

Коррекционный механизм км-5
Назначение и принцип действия
Коррекционный механизм КМ-5 предназначен для:
– связи магнитоиндукционного датчика ИД-3 с гироагрегатом ГА-3 и каналом гиромагнитного курса в указателе КУШ-1;
– устранения четвертной девиации и инструментальных погрешностей с помощью лекального устройства;
– ввода магнитного склонения;
– приведения в полете магнитного курса к ортодромическому, путем введения магнитного (истинного) путевого угла ортодромии.
Коррекционный механизм КМ-5 приведен на рис.19, вид прибора без кожуха-—на рис.20.
Рис.19 Коррекционный механизм КМ-5 |
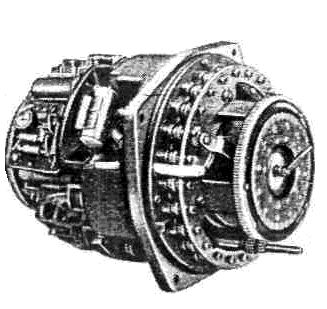
Рис.20 Коррекционный механизм КМ-5 без кожуха |
В коррекционном механизме установлены два сельсина, из которых один служит для согласования ротора этого сельсина с положением чувствительного элемента датчика ИД-3 по отношению к направлению горизонтальной составляющей магнитного поля Земли, а второй сельсин служит для передачи на гироагрегат ГА-3 сигналов курса, принятых с датчика ИД-,3 и откорректированных с помощью лекала и кремальеры в коррекционном механизме.
В коррекционном механизме также расположен усилитель УКМ, выполненный на полупроводниках и предназначенный для усиления сигналов рассогласования первой следящей системы: «датчик ИД-3 – коррекционный механизм КМ-5 (первого канала). Сигналы рассогласования, снимаемые с ротора сельсина-трансформатора, после усиления и преобразования, по частоте, поступают на управляющую обмотку двигателя ДИД-0,5ТА, который через редуктор, расположенный также в коррекционном механизме, отрабатывает ротор сельсина до положения, согласованного с чувствительным элементом индукционного датчика.
КМ-5 преобразует электрический сигнал индукционного датчика в угол поворота вала двигателя, связывает индукционный датчик с курсовым гироскопом, устраняет четвертную девиацию с одновременной компенсацией погрешностей индукционного датчика и следящей системы ИД–КМ.
Компенсация четвертной девиации и инструментальных погрешностей осуществляется в коррекционном механизме специальным электромеханическим коррекционным устройством лекального типа, называемым лекальным корректором (рис.21). Рассмотрим его работу.
Двигатель М1 приводящий ротор сельсина-приемника М2 в согласованное положение, должен перемещать и щетки 9 потенциометра 10. Ротор двигателя соединен со щетками потенциометра не жестко, а через специальный лекальный механизм, который состоит из гибкой металлической ленты 2 и ролика 4, находящегося в контакте с лентой. Ролик 4 укреплен на рычаге 6, жестко связанном с валом двигателя М1. Таким образом, при перемещении ролика (что показано стрелкой на рис.21) с помощью гибкой ленты 8 и пружины 7 поворачиваются щетки 9 потенциометра 10 на некоторый угол. Таким образом, поворот щеток потенциометра складывается из суммы двух движений: от двигателя М1 (основное движение) и дополнительно – за счет перемещения ролика. Ролик 4 с рычагом 6 совершает движение вместе с осью 11. Ввиду того, что гибкая лента 2 может иметь сложный профиль, который создается поджатием двадцати четырех регулировочных винтов 1, угол поворота щеток потенциометра в определенных положениях корректируется.
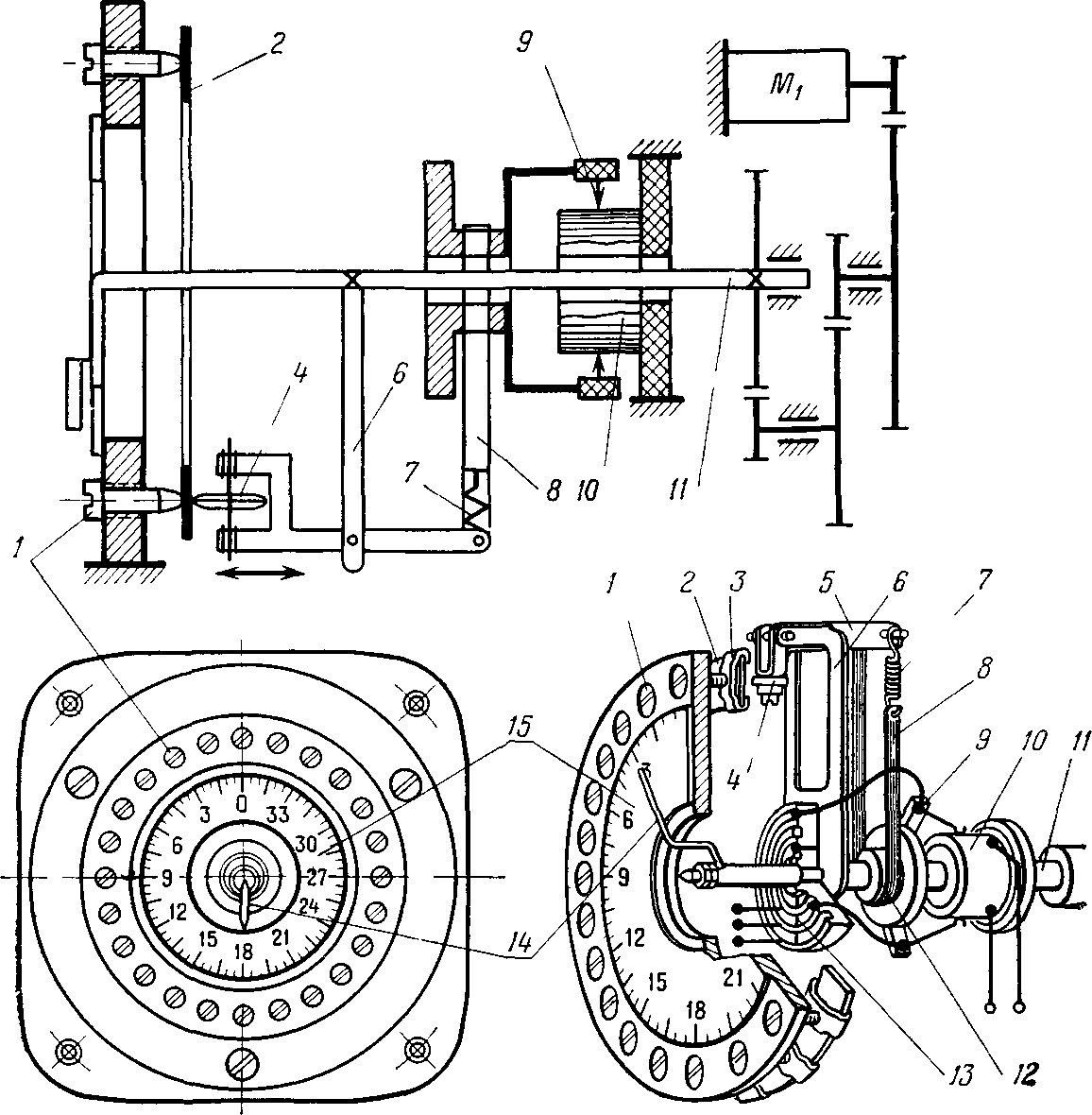
Рис.21 Кинематическая схема лекального корректора и внешний вид коррекционного механизма: 1–регулировочный винт; .2–профильная лента; 3–скоба; 4–ролик; 5–вилка,; 6–рычаг; 7–пружина; 8–лента; 9–щеткодержатель; 10–потенциометр; 11–ось; 12–муфта; 13–коллектор; 14–стрелка; 15–шкала.
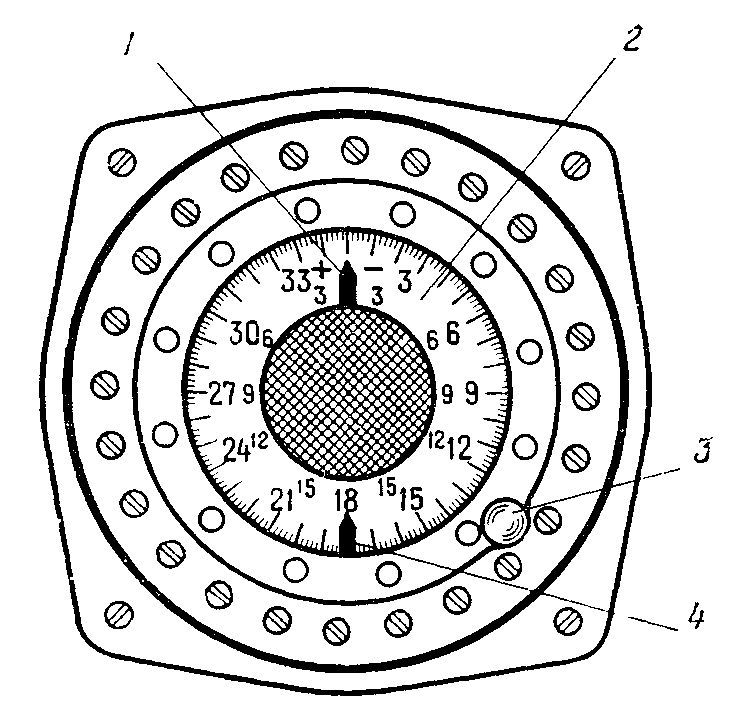
Рис.22 Лицевая сторона коррекционного механизма КМ-51–стрелка; 2–шкала; 3–кремальера; 4–индекс
На лицевой стороне (рис.22) коррекционного механизма имеется кремальера 3, с помощью которой по индексу 4 и шкале 2 устанавливаются значения магнитного и условного склонений. Стрелка 1 коррекционного механизма показывает компасный курс индукционного датчика.
Основные технические данные
Лекальное устройство обеспечивает устранение четвертной девиации и инструментальных погрешностей точной курсовой системы в пределах…………±5°
Внимание! Превышение величины 5° недопустимо, так как может привести к разрушению лекального устройства
Нестабильность работы коррекционного механизма в диапазоне температур внешней среды от +50 до –60" С 1°
Скорость согласования в механизме…………………………..не менее 5º/сек
Прибор виброустойчив и вибропрочен при перегрузках от вибрации:
при частоте от 10 до 30 Гц с амплитудой смещения…………не более 0,6 мм
при частоте от 30 до 200 Гц с перегрузкой от ускорения, изменяющегося линейно в этом диапазоне частот……………………………от 1.8g до 3,5g
Прибор допускает ударные перегрузки от ускорения 4g при частоте 40–100 ударов в минуту.
Общее количество ударов 10000
Рабочий диапазон температуры внешней средь……………от –60 до +50°С
Напряжение питания коррекционного механизма и усилителя, встроенного в него:
по переменному току…………….36 В±5% 400 Гц±2%
по постоянному току……………..27 В±10%
Вес…………………не более 2700 г