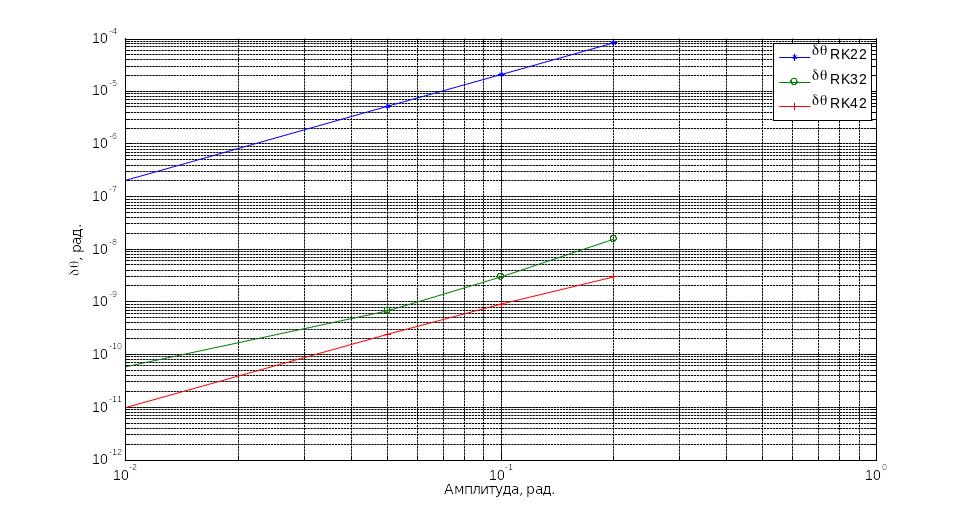
Рис.3.20 Кінематичне рівняння Пуассона
Виведення алгоритмічної формули дрейфу бсо
На основі даних отриманих у пунктах 3.1 – 3.3 виведемо загальну формулу дрейфу БСО.
У загальному вигляді вона має вигляд.
![]() (3.1)
(3.1)
де
![]() ,
,
![]() та а відповідно значення кроку,
частоти та амплітуди;
та а відповідно значення кроку,
частоти та амплітуди;
p, nта m – показникистепеня;
K – сталий коефіцієнт.
Формула (3.1) описує дрейф приладу в тому випадку коли на нього впливає одразу три параметри: крок інтегрування, частота і амплітуда вібрації основи. Проте наші досліди проводилися при зміні лише одного з цих параметрів, тобто обидва інших були постійними. Тому для опису дрейфу БСО досліджуваного у пунктах 3.1 – 3.3 формула (3.1) перетвориться на
![]() (3.2)
(3.2)
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
Показники степеня p, nта mможна визначити встановивши нахил логарифмічних характеристик представлених на рис.3.6 – 3.8, рис.3.13 – 3.15 та рис.3.20 – 3.21, представлених вище. Із них видно що p=2 для модифікованого метода Ейлера та p=4 для методів Хойне та Рунге-Кутта; n=2 для всіх методів інтегрування; m=2 також для всіх трьох методів.
Із (3.2) – (3.4) знайдемо коефіцієнти
![]() ,
,
![]() та
та
![]() .
.
![]() (3.5)
(3.5)
![]() (3.6)
(3.6)
![]() (3.7)
(3.7)
Підставимо раніше отримані значення дрейфів, параметрів та показників степеня до формул (3.5) – (3.7) то розрахуємо значення коефіцієнтів.
![]()
![]()
![]()
![]()
Знаючи коефіцієнти , та можемо знайти коефіцієнт K із формули (3.1).
![]() (3.8)
(3.8)
аналогічно ![]() (3.9)
(3.9)
![]() (3.10)
(3.10)
Із (3.8) – (3.10) знайдемо коефіцієнт Kпри чому значенняh, та а приймемо базові.
![]()
![]()
![]()
Як видно із розрахунків коефіцієнти Kмайже не відрізняються. Остаточна формула буде мати вигляд
![]() (3.11)
(3.11)
Аналогічно отримано формули дрейфів для програмних моделей БСО побудованих на рівняннях Пуассона та у кватерніонах
![]()
![]()
Тоді остаточна формула дрейфу БСО побудованої на рівняннях Пуассона буде мати вигляд
![]() (3.12)
(3.12)
Для БСО побудованої на кватерніонах:
![]()
![]()
Тоді остаточна формула дрейфу БСО побудованої на рівняннях у кватерніонах буде мати вигляд
![]() (3.13)
(3.13)