

Тахогенераторы
Тахогенератор постоянного тока - это машина постоянного тока с независимым возбуждением или возбуждением постоянными магнитами, работающая в генераторном режиме. По конструкции он почти не отличается от машин постоянного тока. Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования. Основными требованиями, предъявляемыми к тахогенераторам, являются: а) линейность выходной характеристики; б) большая крутизна выходной характеристики; в) малое влияние на выходную характеристику изменения температуры окружающей среды и нагрузки; г) минимум пульсаций напряжения на коллекторе.
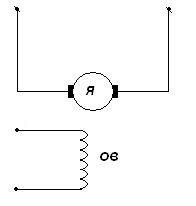
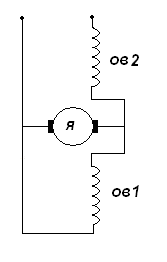
На рисунке 9.5 показаны принципиальные схемы тахогенераторов постоянного тока с электромагнитным возбуждением (а) и возбуждением постоянными магнитами (б).

В случае электромагнитного возбуждения обмотку возбуждения ОВ подключают к источнику постоянного тока (рис. 9.5, а). Тахогенератор возбуждается и если его якорь привести во вращение с частотой n, то на выходе генератора появится постоянное напряжение Uвых. Выходная характеристика тахогенератора постоянного тока - прямая линия.
Тахогенераторы серии ТД. Коллекторные, постоянного тока с электромагнитным независимым возбуждением. Рабочее положение переменное. Выходной конец вала со шпонкой.
Тахогенераторы серии ТГП. Коллекторные, постоянного тока с зубцовым ротором. Режим работы продолжительный.
Бесконтактные двигатели постоянного тока
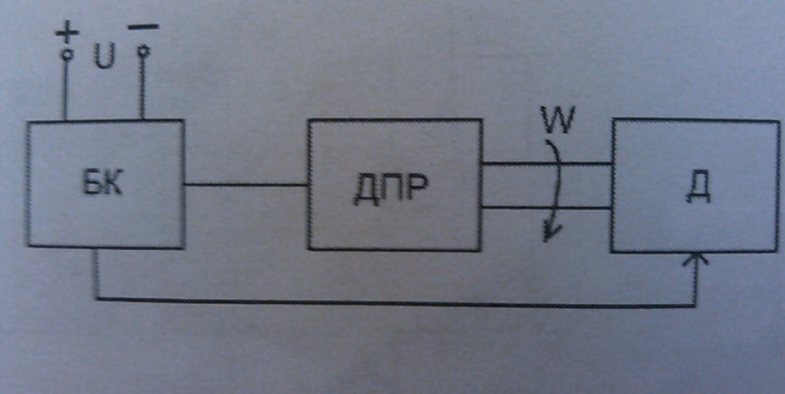
Для обеспечения надежной работы в тяжелых условиях эксплуатации в системах автоматики применяются бесконтактные двигатели постоянного тока, у которых щеточно-коллекторный узел заменен полупроводниковым коммутатором, что обеспечивает высокую надежность работы. Бесконтактные двигатели постоянного тока, как правило, состоят из следующих основных элементов:
бесконтактного двигателя (Д) с m-фазной обмоткой на статоре и ротором в виде постоянного магнита;
датчика положения ротора (ДПР), вырабатывающего сигналы управления;
бесконтактного коммутатора (БК), осуществляющего по сигналам ДПР коммутацию токов в обмотках статора двигателя.

а б
Рис.1.4. Бесконтактный двигатель постоянного тока:
а – блок-схема;
б – чувствительный элемент ДПР – датчик э.д.с.Холла.
В качестве датчиков положения ротора применяют различные чувствительные бесконтактные элементы. Наиболее целесообразно использовать датчики э.д.с. Холла (рис. 1.4,б), представляющие собой тонкую полупроводниковую пластинку с нанесенными на ней контактными площадками, к которым припаяны выводы 1-2, подключенные к источнику напряжения U1, и выводы 3-4, с которых снимают выходной сигнал U2. Если в цепи 1-2 протекает ток I, а датчик находится в магнитном поле, вектор индукции B которого перпендикулярен плоскости пластины датчика, то в датчике наводится э.д.с. и на выводах 3-4 появляется напряжение U2.
На рис.1.5. приведена принципиальная схема бесконтактного двигателя постоянного тока для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах.
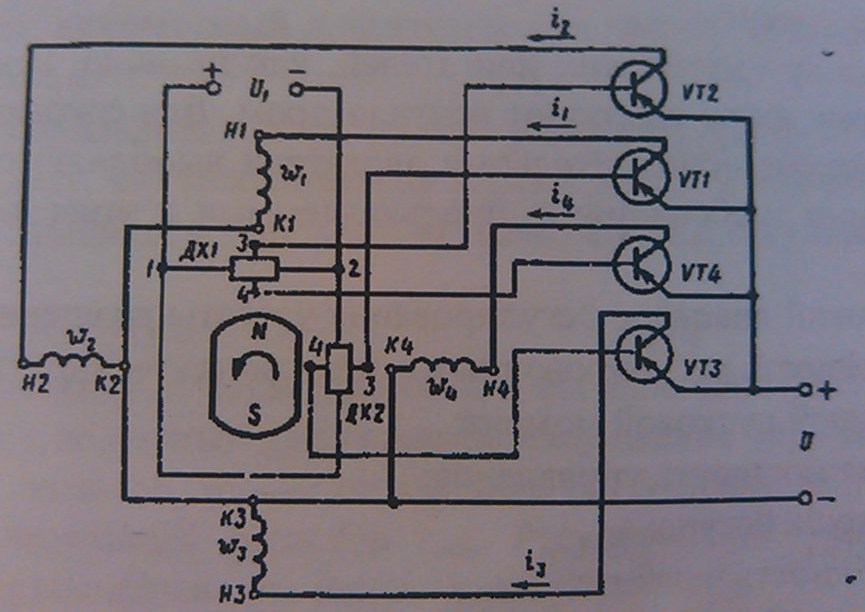
Рис.1.5. Принципиальная схема бесконтактный двигатель постоянного тока.
Четыре обмотки фазы двигателя W1 - W2 расположены на явновыраженных полюсах шихтованного сердечника статора. Датчики Холла ДХ1 ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VT1 - VT2 работают в релейном (ключевом) режиме. Сигнал на открытие транзистора поступает от соответствующего датчика Холла. Питание датчиков Холла осуществляется от источника напряжения U1. Число обмоток статора обычно не превышает четырех, но они имеют большое количество витков и, следовательно, повышенную индуктивность.
Эта особенность отражается на характеристиках бесконтактного двигателя (рис.1.6.), которые в целом схожи с характеристиками коллекторных двигателей постоянного тока. Недостатком бесконтактных двигателей постоянного тока является сложность устройства и высокая их стоимость.

Рис.1.6. Механические характеристики бесконтактного двигателя постоянного тока.
Характеристики электрических машин постоянного тока
Рассмотрим характеристики электрических машин постоянного тока в зависимости от типа и назначения машин.
Характеристики двигателя постоянного тока параллельного возбуждения.

Характеристики двигателя постоянного тока последовательного возбуждения.

Механические и регулировочные характеристики двигателя при якорном управлении.

Регулировочные механические характеристики двигателя с полюсным управлением.

Способы возбуждения машин постоянного тока
Независимое возбуждение Параллельное возбуждение

Последовательное возбуждение Смешанное возбуждение

Возбуждение от постоянных магнитов

Исполнительные двигатели постоянного тока серий ДПМ, ДПР
Тип двигателя |
Номинальные данные |
Iхх max, А |
Mпуск min, Гсм |
Iпуск max, А |
Срок службы, час |
|||||||
Uн, В |
Mн, Гсм |
n, об/мин |
Iн max, А |
|||||||||
ДПМ-20-Н1/Н2-8 |
27 |
20 |
4500 |
0,15 |
0,06 |
40 |
0,4 |
600 |
||||
ДПМ-20-Н1/Н2-11 |
12 |
15 |
9000 |
0,35 |
0,13 |
60 |
2,3 |
300 |
||||
ДПМ-35-Н1/Н2-08 |
12 |
150 |
9000 |
2,8 |
0,75 |
700 |
22 |
50 |
||||
ДПМ-35-Н1/Н2-10 |
12 |
200 |
4500 |
1,6 |
0,42 |
500 |
10,5 |
500 |
||||
Тип двигателя |
При U1=Uн |
|||||||||
I0, А |
Iн, А |
n0 |
Mп, Гсм |
M0 |
Uтрог, В |
ΔUиз, В |
Rа, Ом |
Umax пуск |
Umax реверс |
|
ДПМ-20-Н1/Н2-8 |
0,028 |
0,19 |
6400 |
52 |
9 |
5,5 |
1,4 |
132 |
32,5 |
32,5 |
ДПМ-20-Н1/Н2-11 |
0,105 |
0,13 |
10500 |
97 |
10 |
1,6 |
0,5 |
10 |
14,5 |
11 |
ДПМ-35-Н1/Н2-08 |
0,55 |
11,6 |
9900 |
1200 |
60 |
1 |
0,5 |
0,85 |
14,5 |
7 |
ДПМ-35-Н1/Н2-10 |
0,29 |
5,2 |
5500 |
940 |
56 |
1,15 |
0,5 |
2,2 |
14,5 |
11 |
Тип двигателя |
Uн, В |
Mн, Гсм |
nн |
Iн, А |
Iхх max |
Mп min |
Iпуск max |
Tэм |
Эл.‑магн пост |
Срок службы |
ДПР-42-Н1/Н2-03 |
27 |
50 |
4500 |
0,16 |
0,035 |
170 |
0,9 |
15…20 |
0,25…0,5 |
2000 |
ДПР-42Ф1/Ф2-03 |
27 |
50 |
4500 |
0,16 |
0,035 |
170 |
0,9 |
15…20 |
0,25…0,5 |
2000 |
ДПР-52-Н1/Н2-03 |
27 |
100 |
4500 |
0,26 |
0,045 |
750 |
3,25 |
15…20 |
0,3…0,6 |
2000 |
ДПР-53-Ф1/Ф2-03 |
27 |
100 |
4500 |
0,26 |
0,045 |
750 |
3,25 |
15…20 |
0,3…0,6 |
2000 |
Электродвигатели постоянного тока типа СЛ с параллельным возбуждением
Тип электро-двигателя |
Схема включения (номер рисунка) |
Напряжение, В |
Ток возбуждения, А |
Ток якоря, А |
Ток короткого замыкания, А |
Скорость вращения, об/мин |
Вращающий момент, 10-4кГм |
Момент инерции, 10-5кГм*сек2 |
Маховой момент, 10-5кГ*м2 |
Пусковой момент, 10-5кГм |
Статический момент трения, 10-5кГм |
Сопротивление обмотки якоря, Ом |
Сопротивление обмотки возбуждения, Ом |
Коэффициент самоиндукции якоря, мгн |
Мощность на валу, Вт |
Вес, кг |
СЛ-121 |
12 |
110 |
0.07 |
0.21 |
- |
4800 |
14 |
- |
- |
- |
- |
130 |
1030 |
- |
5 |
0,44 |
СЛ-161 |
0.08 |
21 |
1800 |
7,5 |
0,49 |
|||||||||||
СЛ-170 |
13 |
- |
0.9 |
2400 |
270 |
- |
- |
55 |
3 |
|||||||
СЛ-171 |
- |
270 |
- |
55 |
2,9 |
|||||||||||
СЛ-221 |
0.05 |
0.35 |
0.9 |
3700 |
35 |
0,14 |
5.5 |
900 |
80 |
117 |
1750 |
230 |
13 |
0,9 |
||
СЛ-221А |
0.76 |
3600 |
35 |
0,14 |
13 |
0,9 |
||||||||||
СЛ-240 |
24 |
0.32 |
2..5 |
0.74 |
4500 |
40 |
- |
- |
- |
- |
- |
- |
- |
19 |
1,4 |
|
СЛ-261 |
110 |
0.08 |
0..5 |
3600 |
65 |
0,2 |
7,85 |
2000 |
80 |
51 |
1400 |
140 |
24 |
1,25 |
||
СЛ-261А |
0.42 |
- |
2500 |
65 |
24 |
|||||||||||
СЛ-281 |
24 |
0.26 |
2.4 |
16 |
5200 |
50 |
1250 |
1,15 |
92 |
0,5 |
26 |
|||||
СЛ-321 |
110 |
0.11 |
0.7 |
3.3 |
3000 |
125 |
0,6 |
23,6 |
3100 |
130 |
25,8 |
1010 |
130 |
38 |
1,7 |
|
СЛ-361 |
0.8 |
0.85 |
5.5 |
3000 |
160 |
0,7 |
27,5 |
4000 |
20,5 |
1160 |
115 |
50 |
1,95 |
|||
СЛ-369 |
- |
0.9 |
5.85 |
3800 |
150 |
4500 |
15,2 |
90 |
55 |
|||||||
СЛ-369А |
14 |
- |
0.1 |
- |
3600 |
150 |
55 |
|||||||||
СЛ-369Б |
13 |
220 |
- |
0.4 |
- |
3800 |
120 |
- |
- |
- |
- |
- |
45 |
2 |
||
СЛ-521 |
110 |
0.1 |
1.2 |
10 |
3000 |
250 |
1,7 |
66,6 |
6500 |
350 |
8,5 |
820 |
58 |
77 |
3,3 |
|
СЛ-521К |
- |
0.5 |
1.1 |
1000 |
200 |
6350 |
74 |
900 |
360 |
20 |
||||||
СЛ-569 |
0.11 |
2.2 |
24 |
3400 |
475 |
2,7 |
106 |
9250 |
3,6 |
820 |
30 |
175 |
4,5 |
|||
СЛ-569К |
- |
0.8 |
2.25 |
850 |
420 |
10200 |
40 |
492 |
290 |
36 |
4,6 |
|||||
СЛ-571К |
24 |
- |
7 |
62 |
2200 |
420 |
7500 |
0,31 |
29 |
2 |
95 |
4,6 |
||||
СЛ-621 |
110 |
0.16 |
2.3 |
30 |
2400 |
700 |
6,75 |
264 |
12500 |
380 |
3 |
560 |
35 |
172 |
7,5 |
|
СЛ-621 |
110 |
0.18 |
2.9 |
54 |
2400 |
925 |
9,35 |
367 |
15500 |
1,75 |
520 |
25 |
230 |
9,7 |
Тахогенераторы серий ТД, ТГП
Тип тахогенератора: ТД-101:
удельная ЭДС: 3,3 В/об/с;
удельная мощность: 0,028 Вт/об/с;
сопротивление обмотки якоря: 330 Ом;
Iн max = 0,1 А;
nmax = 1500 об/мин;
Mвр max = 7∙10-4 кГсм;
Uвозб = 110 В;
Iвозб = 0,65 А;
Kперед хх = 0,021 В/об/мин;
Тип тахогенератора: ТД-102:
удельная ЭДС: 3,3 В/об/с;
удельная мощность: 0,028 Вт/об/с;
сопротивление обмотки якоря: 330 Ом;
Iн max = 0,1 А;
nmax = 1500 об/мин;
Mвр max = 7∙10-4 кГсм;
Uвозб = 110 В;
Iвозб = 0,65 А;
Kперед хх = 0,05 В/об/мин;
Jякоря = 62∙10-7 кГм2;
m = 0,7 кг.
Тип тахогенератора: ТГП-1:
максимальный ток нагрузки: Iнагр = 0,1 А;
максимальная скорость: nmax = 7500 об/мин;
коэффициент передачи на холостом ходу: Kперед. хх = 0,006В/об/мин;
вес: m = 0,15кг.
Тип тахогенератора: ТГП-3:
максимальный ток нагрузки: Iнагр = 0,05 А;
максимальная скорость: nmax = 7500 об/мин;
коэффициент передачи на холостом ходу: Kперед. хх = 0,006 В/об/мин;
момент инерции якоря: Jякоря = 0,8∙10-7 кГм2;
вес: m = 0,07кг.