

ЛАБОРАТОРНАЯ РАБОТА
Исследование точной курсовой системы типа ткс–п
Цель работы: изучить назначение, принцип построения и состав точной курсовой системы типа ТКС–П; исследовать ее основные свойства и режимы работы.
ЗАДАНИЕ
Изучить принцип построения и состав системы. Начертить структурную схему и записать основные технические данные системы.
Определить время готовности системы в различных режимах.
Исследовать работу системы в различных режимах.
НАЗНАЧЕНИЕ
Курсовая система типа ТКС служит для определения курса самолета и обеспечения сигналами курса как индикаторов курса летчика и штурмана, так и всех самолетных устройств, решающих задачи навигации, пилотирования и другие, для работы которых требуются сигналы курса. Система типа ТКС является централизованным самолетным устройством, объединяющим гироскопические, магнитные и астрономические средства определения курса.
В комплектации ТКС-П при работе с измерителем угла сноса и путовой скорости, автоматическим радиокомпасом, навигационным вычислителем курсовая система обеспечивает индикацию соответственно угла сноса, пеленга радиостанции и значений заданного и фактического путевых углов самолета.
Курсовая система ТКС предназначена к установке на самолеты пассажирской и транспортной авиации.
Курсовые гироскопы системы ТКС могут работать в одном из следующих режимов:
– гирополукомпаса ГПК;
– астрокоррекции АК;
– магнитной коррекции МК.
Основным режимом работы ТКС является режим гирополукомпаса, при котором система выдает ортодромический курс самолета, контролируемый и периодически (кратковременно) корректируемый по сигналам магнитных, астрономических и радиолокационных средств, выбираемых в зависимости от условий полета. Кроме того, ТКС непрерывно выдает значение гиромагнитного курса.
Для обеспечения нормальной работы система должна получать электрические сигналы, пропорциональные:
– крену самолета;
– угловой скорости разворота (ограничения);
– истинному или ортодромическому курсу от дистанционных астрокомпасов или звездно–солнечного ориентатора;
– синусу широты места – от бортового вычислителя (для автоматической компенсации влияния вращения Земли);
– заданному путевому углу (ЗПУ);
– углу сноса самолета;
– курсовому углу радиостанции.
При отсутствии датчиков ЗПУ и синуса текущей широты указанные величины вводить вручную.
КОМПЛЕКТНОСТЬ
Индукционный датчик (ИД–3) – 1шт.
Коррекционный механизм (КМ–5) –1 шт.
Гироагрегат (ГА–3) – 2 шт.
Указатель штурмана (УШ–3) – 1 шт.
Контрольный указатель штурмана (КУШ–1) – 1 шт.
Пульт управления (ПУ–11) – 1 шт.
Распределительный блок (РБ–2) – 1 шт.
Задатчик курса (ЗК–4) – 1 шт.
Блок пеленгов (БП–5) – 1 шт.
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ ТКС-П
1. Погрешность системы в режиме ГПК в нормальных условиях:
в районе ±20º от широты места выполнения
последней балансировки системы................................................................................0,6º/час
в диапазоне широт места ±90º......................................................................................0,8º/час
2. Погрешность при определении гиромагнитного курса (без учета погрешности дистанционной передачи потребителю):
по курсовому сельсину гироагрегатов.......................................................1º
по сельсину гиромагнитного курса КУШ-1..................................................1º
3. Режимы работы системы:
гирополукомпаса ГПК длительно
магнитной коррекции МК и астрокоррекции АК кратковременно
4 мин при каждой коррекции гироскопов
4. Погрешность в указании гиромагнитного курса:
по указателю КУШ-1 (стрелка «К»)..........................................................1,5º
по указателю КУШ-1 (стрелка «1»).........................................................1,0º
по указателю УШ-3 (стрелка «К»)...............................................................1,5º
5. Погрешность дистанционной передачи при коррекции курсового сельсина гироагрегата от астросистемы:
по «грубому» каналу...................................................................30´
по «грубо-точному» каналу..............................................................8´
6. Погрешность сельсинных дистанционных передач курсовых сигналов системы:
по «грубому» каналу..................................................................................30´
по «грубо-точному» каналу..........................................................................8´
7. Допустимые рабочие углы:
по крену....................................................................................................55º
по тангажу......................................................................................................40º
8. Погрешность индикации по указателям системы не превышает:
заданного путевого угла............................................................................0,5º
путевого угла.............................................................................................1,0º
пеленг радиостанции....................................................................................2,5º
9. Дополнительная погрешность в режиме ГПК на каждую минуту действия линейных или виражных ускорений, а также при наборе высоты, снижении .не более 0,02º
10. Рабочий диапазон температуры окружающей среды.......................................от +50 до -60ºС
11. Высотность.....................................................................................................30000 м
12. Время готовности системы:
в режиме МК и АК...........................................................................................5 мин
в режиме ГПК..............................................................................................10 мин
13. Напряжение и частота источников питания:
в цепях питания трехфазным переменным током.....................................................36 В±5%
с частотой.............................................................................................400 Гц±2%
в цепях питания постоянным током.......................................................27 В±10%
14. Потребляемая мощность:
по переменному то…………………………………………не более 200 ВА
в пусковом режиме не более 300 ВА
по постоянному току (без обогрева) не более 90 Вт
мощность обогрева (кратковременно) не более 600 Вт
15. Время непрерывной работы 20 час.
16. Вес ТКС-П 44 кг
ПРИНЦИП ДЕЙСТВИЯ
Система типа ТКС является разновидностью курсовых систем и принцип действия ее в основном аналогичен принципу действия курсовых систем типа КС.
Курсовая система является комплексом взаимосвязанных устройств (магнитных, гироскопических, астрономических и радиотехнических) и, как основную, решает задачу выдерживания ортодромического курса самолета (работа курсовой системы в режиме ГПК). При этом начальная выставка ортодромического курса и его периодическая корректировка осуществляется либо с помощью магнитной коррекции (МК) по сигналам индукционного датчика ИД, измеряющего направление горизонтальной составляющей вектора магнитного поля Земли, либо по сигналам астродатчика, определяющего истинный или ортодромический курс по положению небесных светил: Солнца или звезд.
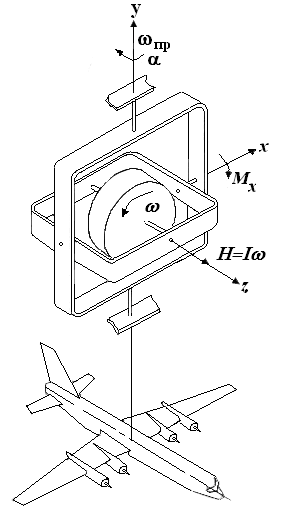
Рис.1 Схема курсового гироскопа (цепи коррекции не показаны)
![]() –главная
ось гироскопа;
–главная
ось гироскопа;
![]() и
и
![]() –оси
прецессии гироскопа;
–оси
прецессии гироскопа;
![]() –кинетический
момент гироскопа;
–кинетический
момент гироскопа;
![]() –момент
инерции ротора гироскопа;
–момент
инерции ротора гироскопа;
![]() –угловая
скорость вращения ротора гироскопа;
–угловая
скорость вращения ротора гироскопа;
![]() –внешний
момент силы, действующей относительно
оси
;
–внешний
момент силы, действующей относительно
оси
;
![]() –угловая
скорость прецессии относительно оси
–угловая
скорость прецессии относительно оси
Принцип работы курсовой системы в режиме магнитной коррекции, основан на сочетании курсового гироскопа (рис. 1) и прибора, измеряющего направление горизонтальной составляющей магнитного поля Земли – чувствительного элемента. Указанное сочетание используют для получения стабильных показаний магнитного курса (называемого обычно гиромагнитным). Курсовой гироскоп в данной схеме является элементом, обеспечивающим мгновенное и устойчивое показание курса, отфильтрованного от высокочастотных помех чувствительного элемента электромеханическим или гироскопическим фильтром. Это позволяет в реальных условиях полета обеспечить точность измерения магнитного курса, примерно соответствующую статической точности чувствительного элемента, так как медленно нарастающая погрешность гироскопа выбирается корректирующим (фильтрующим) устройством.
Курсовая система ТКС по своей структуре является универсальным датчиком курса, входящим в комплекс навигационно-пилотажного оборудования самолета.
Система ТКС в навигационно-пилотажном комплексе самолета позволяет с высокой точностью на маршруте производить счисление пути, обеспечивая значение точного курса, необходимого для раскладки вектора путевой скорости. Система также обеспечивает выдачу курса, необходимого для построения захода на посадку в районе аэродрома.
Ввиду того, что полет по ортодромии обладает рядом преимуществ (точностных и методических) по сравнению с полетом по локсодромии, а также и в силу того, что на больших скоростях (при М>1) определение курса с достаточной степенью точности возможно лишь в режиме ГПК (ввиду свойственной чувствительному элементу, индукционному датчику, так называемой скоростной девиации и определенных ограничений при работе астрокомпасов), основным назначением ТКС является определение ортодромического курса самолета, точность которого определяется дрейфом курсового гироскопа, ошибкой его начальной выставки и точностью коррекции в полете.
Повышенная точность «хранения» ортодромического курса, высокая инструментальная точность начальной выставки и коррекции гироскопов, возможность контроля за точностью ортодромического курса, а также наличие индикации текущего путевого угла в комплектации ТКС–П отличает систему ТКС от других курсовых систем.
СТРУКТУРНАЯ СХЕМА ТКС–П
Один из гироскопов (см рис. 2) назван основным. Он выдает сигнал курса всем потребителям и на указатель (основной) штурмана УШ–3, индицирующий значение текущего курса самолета.
Второй гироскоп при нормальном режиме работы системы свободен от внешних потребителей курса и назван «контрольным». Он выдает курс на контрольный указатель штурмана КУШ-1.
Таким образом, показания курса, выдерживаемого основным и контрольным гироскопами, индицируются на независимых друг от друга указателях штурмана.
Смысл
такого построения схемы заключается в
следующем. Перед полетом, на Земле, оба
гироскопа выставляют на одно и то же
исходное значение гироскопического
курса, которое, в общем случае, может не
совладать c
истинным (магнитным) курсом самолета.
Эта операция (начальная выставка)
обеспечивает привязку гироскопического
курса к магнитному.(истинному) меридиану,
который определяется магнитным (истинным)
путевым , углом
ортодромии
![]() (
(![]() ),
отсчитываемым
от меридиана, если направление ортодромии
выбрано совпадающим с направлением
меридиана в месте вылита, то
при выставке курсовой системы равен
нулю. Разность истинных путевых углов
ортодромии при изменении долготы полета
равна углу сходимости меридианов
),
отсчитываемым
от меридиана, если направление ортодромии
выбрано совпадающим с направлением
меридиана в месте вылита, то
при выставке курсовой системы равен
нулю. Разность истинных путевых углов
ортодромии при изменении долготы полета
равна углу сходимости меридианов
![]() .
.
Как правило, следует производить выставку гироагрегатов относительно истинного (начального) меридиана места выставки. Тогда при движении по выбранной ортодромии должен выдерживаться ортодромический курс (при отсутствии сноса), численно равный ( ). В этом случае значение ортодромического курса отличается от истинного курса ИК самолета на величину . Значение измеренной в полете разности ОК и ИК с расчетной величиной позволяет контролировать точность гироскопического курса.

Рис.2 Структурная схема курсовой системы ТКС–П
ИД–3 – индукционный
датчик; КМ–5 – коррекционный механизм;
ГА–3 – гироагрегат; УШ–3 – указатель
штурмана; КУШ–1 – контрольный указатель
штурмана; ЗК–4 – задатчик курса; ПУ–11
– пульт управления; БП–5 – блок пеленгов;
АРК – радиокомпас; ЦГВ – центральная
гировертикаль; АК – астрокомпас; НВ –
навигационный вычислитель; ИС –
измеритель угла сноса;
![]() – склонение;
– склонение;
![]() – сигнал угла крена; К – курс; ИК –
истинный курс; МК – магнитный курс;
– сигнал угла крена; К – курс; ИК –
истинный курс; МК – магнитный курс;
![]() – угловая скорость вращения Земли;
– угловая скорость вращения Земли;
![]() – широта места; УС – угол сноса; ГМК –
гиромагнитный курс; КУР – курсовой угол
радиостанции; ЗПУ
– заданный путевой угол.
– широта места; УС – угол сноса; ГМК –
гиромагнитный курс; КУР – курсовой угол
радиостанции; ЗПУ
– заданный путевой угол.
Выставку курсовой системы можно осуществлять, используя систему коррекции гироагрегатов.
Система коррекции выполнена так, что в каждый момент может быть использован лишь один вид коррекции, накладываемый на основной или контрольный гироагрегат. При этом другой гироагрегат, работает в режиме ГПК. Управление коррекцией осуществляется с пульта управления системы, на котором расположены соответствующие переключатели. Система имеет следующие виды коррекции:
1. Магнитную коррекцию, осуществляемую по сигналам индукционного магнитного датчика ИД-3 через коррекционный механизм КМ-5, в который может быть введена поправка на магнитный путевой угол ортодромии. Точность магнитной коррекции 1° при условии, что магнитная девиация тщательно устранена.
2. Астрокоррекцию, предназначенную для коррекции гироагрегатов, по сигналам от астродатчика, а также для наземной выставки гироскопов, используя задатчик курса ЗК-4. Инструментальная точность коррекции этого канала составляет 8 угловых минут. Общая точность выставки курса зависит or точности работы датчика астрокурса или от точности определения курса полета на земле.
3. Для выставки системы можно использовать также работу системы в режиме «курсозадатчика». Этот режим обеспечивает возможность -принудительной выставки значения заданного курса на любом гироагрегате. Скорость изменения курса при этом составляет 2–3°/сек при точности установки на требуемый курс 0,5°.
После выставки основного и контрольного гироагрегатов на указателях системы устанавливаются одинаковые показания курса. В полете расхождение показаний курса по указателям штурмана УШ-3 и КУШ-1 на величину более 1° за час означает (при равномерном прямолинейном полете), что гироскопы системы работают с завышенными уходами.
Для проверки точности (дрейфа) гироскопов системы необходимо определить погрешность гироскопического курса каждого гироагрегата. Эту операцию следует производить по контрольному указателю штурмана, который, кроме стрелки ортодромического курса, имеет еще одну стрелку, показывающую, в зависимости от положения переключателя указателя, гиромагнитный курс или курс от астрокомпаса. Эта стрелка может указывать также пеленг радиостанции (по сигналам АРК).
Сравнение показаний стрелки ортодромического (гироскопического) курса с приведенным гиромагнитным (стрелка «1» указателя КУШ-1) следует выполнить, введя в КМ-5 необходимую величину магнитного путевого угла ортодромии, а сравнение с астрокурсом следует производить, когда астрокомпас определяет курс в ортодромической системе координат.
Расхождение ортодромического курса с показаниями стрелки «1» указывает, какой гироагрегат основной или контрольный, имеет повышенную погрешность в измерении курса и нуждается в коррекции. Это же сравнение позволяет выбрать наиболее целесообразный режим коррекции (МК или АК). Однако включать коррекцию рекомендуется лишь при рассогласовании более 1°—2° с астродатчиком и 2°—3° с магнитным датчиком.
Схема построена таким образом, что все операции по определению погрешности курса не связаны с вмешательством в сигнал ортодромического курса основного или контрольного гироагрегатов, что исключает как влияние этой операции на потребителей курса (особенно на автопилот), так и опасность изменить первоначально выставленное значение курса. Лишь после того как штурман полностью убедится в необходимости коррекции, следует ввести коррекцию курса в тот или другой гироагрегат. При этом поправка вводится автоматически (переключателем режимов работы на пульте управления) с малой скоростью, без нажатия на кнопку согласования.
Наличие двух независимых гироагрегатов позволяет также осуществить резервирование системы.
Например, если обнаружатся чрезмерно большие ошибки (более 2—5°/час) от ухода гироскопа основного гироагрегата, которые могут быть вызваны какой-либо частичной неисправностью гироскопа, то основной гироскоп не корректируется, а потребители и основной указатель штурмана переключаются на контрольный гироагрегат.
При этом контрольный указатель штурмана переключается на основной гироагрегат. Система в этом случае работает как одноканальная, но стрелка «1» контрольного указателя по-прежнему, если переключатель КУШ-1 установлен в положение «МК», показывает значение гиромагнитного курса.
На указатель штурмана УШ-3, кроме сигнала гироскопического курса, поступают также сигналы заданного путевого угла ЗПУ или заданного курса ЗК от навигационного вычислителя НВ и угла сноса УС от измерителя угла сноса. При этом на указателе индицируются значения заданного путевого угла ЗПУ (или ЗК), гироскопического курса К, текущего (фактического) путевого угла ФПУ и угла сноса УС как разности между значениями текущего путевого угла и курса.
На рис.3 приведены пояснения к параметрам, индицируемым на УШ-3. При отсчетах курса от начального меридиана и при отсчете курса от произвольно выбранной ортодромии, положение которой относительно меридиана определяется значением путевого угла ортодромии, разница между ЗПУ и ФПУ есть угол доворота для движения самолета по линии заданного пути.
Примечание. Ортодромия, используемая для отсчета курса, может не совпадать с ортодромией, используемой для счисления ортодромических координат места самолета.
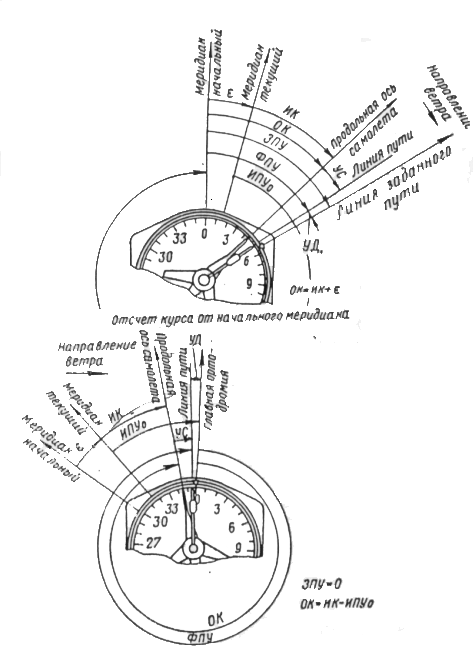
Рис.3 Пояснения к параметрам, индицируемым на указателе УШ-3:
ОК –
ортодромический курс; ФПУ – фактический
путевой угол: ЗПУ – заданный путевой
угол;
УС – угол сноса; ИК – истинный
курс;
![]() – начальный путевой угол ортодромии;
– начальный путевой угол ортодромии;
![]() – истинный путевой
угол ортодромии; УД—угол доворота
– истинный путевой
угол ортодромии; УД—угол доворота
Курсовая система ТКС, аналогично системам типа КС, имеет связь с центральной самолетной гировертикалью ЦГВ по каналу крена, обеспечивающей стабилизацию гироскопов по крену в плоскости горизонта.
Ввод широтной поправки на гироскопы ТКС (на вертикальную составляющую скорости вращения Земли), называемой шпротной коррекцией, может осуществляться как автоматически, так и вручную.
На рис.4 приведен график, показывающий величины дополнительных погрешностей системы при определении ортодромического курса за час полета в режиме ГПК при неточном вводе широты места (с погрешностью 0,5°, 1° и т. д.) в систему широтной коррекции.
Расчеты показывают, что для того, чтобы дополнительная погрешность .была не более 0,1° за час полета при современных скоростях самолетов необходимо широтную поправку вводить с интервалом не более ±0,25°, т. е. через каждые 3–4 минуты полета, что практично может быть осуществлено автоматически.
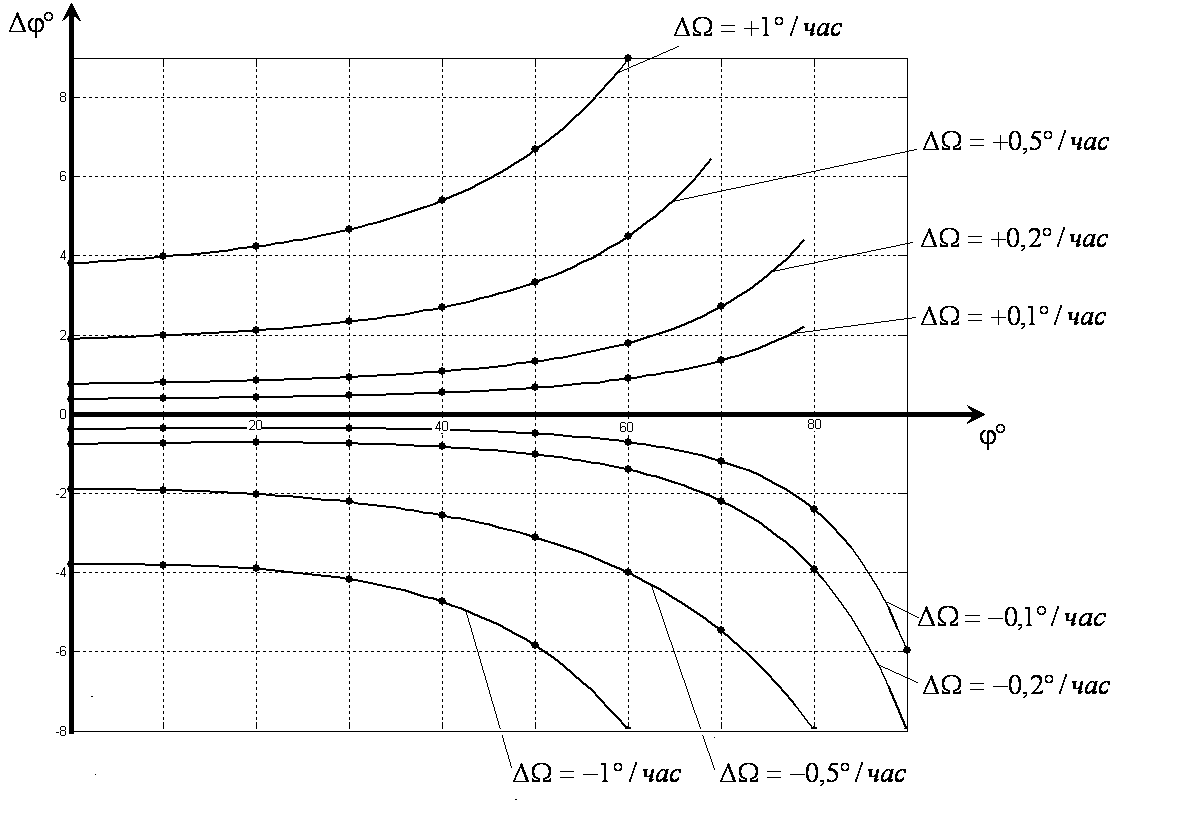
Рис.4 Графики погрешности; гирополукомпаса от неточного ввода широты места:
– широта места;
![]() – погрешность
ввода широты;
– погрешность
ввода широты;
![]() – погрешность от
неточности ввода широты
– погрешность от
неточности ввода широты
Формирование
ручного ввода сигнала, пропорционального
величине
![]() ,
производится в пульте управления
системы, а для автоматического— в
специальном блоке, входящем в состав
бортового вычислителя.
,
производится в пульте управления
системы, а для автоматического— в
специальном блоке, входящем в состав
бортового вычислителя.
Индукционный датчик ИД-3 обеспечивает коррекционный механизм КМ-5 сигналом магнитного курса, с коррекционного механизма снимается значение магнитного курса для коррекции гироскопа и формирования гиромагнитного курса в КУШ-1 (или истинного курса при введенном магнитном склонении).
При вводе ( ) или величины КМ-5 выдает значение ортодромического курса.
Гироагрегаты системы представляют собой трехстепенные ориентированные в азимуте астатические гироскопы, расположенные в дополнительной раме, стабилизированной по крену в плоскости горизонта при помощи сельсинной следящей системы от полетной гировертикали. Стабилизация курсового гироскопа по крену устраняет возникновение карданных погрешностей.
Сигнал курса снимается с сельсина, одна часть которого (ротор) жестко закреплена на измерительной оси гироскопа, а другая (статор) может приводиться во вращение относительно корпуса прибора двигателем M1 через редуктор с электромагнитной муфтой ЭМ.
Для обеспечения возможности работы курсового астатического гироскопа в качестве датчика ортодромического курса необходимо вводить коррекцию, обеспечивающую компенсацию вертикальной составляющей вращения Земли. Эта коррекция зависит от широты места и поэтому ее принято называть широтной. Коррекцию «свободного» гироскопа в азимуте по сигналам различных датчиков курса принято называть азимутальной.
Азимутальная и широтная коррекции гироагрегата осуществляются одним и тем же азимутальным двигателем M1, разворачивающим статор курсового сельсина. Коррекция гироагрегата на вращение Земли (широтная коррекция) осуществляется в режиме ГПК.

Рис.5. Принципиальная схема стабилизации курсового гироскопа по крену:
1 –
курсовой гироскоп; 2 – дополнительная
рама гироскопа; 3
–
ротор
сельсина-приемника;
4
– статор
сельсина-приемника; 5—ротор
сельсина-датчика гировертикали; 6 –
статор сельсина-датчика гировертикали;
7 – усилитель; 8 – корпус гироагрегата;
9 – двигатель отрабатывающий: 10
– обмотка
возбуждения; 11 – управляющая обмотка;
12
–
редуктор:
13
– зубчатый
сектор;
![]() –оси самолета
–оси самолета
Азимутальный двигатель Ml гироагрегата в этом режиме управляется через специальный усилитель (усилитель широтной коррекции) по сигналам с широтных потенциометров, расположенных в пульте управления (на схеме не показаны) или в навигационном вычислителе. Двигатель M1 работает в режиме интегрирующего привода, обеспечивая точный ввод поправок вращением статора курсового сельсина.
Режим азимутальной коррекции определяется положением переключателя В2, расположенного на лицевой стороне пульта управления. Режимом работы усилителя и двигателя M1l управляет реле азимутальной коррекции того пли другого гироагрегата в зависимости от того, запитано или обесточено реле РЗ, расположенное в распределительном блоке РБ-2.
Нормально-замкнутые контакты реле азимутальной коррекции определяют работу усилителя в режиме широтной коррекции. При этом статор курсового сельсина разворачивается с такой же скоростью, как и корпус гироагрегата, вращающийся вместе с Землей, но в обратную сторону.
Усилитель с реле азимутальной коррекции укреплен на корпусе гироагрегата.
РАБОТА СИСТЕМЫ В РАЗЛИЧНЫХ РЕЖИМАХ
Режим гирополукомпаса (ГПК)
Переключатель режимов работы пульта управления стоит в нейтральном положении (ГПК). При этом реле азимутальной коррекции обесточены. Двигатели M1 обоих гироагрегатов вращаются со скоростью, пропорциональной сигналу, задаваемому с пульта, т. е. осуществляется работа гироагрегатов в режиме ГПК.
Режим магнитной коррекции (МК)
Любая азимутальная (кроме широтной) коррекция может быть внесена лишь на один гироагрегат, что определяется реле Р3, P6, Р7 блока PБ-2. Управление этими реле осуществляется от переключателя В4 пульта управления, обозначенного «Коррекция».
В рабочем положении В4 стоит в положении «Контр.», реле Р3, Р6, Р7 блока РБ-2 обесточены и их нормально-замкнутые контакты обеспечивают возможность коррекции только контрольного гироагрегата.
Для осуществления магнитной коррекции контрольного гироагрегата необходимо переключатель В2 пульта управления установить в положение «МК». При этом +27 В через нормально-замкнутый контакт выключателя коррекции ВК-53РБ и нормально-замкнутый контакт реле РЗ попадает .на реле азимутальной коррекции контрольного гироагрегата, которое соединяет вход усилителя контрольного гироагрегата через нормально-разомкнутый контакт с ротором M1 коррекционного механизма КМ-5.
Реле Р13. блока РБ-2, на которое также подано напряжение + 27 В, подключает статор того же сельсина КМ-5 к статору контрольного гироагрегата. Таким образом, образуется следящая система «контрольный гироагрегат — коррекционный механизм» и сельсин-датчик гироскопа согласовывается по магнитному курсу по сигналам с ротора сельсина-приемника КМ-5. Так как это согласование происходит с малой скоростью 1–1,3°/мин, то с курсового сельсина-датчика гироагрегата в это время снимается осредненное, без колебаний показание магнитного курса, т. е. гиромагнитный курс. Если рассогласование велико (например, при начальной выставке системы),то согласование можно значительно ускорить нажатием кнопки Кн1 («Согл.») на пульте управления. При этом на электромагнитную муфту ЭМ-1 гироагрегата поступает +27 В и происходит переключение передаточного числа редуктора согласования. Скорость согласования при этом увеличивается до 2—3°/сек. Коррекция по магнитному курсу основного гироскопа происходит аналогично при установке В4 в положение «Осн.». Реле РЗ, Р6, Р7 при этом включены.
Режим астрокоррекции (АК)
Режим астрокоррекции образуется путем создания замкнутой следящей системы «гироскоп – астрокомпас». Реле азимутальной коррекции гироагрегата включено. Переключатель В2 пульта устанавливается в положение «АК», при этом на реле азимутальной коррекции подается напряжение +27 В через нормально-замкнутые контакты реле РЗ (если В4 в положении «Контр.») и реле Р8 блока реле РБ-2. В схеме заложен ряд особенностей, обусловленных тем, что в режиме астрокоррекции, в зависимости от схемы связи, осуществляется коррекция сельсина гироагрегата как по «грубому» каналу, так и по «грубо-точному». Поэтому усилитель азимутальной коррекции гироагрегата имеет два входа: «грубый» и «точный».
Управление входом усилителя в режиме астрокоррекции осуществляется реле Р8 блока реле, а реле Р9 определяет коммутацию статорных концов (по «грубо-точному» каналу) следящей системы астрокоррекции так, что астрокомпас при работе системы ТКС в режиме ГПК получает сигнал курса для стабилизации своего чувствительного элемента с основного гироагрегата. При включении режима астрокоррекции контрольного гироагрегата курсовой системы это реле подключает астрокомпас к контрольному гироагрегату.
Астрокомпас подключается к реле Р8 и Р9 не непосредственно, а через., задатчик курса ЗК-4 (представляющий собой сельсин-приемник с «грубо-точным» каналом и имеющий нониусную двухминутную шкалу) при установке переключателя В1 задатчика курса в положение «АК». Если B1 этого прибора поставить в положение «ЗК», то образуется следящая система «сельсин-гироагрегата – задатчик курса», с помощью, которой производится точная установка начального значения курса гироагрегатов перед взлетом. Значение курса, устанавливаемого в этом случае по шкале ЗК-4, определяется с помощью специальных методов или устройств.
После выставки В1 ставится в положение «АК» и остается в этом положении. При этом обеспечивается коррекция гироагрегатов от астрокомпаса, если В2 пульта управления установлен в положение «АК».
На схеме рис.6 показаны цепи коррекции гироагрегата по «грубому» каналу.
В режиме астрокоррекции. так же, как и в режиме магнитной коррекции, работает кнопка согласования на ПУ-11.

а


б

в
Рис.6 Схема грубо–точной коррекции
Режим курсозадатчика
В системе предусмотрен режим принудительного разворота статора курсового сельсина того пли другого гироагрегата (в зависимости от положения переключателя В4 на пульте управления).
Режим осуществляется усилителем азимутальной коррекции и двигателем Ml гироагрегата. При нажатии переключателя ВЗ на ПУ-11 вправо или влево сигнал с задающей обмотки трансформатора Тр 1 блока РБ-2 (той или другой фазы) поступает на вход усилителя через контакты реле PI, P4 блока РБ-2 и реле азимутальной коррекции, которые в это время получают питание +27 В.
Одновременно напряжение +27 В поступает на электромагнитную муфту соответствующего гироагрегата и разворот статора сельсина осуществляется с повышенной скоростью. Реле Р1 б пульте управления служит для того, чтобы режим курсозадатчика мог быть осуществлен лишь в режиме ГПК.(в режимах АК и МК с переключателя ВЗ снимается +27 В).
Режим широтной коррекции
Как уже указывалось выше, основным режимом работы системы является режим гирополукомпаса. В этом режиме система выдает ортодромический курс с точностью, определяемой «дрейфом» гироскопа в азимуте и погрешностью его начальной выставки. Величина дрейфа в основном зависит от качества гироскопа гироагрегата и от точности ввода в гироскоп широтной поправки, вводимой для компенсации «кажущегося» ухода, вызываемого наличием вращения Земли (рис.7).
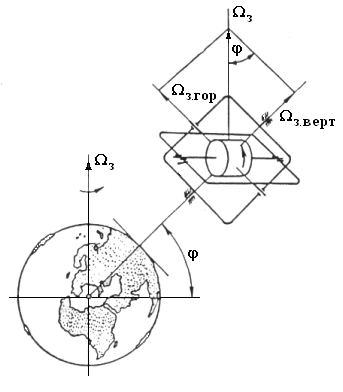
Рис.7 «Кажущийся» уход гироскопа:
![]() – угловая скорость
вращения Земли;
– угловая скорость
вращения Земли;
![]() – вертикальная составляющая угловой
скорости вращения Земли;
– вертикальная составляющая угловой
скорости вращения Земли;
![]() – горизонтальная составляющая угловой
скорости вращения Земли;
– горизонтальная составляющая угловой
скорости вращения Земли;
– широта места.
В ТКС имеется система ручного или автоматического ввода широтной коррекции. Система ручного ввода широтной коррекции (рассматривается на один гироагрегат) состоит из стабилизатора напряжения, блока широтных потенциометров R1, R2 (R3), расположенных в пульте управления, усилителя типа УШК. интегрирующего двигателя Ml (типа ИЭ-1М), редуктора и курсового сельсина гироагрегата МЗ (типа 913А), расположенных в гироагрегате.
Потенциометры Rl, R2 (R3) включены в мостовую схему, питаемую постоянным напряжением от малогабаритного полупроводникового стабилизатора.
Потенциометр R1 является задающим. Положение движка на нем находится в синусоидальной зависимости от широты места.
Широта места индицируется на шкале пульта и может устанавливаться в пределах 0°—90° как северной, так и южной широты. Потенциометр R2 для основного гироагрегата и потенциометр R3 для контрольного гироагрегата являются юстировочными, предназначенными для электрической компенсации постоянного разбаланса гироскопов. Управление этими потенциометрами выведено под шлиц на лицевую панель пульта.
Потенциометры R2, R3 названы балансировочными и вместе с R1 формируют управляющий широтный сигнал для основного и контрольного гироагрегатов соответственно.
Примерный характер сигнала, вырабатываемого блоком широтных потенциометров, представлен на рис. 8.

Рис.8 Характеристика сигнала коррекции, формируемого в пульте управления
Сформированный
сигнал со штырьков 18, 19 и 16, 17 разъема Ш1
пульта управления подается соответственно
на штырьки 5, 19 разъемов гироагрегатов.
Разность
![]() между
напряжением с пульта и напряжением,
снимаемым с тахогенератора интегрирующего
двигателя ИЭ-1М, подается на входные
штырьки 1, 2 штепсельного разъема усилителя
УШК., встроенного в гироагрегат. Этот
сигнал постоянного тока преобразуется
в переменный и через контакты реле
азимутальной коррекции поступает на
вход усилителя, усиливается и подается
на управляющую обмотку двигателя ИЭ-1М,
который развивает скорость, необходимую
для того, чтобы сигнал
стремился бы к нулю.
между
напряжением с пульта и напряжением,
снимаемым с тахогенератора интегрирующего
двигателя ИЭ-1М, подается на входные
штырьки 1, 2 штепсельного разъема усилителя
УШК., встроенного в гироагрегат. Этот
сигнал постоянного тока преобразуется
в переменный и через контакты реле
азимутальной коррекции поступает на
вход усилителя, усиливается и подается
на управляющую обмотку двигателя ИЭ-1М,
который развивает скорость, необходимую
для того, чтобы сигнал
стремился бы к нулю.
Таким образом, скорость вращения ИЭ-1M будет строго пропорциональна сигналу, поступающему с пульта управления.
На рис.9 представлена принципиальная схема системы широтной коррекции. Это схема так называемого интегрирующего привода постоянного тока. Выход этой системы – угол поворота
вала
интегрирующего двигателя ИЭ-1M
– пропорционален интегралу от входной
величины (опорного напряжения
![]() ).
).
Точность работы такой системы целиком зависит, при достабильности характеристики тахогенератора, которые для МЭ-1М не зависят от колебаний напряжения питания, так как магнитное поле тахогенератора ИЭ-1М создается постоянным магнитом. А так как питающее напряжение моста потенциометров стабилизировано, работа интегрирующего привода почти не зависит от колебаний напряжений, питающих усилитель, обмотку возбуждения двигателя интегратора и стабилизатора.
Рис.9 Схема системы широтной коррекции
ИЭ-1М –
двигатель–генератор; ТГ – тахогенератор;
УШК – усилитель широтной корекции; СН
– стабилизатор напряжения;
– широта места;
![]() – потенциометр широтной коррекции;
– потенциометр широтной коррекции;
![]() – сигнал питания потенциометра широтной
коррекции;
– сигнал питания потенциометра широтной
коррекции;
![]() - напряжение с тахогенератора;
- напряжение с тахогенератора;
![]() - входное напряжение усилителя;
- входное напряжение усилителя;
![]() - сигнал напряжения на входе моста;
- сигнал напряжения на входе моста;
![]() - балансирующий сигнал;
- балансирующий сигнал;
![]() - обмотка возбуждения двигателя;
- обмотка возбуждения двигателя;
![]() - управляющая обмотка двигателя;
- управляющая обмотка двигателя;
![]() - широтный сигнал;
- широтный сигнал;
![]() - балансировачный потенциометр.
- балансировачный потенциометр.
Вал ИЭ-1М через редуктор вращает статор курсового сельсина в сторону, противоположную вращению Земли, с угловой скоростью
![]() ,
,
где
величина
![]() – дрейф от действия постоянного
разбаланса. Величина
в общем случае различна для каждого из
гироагрегатов и лежит в пределах ±3
град/час.
Эта
величина компенсируется разворотом
балансировочных потенциометров и
определяет необходимость регулировки
гироагрегатов при их замене и при
проведении регламентных работ.
– дрейф от действия постоянного
разбаланса. Величина
в общем случае различна для каждого из
гироагрегатов и лежит в пределах ±3
град/час.
Эта
величина компенсируется разворотом
балансировочных потенциометров и
определяет необходимость регулировки
гироагрегатов при их замене и при
проведении регламентных работ.
Автоматическая система ввода широтной коррекции отличается лишь тем, что широтный потенциометр пульта управления R1 переключателем В1 этого пульта заменяется на точно такой же, но расположенный в навигационном вычислителе. Положение движка этого потенциометра автоматически меняется с изменением широты места.
Режим коррекции гироагрегатов
Для обеспечения выставки и коррекции гироагрегатов, согласование их показаний по заданному значению курса, предусмотрена система их коррекции, осуществляемая разворотом статора курсового сельсина-датчика гироскопа по корректирующим сигналам (азимутальная коррекция гироагрегатов).
Исполнительным механизмом служит тот же интегрирующий двигатель ИЭ-1М с редуктором, который осуществляет режим широтной коррекции гироагрегата в режиме ГПК. Однако в этом случае ИЭ-1М используется не в режиме интегрирования, а как исполнительный двухфазный двигатель переменного тока. Тахогенератор при этом используется для ограничения скорости вращения интегратора с помощью так называемого режима «отсечки», наступающего при превышении скорости вращения более 10 000 об/мин (что соответствует сигналу напряжения в 60 В, снимаемому с тахогенератора). При этом на вход усилителя при скорости более 10 000 об/мин подается сигнал отрицательной обратной связи с тахогенератора, уменьшающий усиление усилителя и, следовательно, снижающий скорости вращения до номинала (10 000 об/мин). При скорости вращения менее 10 000 об/мин обратная связь отключается и усилитель дает максимальное усиление.
Усилитель УШК управляет двигателем-генератором ИЭ-1М как в режиме гирополукомпаса, так и в режиме выставки и коррекции курса. Режим работы УШК определяется тем, включено или обесточено реле азимутальной коррекции, а также видом сигнала, поступающего на вход усилителя.
В режиме коррекции усилитель имеет два входа: для коррекции по «точному» и «грубому» каналам.
Коэффициент усиления по «точному» каналу находится в пределах 1000—2000 (по напряжению). Коэффициент усиления по «грубому» каналу того же порядка, поскольку используется общий канал усиления для «грубого» и «точного» входа, но вход «грубого» канала имеет ограничение по входному напряжению и усиление сигнала «грубого» канала начинается лишь после того, как входной сигнал по этому каналу превысит порог 3–4 е. Система азимутальной коррекции имеет следующие режимы работы:
— магнитной коррекции МК;
— астрокоррекции АК (по «грубо-точному» и «грубому» каналу);
— ручной коррекции (режим «курсозадатчика»).
РЕЖИМЫ РАБОТЫ СИСТЕМЫ АЗИМУТАЛЬНОЙ КОРРЕКЦИИ
Режим магнитной коррекции
Для коррекции показаний гироагрегатов по магнитному курсу (т. е. курсу, отсчитанному от магнитного меридиана) используется система магнитной коррекции, датчиком которой служит чувствительный к магнитному полю Земли элемент.
В системе ТКС в качестве элемента, измеряющего магнитный курс, используется индукционный датчик ИД-3.
Рассмотрим подробнее вопрос определения магнитного курса. Известно, что магнитные полюса земного шара расположены вблизи географических полюсов Земли. Магнитное поле, создаваемое земным шаром, взаимодействуя с ферромагнитной массой магнитной стрелки, создает силы, на нее действующие. Свободно подвешенная магнитная стрелка под действием этих сил устанавливается по направлению силовых линий.
Вектор напряженности магнитного поля Земли (рис.10) можно разложить на горизонтальную (Н) и вертикальную (Z) составляющие.
Направление вектора горизонтальной составляющей Н магнитного поля в данной точке определяет направление магнитного меридиана места.
Для определения направления движения самолета по земной поверхности с использованием рассмотренных свойств магнитного поля Земли измеряется угол по часовой стрелке между направлением магнитного меридиана и проекцией Ох′ продольной оси самолета Ох на плоскость горизонта. Данный угол называется магнитным курсом самолета.
Для измерения курса самолета в качестве чувствительного элемента, магнитных компасов можно использовать магнитную стрелку. Однако моменты трения, возникающие в опорах магнитной стрелки, наличие в конструкции токоподводов для дистанционного снятия показаний, вызывают значительные затирания стрелки и, следовательно, снижают чувствительность и точность работы компаса. Вследствие этого в высоких (полярных) широтах, где горизонтальная составляющая напряженности магнитного поля Земли становится меньше 0,1 э, магнитная стрелка практически перестает давать стабильные показания магнитного курса.
Для увеличения чувствительности магнитного датчика в курсовой системе применен датчик, основанный на индукционном принципе.
Чувствительным элементом датчика служит так называемый индукционный треугольник (рис.11), состоящий из трех магнитных зондов (рис.12), расположенных под углом 60° и закрепленных на общей платформе, находящейся в плоскости горизонта. Применение такого чувствительного элемента для измерения магнитного курса позволяет получить высокую точность и стабильность показаний при величинах горизонтальной составляющей магнитного поля Земли от Н=0,06 э и выше.
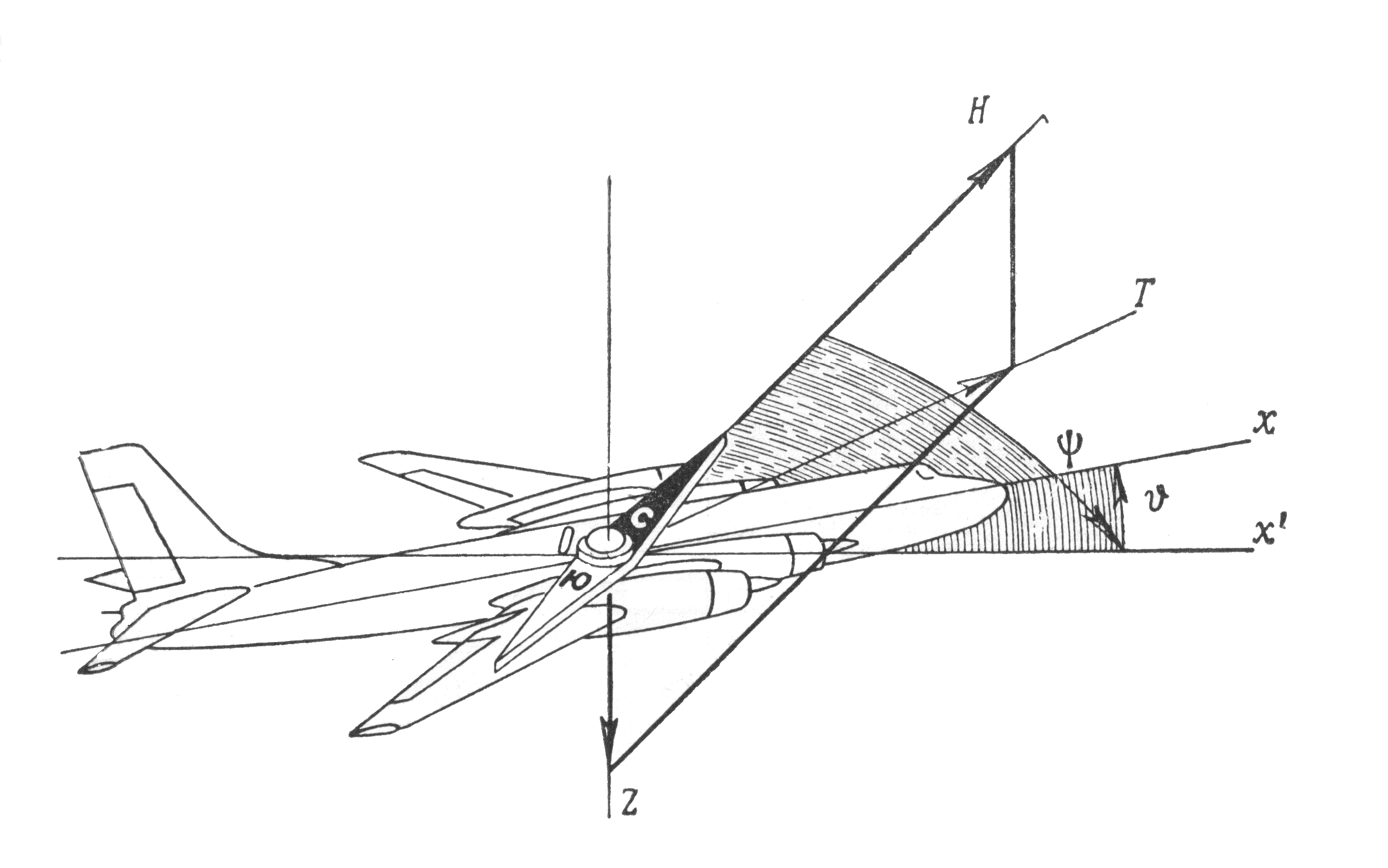
Рис. 10. Магнитный курс самолета:
Т—напряженность
магнитного поля Земли (полит величина);
Н—горизонтальная составляющая
напряженности магнитного поля Земли;
Z—вертикальная составляющая напряженности
магнитного поля Земли;
![]() —магнитный
курс МК самолета:
—магнитный
курс МК самолета:
![]() —угол
тангажа самолета; Ох—продольная ось
самолета; Ох′—проекция продольной оси
на горизонтальную плоскость; С–Ю—магнитная
стрелка компаса
—угол
тангажа самолета; Ох—продольная ось
самолета; Ох′—проекция продольной оси
на горизонтальную плоскость; С–Ю—магнитная
стрелка компаса
Рис.11 Схема соединения индукционного треугольника с сельсином-трансформатором (первый канал системы);
1–индукционный треугольник (чувствительный элемент датчика ИД-3);
2–статор
сельсина-трансформатора коррекционного
механизма КМ-5; .3–ротор сельсина-трансформатора
коррекционного механизма КМ-5; 4–усилитель;
5–отрабатывающий двигатель ДИД0.5Т;
6–редуктор; 7–зонд: 8—намагничивающая
обмотка; 9–сигнальная обмотка;
Н–горизонтальная составляющая
напряженности магнитного поля Земли;
![]() –напряжение
питания намагничивающей обмотки;
–магнитный
курс МК самолета;
–напряжение
питания намагничивающей обмотки;
–магнитный
курс МК самолета;
![]() –магнитный
поток статора.
–магнитный
поток статора.
Рис.12. Схема магнитного зонда:
1–сердечник;
2–намагничивающая обмотка; 3–сигнальная
обмотка; Н–горизонтальная составляющая
напряженности магнитного поля Земли;
–угол,
определяющий направление Н относительно
направления зонда;
–напряжение
питания намагничивающей обмотки;
![]() –напряжение
ОДС). возникающее в сигнальной обмотке
зонда;
–напряжение
ОДС). возникающее в сигнальной обмотке
зонда;
![]() —магнитный
поток, вызываемый в сердечнике действием
Н;
—магнитный
поток, вызываемый в сердечнике действием
Н;
![]() —магнитный
поток, вызываемый в сердечнике
намагничивающей обмоткой
—магнитный
поток, вызываемый в сердечнике
намагничивающей обмоткой
Магнитный зонд состоит из двух одинаковых сердечников 1, изготовленных из молибденового пермаллоя 80НХС и расположенных параллельно друг другу. На сердечники 1 навиты две обмотки: намагничивающая 2 и сигнальная 3.
Намагничивающая обмотка 2 навита на каждый стержень в отдельности и соединена последовательно, образуя встречную намотку, а сигнальная обмотка 3 охватывает оба стержня сразу. Подмагничивающее напряжение обмотки по величине выбирается таким образом, чтобы магнитные потоки, создаваемые, им в стержневых магнитопроводах и направленные встречно, при отсутствии внешнего магнитного поля не насыщали бы магнитопровод и были чисто синусоидальны. Такие потоки создают в сигнальной обмотке чисто синусоидальные напряжения, но будучи направлены, как и потоки, навстречу и равными между собой, они компенсируются, и сигнальное напряжение равно нулю (рис.13, а).
Также обстоит дело, если указанный чувствительный элемент поместить в постоянное магнитное поле, строго перпендикулярное к переменному полю магнитопроводов, тогда оба эти поля по отношению друг к другу остаются равными и синусоидальны и с сигнальной обмотки не поступает сигнал.
Если элемент поместить в магнитное поле под некоторым углом (не равным 90°), то появляется составляющая поля, совпадающего по направлению с направлением рабочего поля магнитопровода (рис.13,6). При этом синусоидальность суммарного потока нарушается и сумма вторичных напряжений уже не равна нулю; появляется сигнал, амплитуда и фаза которого зависят от направления стержня к горизонтальной составляющей магнитного поля.
Напряжение, снимаемое с сигнальной обмотки зонда и представляющее производную с обратным знаком от этого потока, имеет амплитуду также явно выраженной несинусоидальной формы. Частота сигнала, как следует из рис.13, двойная по отношению к частоте подмагничивающего напряжения.
Очевидно,
что чувствительность такого элемента
определяется отношением
![]() и чем больше эта величин, тем выше
чувствительность такого элемента к
отклонению его от перпендикулярности
к внешнему полю. Поэтому материалом
магнитопровода служит сплав из пермаллоя
(материал с высоким отношением
,
т. е. насыщающийся при весьма малых
значениях магнитной напряженности).
и чем больше эта величин, тем выше
чувствительность такого элемента к
отклонению его от перпендикулярности
к внешнему полю. Поэтому материалом
магнитопровода служит сплав из пермаллоя
(материал с высоким отношением
,
т. е. насыщающийся при весьма малых
значениях магнитной напряженности).
Таким образом, погрешность в определении направления горизонтальной составляющей магнитного поля Земли определяется в основном величиной неидентичности обоих стержней, а чувствительность – качеством магнитопровода. Кроме того, нелинейный характер явлений, происходящих в зонде, определяет невозможность непосредственного использования его сигнала для измерения магнитного курса. Существуют два способа включения зонда для определения направления магнитного поля Земли.

Рис.13 Графики, поясняющие работу магнитного зонда:
а–при
отсутствии внешнего магнитного поля:
б–при наличии внешнего магнитного
поля, неперпендикулярного зонду;
–полный
вектор магнитного потока поля Земли;
–вектор
магнитного потока от действия напряжения
питания
;![]() –вектор
рабочего потока;
–вектор
рабочего потока;
![]() –частота
напряжения питания;
–частота
напряжения питания;
![]() –сигнальные
обмотки зонда;
–сигнальные
обмотки зонда;
![]() –намагничивающие
обмотки зонда;
–намагничивающие
обмотки зонда;
![]() –напряжение
(ЭДС), снимаемое с сигнальной обмотки;
–напряжение
(ЭДС), снимаемое с сигнальной обмотки;
![]() –максимальная
индукция стержня зонда;
–максимальная
индукция стержня зонда;
![]() и
и
![]() –магнитная
индукция в сердечниках зонда;
–магнитная
индукция в сердечниках зонда;
![]() –результирующее
значение магнитной индукции зонда;
–результирующее
значение магнитной индукции зонда;
![]() и
и
![]() –
ЭДС, возникающие в сигнальной обмотке;
–
ЭДС, возникающие в сигнальной обмотке;
![]() и
и
![]() –величины
намагничивающих сил от действия токов
–величины
намагничивающих сил от действия токов
![]() и
и
![]() в сердечниках;
в сердечниках;
![]() –-линейный
участок изменения магнитной индукции
при изменении намагничивающей силы.
–-линейный
участок изменения магнитной индукции
при изменении намагничивающей силы.
Первый способ состоит в том, что зонд по сигналу отклонения от перпендикуляра к направлению магнитных силовых линий через специальный сервопривод отрабатывается в положение, при котором зонд будет перпендикулярен полю Земли. При этом стрелка, связанная с этим зондом, укажет направление магнитных силовых линий.
Существует второй способ, используемый в системе магнитной коррекции курсовых систем.
Сигнальные обмотки 9 (см. рис. 12) трех зондов индукционного треугольника соединяются «звездой» и тремя проводами электрически связаны со статорной обмоткой 2 сельсина-трансформатора, расположенного в коррекционном механизме КМ-5.
Токи, возникающие в обмотках статора 2 сельсина, возбуждают в нем результирующий магнитный поток Ф, который, в свою очередь, индуктирует в обмотке ротора 3 сельсина электродвижущую силу.
Чем больше рассогласована система «индукционный треугольник – сельсин-трансформатор», тем больше индуктируемое напряжение в обмотке ротора.
Напряжение, снимаемое с обмотки ротора, подается на вход усилителя 4, называемого усилителем первого канала, и далее на управляющую обмотку серводвигателя 5, который с помощью редуктора 6 отрабатывает ротор 3 сельсина в положение, соответствующее нулевой ЭДС.
Таким образом, повороту индукционного чувствительного элемента 1 датчика ИД-3 на какой-либо угол относительно магнитного меридиана Земли Н будет соответствовать поворот на такой же угол ротора 3 сельсина-трансформатора коррекционного механизма.
Коррекционный механизм КМ-5 предназначен для:
— связи магнитоиндукционного датчика ИД-3 с гироагрегатом ГА-3 или с указателем КУШ-1;
— устранения четвертной девиации и инструментальных-погрешностей с помощью специального лекала, установленного в коррекционном механизме;
— введения с помощью кремальеры магнитного склонения;
— приведения в полете магнитного курса к ортодромическому с помощью той же кремальеры (при введении ).
В коррекционном механизме установлены два сельсина, один из которых, как было сказано выше, служит для согласования ротора этого сельсина с магнитоиндукционным датчиком ИД-3, а второй сельсин-приемник служит для передачи сигнала курса, откорректированного в коррекционном механизме с помощью лекала и кремальеры, на гироагрегат ГА-3 или на указатель КУШ-1. Ось ротора первого сельсина связана с осью ротора второго сельсина при помощи лекального устройства, которое обеспечивает разворот роторов на угол, определяемый изгибом ленты лекального устройства.
Статор сельсина-приемника Ml коррекционного механизма КМ-5, если переключатель В2 пульта управления установлен в положение ГПК, через нормально-замкнутые контакты реле Р13 блока РБ-2 подсоединяется к сельсину-датчику гиромагнитного курса М2 указателя КУШ-1. Сигнал рассогласования с сельсина-приемника Ml в механизме КМ-5 подается через нормально-замкнутые контакты реле Р14 блока РБ-2 на вход усилителя УП-2 в указателе КУШ-1, выходной сигнал с которого поступает на управляющую обмотку двигателя Ml этого указателя, отрабатывающего ротор сельсина датчика М2 до согласованного положения с магнитным курсом. Скорость согласования может быть изменена электромагнитной муфтой ЭМ-1; управляемой кнопкой Кн1, расположенной также в указателе КУШ-1. Таким образом, сельсин-датчик М2 указателя КУШ-1 выдает сигнал гиромагнитного курса.
Если же переключатель В2 пульта ПУ-П установлен в положение «МК», то образуется следящая система, подобная только что описанной, но только с курсовым сельсином-датчиком МЗ основного или контрольного гироагрегата в зависимости от того, в какое положение установлен переключатель В4 пульта управления.
Схема системы магнитной коррекции построена так, что сигналы для коррекции контрольного гироагрегата проходят через цепь нормально-замкнутых контактов реле РЗ, Р6, Р7 блока РБ-2. При подаче напряжения + 27 В на эти реле подготавливают цепь коррекции основного гироагрегата. Сигнал рассогласования с КМ-5 (сельсин Ml) подается на вход «точного» канала усилителя УШК гироагрегата. При этом вход «грубого» канала усилителя УШК нормально-замкнутым контактом 1,2 реле Р8 блока РБ-2 закорачивается на корпус прибора.
Изменение скорости согласования сельсина-датчика гироагрегата осуществляется включением электромагнитной муфты ЭМ-1, расположенной в редукторе азимутальной коррекции ГА-3, при нажатии на кнопку Кн1 пульта управления.
Таким образом, при работе системы в режиме МК в зависимости от положения переключателя В4 пульта управления основной или контрольный гироагрегат выдают значение гиромагнитного или (при введенном в КМ-5 значении магнитного склонения) истинного курса.
Из описания цепей магнитной коррекции системы следует, что в системе непрерывно вырабатывается гиромагнитный курс: либо в гироагрегатах, либо в указателе КУШ-1.
Режим астрокоррекции
Коррекция гироагрегатов системы по астрокомпасу (астрокоррекция) осуществляется по курсу, определяемому по световому излучению светил дистанционными астрокомпасами. К астрокомпасам следует отнести и системы, определяющие курс по радиоизлучениям небесных светил.
В курсовой системе ТКС имеется два канала связи с астрокомпасами (системами): один канал для коррекции курсового сельсина гироагрегатов, второй для непосредственного указания астрокурса на указателе КУШ-1, минуя осредняющее устройство гироагрегата (стрелка «1» указателя КУШ-1 при установке его переключателя в положение «АК»).
Рассмотрим цепь коррекции курсового сельсина. В принципе она аналогична системе коррекции курсового сельсина от коррекционного механизма КМ-5, только вместо сельсина-приемника, являющегося датчиком сигнала магнитного курса, используется подобный же сельсин-приемник, установленный в астрокомпасе.
Статор этого сельсина подсоединяется к 3, 8, 9-му штырькам разъема задатчика курса ЗК-4, а сигнал с ротора этого сельсина подается на 7-й штырек этого разъема (второй конец ротора заземлен). При включении переключателя В2 пульта управления в положение «АК» этот сигнал через контакт реле Р8 блока РБ-2 подается на «точный» вход усилителя УШК основного или контрольного гироагрегата. При этом, аналогично описанной выше системе магнитной коррекции, курсовой сельсин приводится в согласованное положение с астрокурсом.
Так работает система в режиме астрокоррекции, если в качестве астродатчика используется устройство с выходом на одноканальном сельсине-приемнике, работающем в трансформаторном режиме. Точность передачи значения курса с астрокомпаса почти целиком определяется погрешностью сельсинной передачи, которая для применяемых в курсовых устройствах плоских сельсинов составляет 15—30 угловых минут.
Связь курсовой системы с астрокомпасами повышенной точности осуществляется по двухканальной сельсинной передаче, имеющей «точный» и «грубый» каналы, образуемые соответственно парой «точных» и парой «грубых» сельсинов.
Роторные концы, с которых снимается сигнал рассогласования, подсоединяются для «точного» канала к 7-ому штырьку, для «грубого» канала к 6-ому.штырьку этих же разъемов (общин конец' роторов заземляется). При этом связь гироагрегатов с сельсином астрокомпаса строится несколько иначе, чем в случаях магнитной или астрокоррекции, осуществляемых только по «грубому» каналу. Первое отличие состоит в том, что «грубо-точный» сельсин-приемник астрокомпаса через нормально-замкнутые контакты реле Р9 блока реле подключается к «грубо-точному» сельсину-датчику основного гироагрегата. и только в случае астрокоррекции контрольного гироагрегата включается реле Р9 и астрокомпас получает курс с контрольного гироагрегата (при этом В2 на пульте управления стоит в положении «АК», а В4 — в положении «Контр.»).
Данное обстоятельство вызвано спецификой работы точных астрокомпасов, которые для начальной ориентации и работы в режиме памяти используют рабочий курс, выдаваемый курсовой системой, т. е. курс основного гироагрегата.
Второе отличие заключается в том, что реле Р8 блока реле в режиме АК осуществляет коммутацию роторных концов таким образом, что сигнал рассогласования «точного» канала попадает на «точный» вход усилителя основного или контрольного гироагрегата, а сигнал рассогласования «грубого» канала на «грубый» вход усилителя азимутальной коррекции гироагрегата типа УШК.
При этом образуется замкнутая следящая система коррекции курсового сельсина с дистанционной передачей курсового угла на «точно-грубых» сельсинах, работающих в трансформаторном режиме. Ее принципиальная схема приведена на рис.6,а. Внешние соединения схемы дистанционной передачи осуществляются пятью проводами. Три провода используют для «грубой» передачи и три для «точной» передачи угла. Один провод; является общим для обеих передач.
Как правило, общую точку сельсинных концов делают внутри прибора (гироагрегата или астрокомпаса).
На
рис.6,б представлен качественный график
управляющих сигналов по «точному» (![]() )
и «грубому» (
)
и «грубому» (![]() );каналам
дистанционной передачи при рассогласовании
роторов приемников «грубого» и «точного»
сельсинов (жестко связанных между собой)
на 360 геометрических градусов относительно
положения роторов сельсинов-датчиков
(также жестко связанных между собой).
);каналам
дистанционной передачи при рассогласовании
роторов приемников «грубого» и «точного»
сельсинов (жестко связанных между собой)
на 360 геометрических градусов относительно
положения роторов сельсинов-датчиков
(также жестко связанных между собой).
На рис.6,б в более крупном масштабе показаны сигналы при малом (до 20°) угле рассогласования положения роторов приемников относительно роторов датчиков.
При рассмотрении этих графиков необходимо помнить, что сигналы рассогласования переменного тока и полярность изображенных сигналов условно означают их фазу.
Качественная сторона работы «грубо-точной» передачи состоит в следующем. Статоры «точного» канала приемника и датчика имеют по две обмотки каждый и выполнены одинаково, но так, что в отличие от трех обмоток статоров «грубого» канала расположенных под геометрическим углом 120° друг к другу и в сумме заполняющих полные 360 геометрических градусов, они расположены с геометрическим сдвигом под углом 90°, заполняя 40 геометрических градусов. Таким образом, на 360° обмотка статора «точного» канала имеет 18 полюсов (вместо двух полюсов у «грубого» канала).
Режим выставки курса перед полетом. Для начальной установки гироагрегатов системы на Земле перед взлетом (по известному значению курса самолета) в комплектации ТКС-П используют задатчик курса ЗК-4 и систему «точно-грубой» коррекции гироагрегатов. Установкой тумблера задатчика курса в положение «ЗК» подключают через нормально-замкнутые контакты реле Р1—Р6 этого прибора в канал астрокоррекции сельсин-приемник заданного курса. При этом включается освещение шкалы прибора, сигнализирующее также о том, что включен канал наземной выставки и отключен астрокорректор. С помощью кремальеры на З.К-4 устанавливают курс самолета. Затем система работает аналогично режиму коррекции по «точно-грубому» каналу от астрокомпаса.
В случае если значение курса самолета перед взлетом точно не известно, то выставку осуществляют, пользуясь каналом магнитной или астрокоррекции.
Следует заметить, что при установке на борт самолета пеленгатора или устройства для определения курса самолета на земле, ЗК-4 выполняет функции наряду с контрольно-проверочной аппаратурой УПП-ТКС-П бортового прибора предполетного контроля курсовой системы. В этом случае (при наличии универсального выставочного устройства) ЗК-4 может быть размещен вне поля прямого зрения штурмана.
Режим курсозадатчика
При нажатии на переключатель ВЗ пульта управления («Задат. курса») вправо или влево включается реле Р4 (или Р2) блока реле, подключающее напряжение (той или другой фазы), снимаемое с трансформатора Tpl, на вход цепи коррекции системы по «точному» каналу. При этом через контакты реле Р2 и РЗ напряжение +27 В поступает на реле азимутальной коррекции усилителя УШК и электромагнит ЭМ-1 основного или контрольного гироагрегата.
Задающее напряжение с трансформатора Тр1 через усилитель УШК заставляет двигатель ИЭ-IM и редуктор азимутальной коррекции с включенным электромагнитом разворачивать статор курсового сельсина гироагрегата по часовой или против часовой стрелки.
Нажатие на переключатель ВЗ следует производить до упора. По показанию указателей следят за значением курса и по достижении необходимого его значения переключатель ВЗ отпускают, он устанавливается в нейтральное положение. Гироскоп продолжает работать в режиме ГПК. Реле Р1 в пульте управления служит для блокировки: оно делает невозможной работу курсозадатчика, если переключатель В2 пульта установлен в положение «МК» или «АК».
КИНЕМАТИКА АГРЕГАТОВ СИСТЕМЫ
Коррекционный механизм КМ-5
Кинематика коррекционного механизма KМ-5 не отличается от других известных механизмов подобного назначения. Отличие состоит в том, что усилитель так называемого «первого канала» следящей системы «индукционный датчик – сельсин-приемник М2 коррекционного механизма», выполняемый обычно на лампах, здесь выполнен на транзисторах и встроен внутрь прибора. Кремальера механизма, разворачивающая статор выходного сельсина-приемника M1, служит для ввода магнитного склонения или магнитного путевого угла ортодромии.
Указатель штурмана УШ-3
Указатель имеет неподвижную шкалу, разградуированную на 300°, с ценой деления 1°. По этой шкале отсчитываются:
1. Ортодромический курс по стрелке «К». Стрелка «К» жестко связана с ротором сельсина курса М5 указателя. Ротор этого сельсина, получающего курс от основного гироагрегата, отрабатывается относительно жестко закрепленного статора с помощью сервопривода, состоящего из усилителя, двигателя Мб и редуктора.
2. Текущий (фактический) путевой угол по стрелке «ПУ». Стрелка «ПУ» жестко связана с ротором сельсина М2, получающего сигнал угла сноса. Ротор сельсина М2 отрабатывается относительно статора, жестко закрепленного на оси ротора сельсина М5, с помощью сервопривода, состоящего из усилителя, двигателя Ml и редуктора.
Таким образом, стрелка «ПУ» показывает сумму К+УС, т. е. текущий путевой угол, а угол между стрелками «ПУ» и «К» есть угол сноса.
3. Заданный путевой угол по индексу указателя, жестко связанного с ротором сельсина МЗ, получающего сигнал заданного путевого угла с навигационного вычислителя. Ротор сельсина МЗ отрабатывается относительно жестко закрепленного статора сервоприводом, состоящим из усилителя, двигателя М4 и редуктора. Кроме того, ротор (следовательно и индекс) сельсина МЗ может вручную разворачиваться на любой угол кремальерой, выведенной на лицевую сторону прибора.
Контрольный указатель штурмана КУШ-1
Конструктивно КУШ-1 в основном аналогичен указателю УШ-3, но выполняет другие функции.
Указатель имеет две стрелки, которые указывают:
1. Ортодромический курс (стрелка «К»). Стрелка «К», жестко связанная с ротором сельсина курса Мб, получающего сигнал курса с сельсина контрольного гироагрегата, отрабатывается сервоприводом (усилитель, двигатель и редуктор) относительно жестко закрепленного с корпусом прибора статора.
2. Стрелка, обозначенная «1», в зависимости от положения переключателя В1 указателя («МК», «АК», «РК»), управляющего реле Р8—Р11 указателя, коммутирующих статорные концы сельсина М4, показывает значение гиромагнитного или астрономического курсов либо значение пеленга на радиостанцию.
При установке переключателя Б1 указателя в положение «МК» сельсин стрелки «1» подключается к сельсину-датчику М2 прибора КУШ-1, который является датчиком гиромагнитного курса (при работе системы в режиме ГПК).
При этом статор М2, жестко связанный с ротором сельсина-приемника гироскопического курса, через нормально-замкнутые контакты реле Р13 (расположенного в блоке реле) связан со статором сельсина-приемника Ml коррекционного механизма (магнитный курс). Сигнал рассогласования с сельсина Ml коррекционного механизма через реле PI4 блока реле поступает в указатель па вход усилителя, питающего обмотку управления двигателя АН указателя КУШ-I, который через редуктор с большим передаточным числом отрабатывает ротор сельсина-датчика М2 указателя до согласованного с коррекционным механизмом положения. Редуктор согласования сельсина-датчика указателя так же, как и редуктор согласования курсового сельсина-датчика гироагрегата, имеет два передаточных числа для нормального и ускоренного согласования по сигналам магнитного курса.
Ускоренное согласование осуществляется включением электромагнита при помощи кнопки, расположенной на указателе.
Таким образом, с сельсина-датчика указателя КУШ-1 выдается сигнал курса, практически мгновенно повторяющий изменение гироскопического курса и скорректированного по магнитному, т. е. сигнал гиромагнитного курса, который может индицироваться стрелкой «I» и выдаваться с этого сельсина другим потребителям курса. Гиромагнитный курс продолжает вырабатываться в указателе КУШ-I, если переключатель В1 указателя КУШ-1 установить в положение «АК» или «РК». Если же установить режим МК на пульте управления, то реле Р13 блока реле срабатывает и переключает следящую систему стрелки «1» (в режиме МК на указателе КУШ-1) и сельсин-приемник коррекционного механизма на тот гироагрегат, который работает в это время в режиме магнитной коррекции.
Следовательно, стрелка «1» при установке В1 указателя КУШ-1 в положение «МК» всегда указывает значение гиромагнитного курса.
Блок пеленгов БП-5
Блок пеленгов предназначен для формирования значений пеленга па радиостанцию по сигналам гиромагнитного курса и курсового угла радиостанции. Сигнал гиромагнитного курса поступает с сельсина-датчика гиромагнитного курса указателя КУШ-1 на сельсин-приемник Ml блока БП-5, ротор которого отрабатывается двигателем МЗ через усилитель. С ротором Ml жестко связан ротор дифференциального сельсина М2, на статор которого подается сигнал курсового утла радиостанции.
Таким образом, с ротора этого дифференциального сельсина снимается сигнал пеленга на радиостанцию, который может индицироваться стрелкой «1» на приборе КУШ-1, если переключатель В1 этого прибора установить в положение «РК».
НАЗНАЧЕНИЕ, ПРИНЦИП ДЕЙСТВИЯ АГРЕГАТОВ КУРСОВОЙ СИСТЕМЫ