

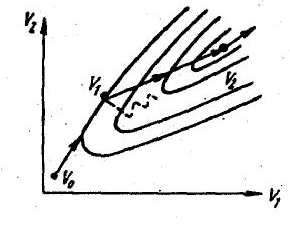
Метод покоординатного спуска или Метод Гаусса – Зейделя
min F(X);
X0€XП
Минимум целевой функции в области протяжения.
Х0 – начальная точка поиска.
В
методе Гаусса – Зейделя поиск совершают
в направлении координатных осей.

hнач – начальная величина шага поиска.
Для поиска минимума используются методы одномерной оптимизации.
Метод случайного поиска
Направление поиска выбирается случайно, путём выбора n случайных чисел, равномерно распределённых на отрезке [-1;1) из генератора случайных чисел, который есть в каждой ЭВМ.
n – число управляемых параметров.
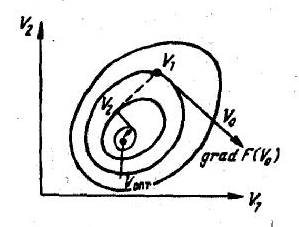
Метод градиента
grad F(X) = (∂F/∂x1; ∂F/∂x2; …; ∂F/∂xn)
F(x1; x2)
Производные вычисляются численно, путём приращения управляемых параметров.
x1 = x1,0 + ∆x1
∂F/ ∂x1 = ∆F/∆x1 ; ∆F = F(x10 + ∆x1) – F(x10)
В каждой точке для нахождения производных необходимо n+1 вычислений F(X).
Метод наискорейшего спуска
Метод Ньютона
В основу метода положен одноимённый метод решения нелинейных алгебраических уравнений.
grad F(X) = 0;
Обозначим Ф(X) = ∂F(x)/∂x = 0
Применим к данной системе уравнений метод Ньютона.
Ф(Xk) + ∂F(Xk)/∂X ∆X ≈0,
где ∆Х – значение Xk+1 - Xk
Xk+1 = Xk – (∂Ф/∂X)-1 * Ф(Xk)
X
 k+1
=
Xk
– Юk-1
grad
F(Xk)
- Формула
Ньютона.
k+1
=
Xk
– Юk-1
grad
F(Xk)
- Формула
Ньютона.
Если целевая функция является квадратичным многочленом по управляемым параметрам, то минимум находится за один шаг.
Недостатки метода:
Высокая трудоёмкость вычисления и обращения матрицы Гессе.
Не всегда имеет место сходимость решения.
Методы одномерного поиска
Найти минимум целевой функции: min F(Xk + hg) = min f(h)
h>0
g – единичный вектор выбранного направления.

Метод половинного деления (бисекции)
Метод золотого сечения
Золотое
сечение
– это деление отрезка АВ
на 2 части таким образом, что большая
его часть АС
является
средней пропорциональной между отрезком
АВ
и его меньшей частью СВ.

АВ/АС
= АС/СВ
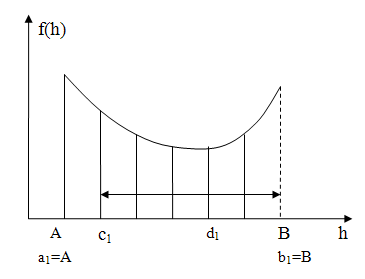
Для шага ак и вк
cк = ак + 0,382lk
dk = вк – 0,382 lk
lk = bk - ak
Если f(ck) < f(dk), то bk+1 = dk; dk+1 = ck; ak+1 = ak;
Если f(ck) ≥ f(dk), то ak+1 = ck; ck+1 = dk; bk+1 = bk
Если lk ≤ ε – условие окончания операции.
В методе золотого сечения для сужения интервала неопределённости необходимо сделать только одно вычисление.
Метод чисел Фибоначчи
βk = βk-1 + βk-2 , где β2 = β1 , βk = 1,1,2,3,5,8,13,21,34,55,89…
k = 0,1,2,3,4,5, 6, 7, 8, 9, 10,…
ε ≈ В-А / 1,618N ,
где N – число итераций (число последовательных вычислений). N задаётся.
Определяется порядковый номер числа Фибоначчи К = N + 2
Это – максимальный номер числа Фибоначчи- К.

сn = an +αnln ; αn = βN+2-n / βN+3-n ;
dn = bn- αnln.
Метод полиноминальной аппроксимации
f (h)
= a0
+ a1h
+ a2h2
h` = a1/2a2
(h)
= a0
+ a1h
+ a2h2
h` = a1/2a2
h` = hc + (h[f(ha) – f(hb)]) / (2[f(ha) – 2f(hc) + f(hb)])
ha = hc – H1
hb = hc + H1
Сведение задач условной оптимизации к безусловной
Для сведения задач условной оптимизации к безусловной используют метод штрафных функций.
Метод внешней точки
Например, имеем ограничения типа неравенств φ(X) < 0
Ф(Х) = F(X) + Qk(X)
Qk(X) = rk ∑ [max {0; φi(X)}] 2; rk > 0 – функция штрафа в методе внешней точки.
Решаем задачу. Найти минимум целевой функции при выполнении ограничений - min F(X)
ХД = {X| φ(X) < 0}
Ищем минимум новой функции
min Ф(Х)
Поиск начинают с небольших значений rk, постепенно его увеличивая до тех пор, пока разница между предыдущим и последующим значением не станет меньше заданной погрешности δ.
ΔХ = Хk+1 – Хk < δ.
Метод барьерных функций или метод внутренней точки
Ф(Х) = F(X) – rk ∑ 1/φi(X)
Где функция штрафа имеет вид: Qk(X) = -rk ∑ 1/φi(X)