

 СОДЕРЖАНИЕ
СОДЕРЖАНИЕ
Введение 2
Автоматика, отрасль науки и техники, охватывающая теорию и принципы построения систем управления, действующих без непосредственного участия человека; в узком смысле - совокупность методов и технических средств, исключающих участие человека при выполнении операций конкретного процесса. Как самостоятельная область техники А. получила признание на 2-й Мировой энергетической конференции (Берлин, 1930), где была создана секция по вопросам автоматического и телемеханического управления. В СССР термин "А." получил распространение в начале 30-х гг. 2
А. как наука возникла на базе теории автоматического регулирования, основы которой были заложены в работах Дж.К. Максвелла (1868), И.А. Вышнеградского (1872-1878), А. Стодолы (1899) и др.; в самостоятельную научно-техническую дисциплину окончательно оформилась к 1940. 2
1 Понятие системы автоматического управления 3
2 Исполнительный механизм в структуре САУ 4
3 Исполнительный механизм на основе пьезодвигателя 5
Заключение 15
Литература 17
Введение
Автоматика, отрасль науки и техники, охватывающая теорию и принципы построения систем управления, действующих без непосредственного участия человека; в узком смысле - совокупность методов и технических средств, исключающих участие человека при выполнении операций конкретного процесса. Как самостоятельная область техники А. получила признание на 2-й Мировой энергетической конференции (Берлин, 1930), где была создана секция по вопросам автоматического и телемеханического управления. В СССР термин "А." получил распространение в начале 30-х гг.
А. как наука возникла на базе теории автоматического регулирования, основы которой были заложены в работах Дж.К. Максвелла (1868), И.А. Вышнеградского (1872-1878), А. Стодолы (1899) и др.; в самостоятельную научно-техническую дисциплину окончательно оформилась к 1940.
Понятие системы автоматического управления
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины - выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта - управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления.
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
САУ классифицируются в основном по цели управления, типу контура управления, то есть способ компенсации возмущений(замкнутые- есть обратная связь, и разомкнутые) и способу передачи сигналов(дискретные и непрерывные).
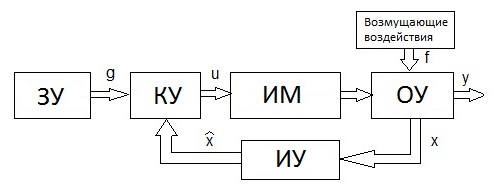

Рисунок 1 – Структурная схема САУ
2 Исполнительный механизм в структуре сау
Исполнительный механизм, сервопривод, устройство, предназначенное для перемещения регулирующего органа в системах автоматического регулирования или дистанционного управления, а также в качестве вспомогательного привода элементов следящих систем, рулевых устройств транспортных машин и т. п. Изменение положения регулирующего органа вызывает изменение потока энергии или материала, поступающих на объект, и тем самым воздействует на рабочие машины, механизмы и технологические процессы, устраняя отклонения регулируемой величины от заданного значения. И. м. не только изменяет состояние управляемого объекта, но и перемещает регулирующий орган в соответствии с заданным законом регулирования при минимально возможных отклонениях. В большинстве случаев И. м. действуют от посторонних источников энергии, так как непосредственное управление И. м. от первичных элементов регулирования (реле, датчиков и др.) невозможно вследствие их малой мощности, недостаточной для воздействия на регулирующий орган.
И. м. обычно состоит из двигателя, передачи и элементов управления, а также элементов обратной связи, сигнализации, блокировки, выключения.
По виду потребляемой энергии ИМ подразделяются:
- электрические;
- пневматические;
- гидравлические.
3 Исполнительный механизм на основе пьезодвигателя
3.1 Понятие пьезодвигателя и пьезоэффекта
Пьезоэлектрическими двигателями(ПЭД) называются двигатели, в которых механическое перемещение ротора осуществляется за счет пьезоэлектрического или пьезомагнитного эффекта.
Интерес, который вызывают такие устройства, объясняется их широкими конструктивными и технологическими возможностями, высокой надежностью и относительно малой энергоемкостью.
ПЭД имеют значительно меньшие габариты и массу по сравнению с аналогичными по силовым характеристикам электромагнитными двигателями. Отсутствие обмоток, пропитанных склеивающими составами, делает их пригодными для использования в условиях вакуума. ПЭД обладают значительным моментом самоторможения (до 50% величины mах крутящего момента) при отсутствии питающего напряжения за счет своих конструктивных особенностей. Это позволяет обеспечивать очень малые дискретные угловые перемещения (от единиц угловых секунд) без применения каких-либо специальных мер. Этот свойство связано с квазинепрерывным характером работы пьезодвигателя. Действительно, пьезоэлемент, который преобразует электрические колебания в механические питается не постоянным, а переменным напряжением резонансной частоты. При подаче одного или двух импульсов можно получить очень маленькое угловое перемещение ротора. Например, некоторые образцы ПЭД, имеющие рабочую частоту вращения 0,2-6 об/сек при подаче одиночного импульса на обкладки пьезоэлемента дадут в идеальном случае угловое перемещение ротора в 1/9.900.000-1/330.000 от величины окружности, т.е. 0,13-3,9 угловых секунд.
Основным узлом пьезодвигателя является пьзоэлемент, который выполняется из специального материала (например, пьезокерамики). Пьезоэлектрическими материалами называют кристаллические вещества, в которых под действием механических напряжений возникает спонтанная поляризация – явление прямого пьезоэффекта. Наряду с прямым существует и обратный пьезоэффект, который заключается в том, что внешнее электрическое поле вызывает механические напряжения внутри материала, которые приводят к изменению его геометрических размеров.
Указанными свойствами обладают естественные монокристаллические вещества (кварц, сегнетова соль, турмалин и т.д.) и искусственные поликристаллические твердые растворы, структура которых упорядочена предварительной поляризацией в электрическом поле (пьезокерамики – титанаты и цирконаты свинца, бария и т.д.).
Пьезоэлементы из керамики могут утратить работоспособность при приложении внешнего поля с напряженностью выше критической в направлении, противоположном вектору предварительной поляризации.
В направлении, согласном с направлением предварительной поляризации, допустимая напряженность управляющего поля ограничена лишь конструктивными особенностями и условиями электромеханической прочности.
В настоящее время на практике применяется большое разнообразие пьезоэлектрических двигателей, отличающихся по своему характеру создаваемых перемещений, конструкции, диапазонам перемещений и т.д.
Представляется возможным подразделить их на три основные группы:
Резонансные двигатели (ударного действия)
Силовые двигатели с ограниченным диапазоном угловых и линейных перемещений.
Шаговые двигатели микроманипуляторы.