

Раздел № 3 Методы оптимизации технических объектов
Оптимизация – создание лучших объектов.
Виды описания проектируемых объектов и классификация их параметров
Математическая модель объекта (ММО) – это система математических объектов (чисел, переменных, матриц) и отношений между ними, выражающихся в уравнениях, неравенствах и т.п., описывающих свойства технического объекта.
Среди свойств объекта различают свойства системы, элементов системы и внешней среды. Соответственно они находят своё количественное выражение в выходных , внешних и внутренних параметрах объекта.
Внутренние параметры – параметры электрической системы.
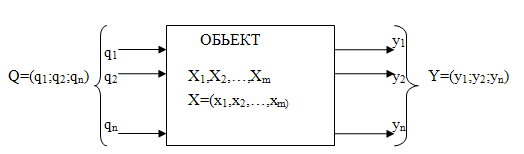
Y = F(X; Q)
F = (f1; f2;…; fn)
y 1
= f1(x1,
x2,…,
xn;
q1,
q2,…,qn)
1
= f1(x1,
x2,…,
xn;
q1,
q2,…,qn)
y2 = f2(X; Q)
………………………………….
yn = fn (X; Q)
Переменные, описывающие состояние объекта, называют фазовыми переменными.
Уравнение для фазовых переменных: φ(z, z’,z’’,…,zn) = V,
Большинство выходных параметров являются функционалами, т.е. для их определения необходимо при заданных X и Q решать систему уравнений и по полученным величинам вычислить выходные параметры Y.
Техническое задание включает в себя технические требования к выходным параметрам. Вся совокупность технических требований образует вектор технических требований (Т.Т.)
Он включает в себя:
ТТ = (ТТ1; ТТ2;…; ТТn)
Соотношение между соответствующими выходными параметрами и техническими требованиями называют условиями работоспособности.
yi < TТi
yi > TТj
TT`k < yk < TT"k
Требования к математическим моделям.
Универсальность – характеризует полноту отображения в модели свойств реального объекта.
Точность – характеризует степень совпадения параметров реального объекта и их расчётных значений по математической модели.
yj мат. мод. - yj
ε =
уj ;
ε = (ε1;
ε2;…;
εn)
=
уj ;
ε = (ε1;
ε2;…;
εn)
ε – относительная погрешность.
εmax = ||ε|| = max εj;
| |ε|| =√ ε12+ ε22+…+ εn2
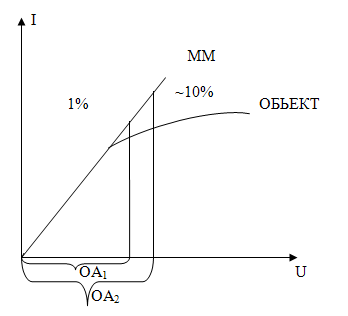
Адекватность - это способность математических моделей отображать заданные свойства объекта, с погрешностью не выше требуемой.
Адекватность модели, как правило, имеет место в ограниченной области изменения внешних и внутренних параметров, называемой областью адекватности (ОА)
Область адекватности – множество значений, внешних и внутренних параметров, для которых погрешность вычисления выходных параметров не превосходит заданную величину δ>0.
ОА
= {Q;
X};
εmax
≤
δ
Экономичность математической модели – характеризуется затратами вычислительных ресурсов ЭВМ на её реализацию.
Часто экономичность оценивают по порядку системы уравнений или количеству арифметических операций, необходимых для решения - эти оценки не зависят от типа ЭВМ.
Требования высокой точности, универсальности и широкой области адекватности противоречат требованию экономичности. В каждом конкретном случае приходится выбирать оптимальное, компромиссное решение. Поэтому в системах автоматизированного проектирования (САПР) используются модели различных степеней точности, универсальности, адекватности и экономичности.
Основные определения
Критерий оптимальности – это правило, согласно которому выбирается наилучший вариант из некоторого множества.
Будем рассматривать объекты, имеющие неизменную структуру и различающиеся численными значениями внутренних и внешних параметров. В основе построения правильного предпочтения лежит целевая функция, -качества»
F(X); (X€X0)
X = (X1, X2,…Xn) – вектор управляемых параметров.
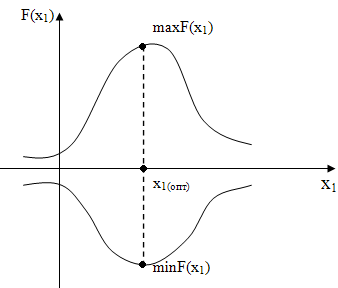
Если значение целевой функции тем больше, чем выше качество объекта, то оптимизация есть максимизация целевой функции
max F(X); X€X0
В противном случае оптимизация есть минимизация целевой функции.
min F(X);
Если область определения Х0 есть дискретное множество точек, то объект – дискретный и имеет задачу дискретного ( в частном случае) целочисленного программирования. В противном случае – это задача параметрической оптимизации непрерывных объектов.
Переход от задачи максимизации к задаче минимизации и наоборот осуществляются сменой знака целевой функции.
Безусловные экстремумы
ε – окрестностью некоторой точки Х0 будем называть множество точек Sε(X0), которые находятся от Х0 на расстоянии не превышающем заданное число ε > 0.
Sε(X0) = {X| ||X – X0|| ≤ ε}
||X – X0|| - Норма вектора, отождествляемая с расстояния между точками Х и Х0
Максимумом целевой функции F(X) называют её значение F(X`), если существует число ε > 0 такое, что для любой точки Х€ Sε(Х`) за исключением самой точки Х`.
Выполняется неравенство F(X) – F(X`) < 0 – условие максимума.
Аналогично минимумом функции F(X) называют её значение F(X`), если выполняется условие:
F(X) – F(X`) >0.
Точку Х` называют экстремальной точкой. В точке глобального экстремума максимизируемая (минимизируемая) целевая функция имеет наибольшее (наименьшее) значение среди всех локальных экстремумов.
Задачи, в которых отсутствуют ограничения на области управляемых параметров, относятся к задачам безусловной оптимизации.
Условные экстремумы
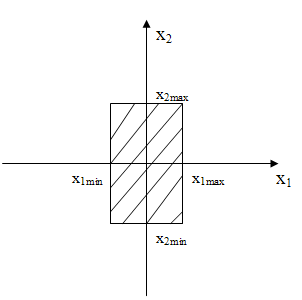
При наличии ограничений на область изменения управляемых параметров имеем задачу условной оптимизации.
Прямые ограничения Хi > Xi min ; Xj< Xj max и т.д.
Область допустимых параметров ХД = { X € X0 | Xi > Xi min; Xj < Xjmax} при наличии прямых ограничений.
Функциональные ограничения - имеют вид неравенств (равенств)
а) ограничения-неравенства φ(Х)>0, φ=( φ1, φ2,…, φn)
б) ограничения-равенства Ψ(Х)=0, Ψ=( Ψ1, Ψ2,…, Ψn)
В задачах проектирования роль ограничения часто выполняют условия работоспособности.
XP={X€XД | φ(x) > 0; ψ(x) = 0}
Необходимые и достаточные условия экстремума
В классическом методе используется безусловная оптимизация, когда известно аналитическое выражение целевой функции F(X) и она не менее чем дважды дифференцируема по управляемым параметрам.
Разложим F(X) в ряд Тейлора в окрестности экстремальной точки Х`.
F(X) = F(X`) + ∂F/∂x1∆x1 + ∂F/∂x2 ∆x2 + … + ∂F/∂xn ∆xn + ½! (∂2F/∂x12∆x21 +
+∂2F/∂x1∂x2 ∆x1∆x2+ … + ∂2F/∂xn2 ∆xn2) +... ,
где ∆xi = xi -xi`
∂F/∂xk – первая производная по xk.
 X1
– X1`
X1
– X1`
∆Х = Х – Х` = X2 – X2` - вектор столбец.
X3 – X3`
∆Xt – матрица строка (X1 – X1`; X2 – X2`;…; Xn – Xn`)
 ∂2F/∂x12;
∂2F/∂x1∂x2;
….∂2F/∂x1∂xn
∂2F/∂x12;
∂2F/∂x1∂x2;
….∂2F/∂x1∂xn
∂2F/∂x1∂x2; ∂2F/∂x22;……. ∂2F/∂x2∂xn
∂2F/∂X2=Ю= …………………………………………. – матрица Гессе.
∂2F/∂x1∂xn; ∂2F/∂x2∂xn;… ∂2F/∂xn2
F(X) = F(X`) + ∂F/∂X*∆X + 1/2 ∆Xt * ∂2F/∂X2 *∆X + …
F(X) – F(X`) < 0 – условие максимума.
Может выполняться только при ∂F/∂X = grad F = 0 – необходимое условие экстремума.
Точки, в которых выполняется необходимое условие экстремума называются стационарными.
∆Xt * ∂2F/∂X2 *∆X < 0
Матрица Гессе Ю, удовлетворяющую данному условию при любых ∆Х называют отрицательно определенной матрицей.
Следовательно, отрицательная определённость матрицы Гессе является достаточным условием максимума.
∆Xt * ∂2F/∂X2 *∆X > 0
Соответственно матрицу Гессе, удовлетворяющую данному условию, называют положительно определённой.
Положительно определённая матрица Гессе достаточное условие min.

Седловая точка – это точка, в которой достаточные условия не выполняются, т.е. нет не максимума, не минимума.
Метод неопределённых множителей Лагранжа
Применяется для нахождения условного максимума при известных аналитических выражениях целевой функции и ограничений.
Рассмотрим случай ограничений типа равенств.
Запишем функцию Лагранжа:
Ф(Х; Λ) = F(X) + Λ * Ψ(Х) = F(X) + ∑λkψk(X), где Λ – Вектор неопределённых множителей Лагранжа.
Если Х€ ХД
то выполняются ограничения и
Ψ(Х) = 0
Х € ХД
Ф(Х; Λ) = F(X)
Х€ ХД
Найдем максимум Ф(Х; Λ):
p

 ∂Ф(Х;
Λ)/∂Х
= ∂F(X)/∂X
+ ∑ λk
∂Ψk(X)
∂Ф(Х;
Λ)/∂Х
= ∂F(X)/∂X
+ ∑ λk
∂Ψk(X)
k=1 ∂X
∂Ф(Х; Λ)/∂ Λ = Ψ(Х) = 0.
Метод неопределённых множителей Лагранжа может быть распространён и на задачи с ограничениями типа неравенств.