

Охарактеризуйте устройство и работу индукционных датчиков
Действие индукционного датчика основано на изменении индуктивных связей между его обмотками при смещении подвижных элементов магнитопровода. Существует много разновидностей их датчиков, но наиболее распространен дифференциальный трансформаторный датчик (рис. 4.3). На полюсных выступах неподвижной части магнитопровода 1 такого датчика расположены обмотка возбуждения 3 и сигнальные обмотки 2 и 4, с которых снимается выходное напряжение. Измеряемое перемещение воздействует на подвижную часть магнитопровода 5.
Когда магнитопровод находится в среднем положении, магнитный поток, создаваемый катушкой 3, наводит в обмотках 2 и 4 равные ЭДС; поскольку эти катушки соединены встречно, на выходе датчика сигнала в этом случае нет. При смещении подвижной части магнитопровода ЭДС в одной из сигнальных катушек увеличивается, а в другой — уменьшается, и на выходе появляется сигнал, равный разности этих ЭДС.
Индукционные датчики по принципу действия на три вида:
1. Датчики экранирующего действия вихревых токов основаны на принципе изменения индуктивности катушки, если в создаваемое катушкой высокочастотное магнитное поле вносится проводник. При этом в проводнике создаются вихревые токи, ослабляющие основное магнитное поле катушки, а следовательно, и ее индуктивность. Датчики экранирующего действия вихревых токов реагируют на появление и исчезновение предметов, выполненных из проводящего материала и появляющихся в поле катушки.
2. Датчики взаимного расположения катушек имеют относительно высокую чувствительность и линейность характеристик. Датчики такого типа преобразуют линейные перемещения в изменения ЭДС. Например, ферродинамический датчик имеет подвижную обмотку, охватывающую участок магнитопровода с магнитным потоком противоположных направлений (рис. 24). При перемещении обмотки изменяется величина создаваемой в ней ЭДС и U2
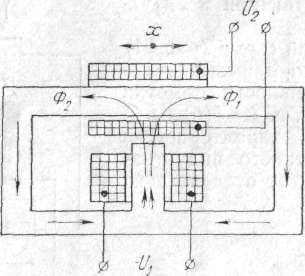
Рис.24
3. Датчики, использующие изменение коэффициента взаимной индукции между обмотками (трансформаторные датчики). Существует много разновидностей датчиков такого типа, однако, их можно свести в три основные группы: датчики с перемещающимися якорем, датчики перемещающейся обмоткой, датчики с поворотной обмоткой. Отличия между датчиками той или иной группы состоят в способе изменения коэффициента взаимной индукции между первичной и вторичной обмотками.
Датчики с поворотной обмоткой являются наиболее распространенной группой индукционных датчиков. Изменение взаимной индуктивности между первичной и вторичной обмотками в этих датчиках осуществляется благодаря повороту вторичной обмотки относительно первичной (рис. 25).
Р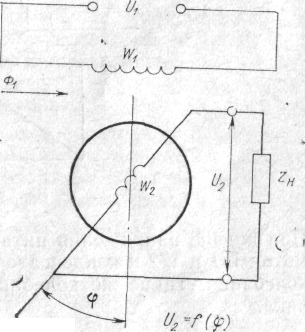 ис.25
ис.25
Такие датчики широко применяются для преобразования угловых перемещений в электрические величины. К индукционным датчикам относятся тахогенераторы — устройства, преобразующие скорость вращения первичного вала в напряжение. При вращении якоря в магнитном поле полюсов в обмотке якоря индуктируется ЭДС.
Е=к·Φ·ω
где к — конструктивный коэффициент; Φ— поток возбуждения; ω — угловая скорость якоря.
В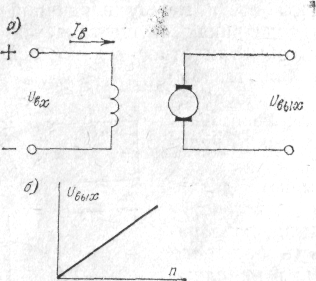 еличина
ЭДС находится в прямо пропорциональной
зависимости
от числа оборотов.
Тахогенераторы переменного тока по
устройству аналогичны
двухфазным асинхронным электродвигателям
с короткозамкнутым ротором (рис. 26).
Тахогенераторы такого типа имеют обмотку
возбуждения и рабочую обмотку, в которой
наводится ЭДС при вращении ротора.
Амплитуда ЭДС пропорциональна
скорости вращения.
еличина
ЭДС находится в прямо пропорциональной
зависимости
от числа оборотов.
Тахогенераторы переменного тока по
устройству аналогичны
двухфазным асинхронным электродвигателям
с короткозамкнутым ротором (рис. 26).
Тахогенераторы такого типа имеют обмотку
возбуждения и рабочую обмотку, в которой
наводится ЭДС при вращении ротора.
Амплитуда ЭДС пропорциональна
скорости вращения.
Рис.26