

Универсальные и управляющие эвм
Главное отличие управляющих машин от универсальных ЭВМ состоит в особенности их связи с внешним миром (управляемым объектом). Исходные данные поступают в машину, минуя человека, непосредственно от измерительных приборов или других устройств, фиксирующих характерные параметры объекта, сигналы управления также выдаются машиной непосредственно на объект. Для этого в составе управляющей машины следует предусмотреть специальные устройства связи с объектом. Кроме того, управляющие машины должны обеспечить работу в реальном масштабе времени, что предъявляет специфические требования к их прикладному и системному программному обеспечению. А это, в свою очередь, предопределяет аппаратную архитектуру и структуру машины.
К управляющим машинам предъявляются более высокие требования по надежности, чем к вычислительным машинам. Даже повторение вычислений, позволяющее исключить ошибки при проведении расчетов на вычислительных машинах, как правило, невозможно в системах реального времени.
Для задач управления технологическими процессами и объектами в большинстве случаев достаточно точности вычислений порядка 0,1% (реже 0,01%), так как исходные данные измеряются все равно с определенной погрешностью. Поэтому представление данных может быть ограничено машинным словом длиной 15-32 двоичных разрядов, а не 32, 48, 64 разряда, как в универсальных ЭВМ.
Эти принципиальные отличия обусловили выделение управляющих машин в самостоятельный класс средств вычислительной техники наряду с классом универсальных ЭВМ, предназначенных для решения вычислительных задач и обработки данных. В англоязычной терминологии класс управляющих ЭВМ определен как control computers.
Программное обеспечение
Любые ЭВМ необходимо снабдить программами. Управляющие ЭВМ работают по специальным программам, алгоритм которых предусматривает решение конкретной задачи.
Большие универсальные ЭВМ решают узкоспециальные задачи, поэтому снабжаются специфичным программным обеспечением. Обычно для каждого класса ЭВМ разрабатывались свои ОС. Наиболее распространенными ОС для мэйнфреймов IBM семейства System/360 в своё время являлись DOS/360 для малых машин и OS/360 для больших машин. Для современных мэйнфреймов серий S/390, z900 и RS/6000, которые обслуживают сети, в настоящее время ведутся работы по модификации версий ОС Unix и Linux.
Для микро-ЭВМ наиболее известны операционные системы – MS-DOS, Linux, MacOS и, конечно же, Windows. Одними из первых программ для микро-ЭВМ были языки программирования высокого уровня (Бейсик), игры, текстовые редакторы и табличные процессоры. Наличие удобного и разнообразного программного обеспечения сделало этот класс ЭВМ популярным.
Архитектура системных плат (Лекция 2)
Системная плата, иногда называемая «материнской платой» (motherboard) – основная плата микро-ЭВМ. Именно посредством элементов системной платы происходит взаимодействие между различенными устройствами, составляющими ПК.
Архитектура системной платы определяется набором микросхем (chipset) – это одна или несколько микросхем, таймеры, система управления специально разработанная для "обвязки" микропроцессора. Они содержат в себе контроллеры прерываний, прямого доступа к памяти, памятью и шиной – все те компоненты, которые в оригинальной IBM PC были собраны на отдельных микросхемах. Обычно в одну из микросхем набора входят также часы реального времени с CMOS-памятью и иногда – клавиатурный контроллер, однако эти блоки могут присутствовать и в виде отдельных чипов. В последних разработках в состав микросхем наборов для интегрированных плат стали включаться и контроллеры внешних устройств.
Внешне микросхемы Chipset'а выглядят, как самые большие после процессора, с количеством выводов от нескольких десятков до двух сотен.
Тип набора микросхем определяет основные функциональные возможности платы: типы поддерживаемых процессоров, структура/объем кэша, возможные сочетания типов и объемов модулей памяти, поддержка режимов энергосбережения, возможность программной настройки параметров и т.п. На одном и том же наборе может выпускаться несколько моделей системных плат, от простейших до довольно сложных с интегрированными контроллерами портов, дисков, видео и т.п.
Главными структурными элементами системной платы являются северный и южный мосты.
Северный мост служит для скоростной связи между процессором, оперативной памятью и видеоадаптером, подключенным к высокоскоростной шине (PCI-E или AGP).
Южный мост предназначен для связи с контроллерами портов и периферийных устройств. Также на южном мосте находится BIOS и контроллеры устройств ввода-вывода (I/O, Input/Output devices).
Мосты соединены между собой внутренней шиной, которая обеспечивает связь процессора с периферийными устройствами.
Структурная схема современной системной платы представлена на рис. 1.
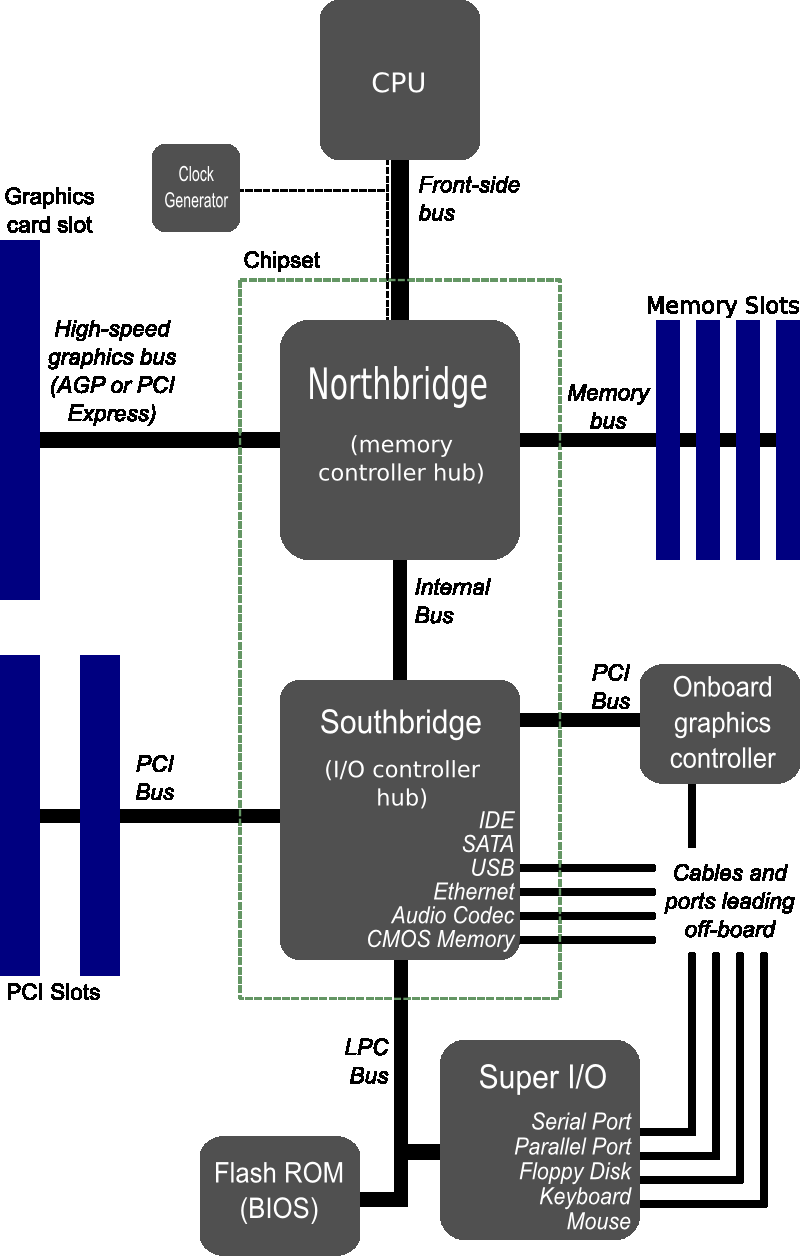
Рис. 1. Структурная схема современной системной платы.