

Радары с частотной манипуляцией fsk
При частотной манипуляции (ЧМн) значениям «0» и «1» информационной последовательности соответствуют определенные частоты синусоидального сигнала при их неизменной амплитуде. ЧМн, как и ЧМ, помехоустойчива, так как помехи искажают в основном амплитуду, а не частоту сигнала.
В обычной радарной системе время полета (time of flight) может быть вычислено подсчетом числа циклов переданного сигнала между передачей и получением эха.
Радарная система FSK является альтернативной схемой для импульсных и FMCW-радаров. Вместо непрерывной модуляции несущей частоты сигнал поочередно переключается на короткий период от одной к другой частоте (из двух, по крайней мере, различных частот с разницей в несколько МГц — несколько десятков МГц), передается, генерируя сигнал эха, который также включает два состояния на этих двух частотах. Определяется относительный фазовый сдвиг переданного и полученного сигналов на каждой частоте, что позволяет определить расстояние до объекта. Абсолютное число циклов переключения между передачей и получением эха не является важным. Эти различные частоты передаются многократно (каждая группа частот называется фреймом), измерения расстояния выполняются на основе каждого фрейма по фазовому смещению. Основываясь на доплеровском смещении каждого эха, FSK-радар определяет также относительную скорость.
О методах определения угла азимута цели
Для определения угла азимута цели могут применяться различные методы последовательного управления лучом антенны (переключение или качание). Это делается для того, чтобы выполнить последовательное перемещение радарного луча от антенной опорной оси во всех четырех направлениях: выше, ниже, из стороны в сторону. Сравнение относительных амплитуд эха позволяет определять азимут и угол повышения цели. Для исключения ошибок вследствие флуктуаций амплитуд эха в течение сканирования применяется моноимпульсный метод [105, 134], который заключается в одновременном использовании четырех лучей.
Требование современных автомобильных радарных систем — область обзора порядка 12–16° с угловым разрешением менее 3°. В современных радарах могут быть использованы механические сканирующие антенны с малой шириной луча или электрически переключаемые устройства с PIN диодами, а также стационарные антенны с несколькими (3–8) узкими лучами. Например, M/A-Com поставляет импульсные доплеровские 77-гигагерцовые радары с эффективным диапазоном 150 м, использующие трехлучевую переключаемую антенну, которая передает 36-наносекундные импульсы с шириной луча 3°.
Для автомобильных измерений азимута радары ACC TriQuint Semiconductor используют ширину антенного луча порядка 1,5° [105]. Согласно законам физики антенн размер излучающей апертуры должен превышать значение, кратное длине волны на рабочей частоте. Более высокие частоты снижают размер антенн (типичные модули — порядка 10 см3). Узкий луч позволяет обеспечить оптимальный компромисс между требуемым диапазоном и выходной мощностью порядка 10 мВт, так как повышение дальности действия обычно сопряжено с повышением мощности радара.
Другой метод дизайна антенн основан на применении одной широколучевой передающей антенны с двумя или более ресиверными антеннами с узким лучом.
MMIC
MMIC (monolithic-microwave IC) представляют собой интегральные схемы (обычно на основе арсенида галлия, GaAs, позволяющего производить важные радарные компоненты — VCO, усилители средней мощности, блоки смесителя — рис. 56). В настоящее время уже довольно много компаний имеют возможность производить MMIC и поставляют полупроводниковые радары на автомобильный рынок. К их числу относятся, например, компании Avago (Agilent), Atmel, Fujitsu, M/A-Com, Mitsubishi, NEC, TriQuint, TRW Automotive, UMS (подробную информацию по использованию MMIC в радарных системах можно найти на сайтах компаний, а также в источниках [110, 115, 122]).
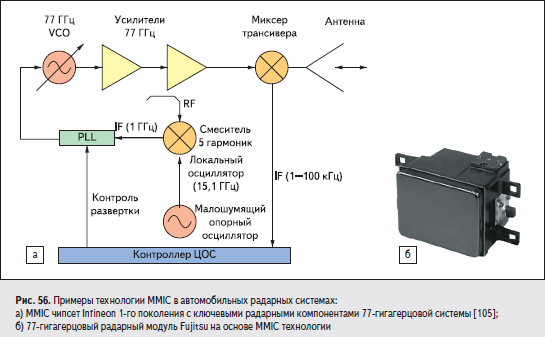
Миллиметровые волны частотой 77 ГГц дают выход мощностью 10 мВт, причем 76–77-гигагерцовая область — международное соглашение для применения в АКК, но проблемами являются повышение разрешения и достижение улучшенной геометрии и размеров модулей.
Полупроводниковые технологии позволяют достичь высоких рабочих характеристик радаров и допускают промышленные объемы производства, что при наличии спроса в будущем гарантирует снижение цены. Примером является процесс pHEMT (pseudomorphic high-electron-mobility-transistor) для полупроводников на основе арсенида галлия.
Так, корпорация Mitsubishi Electric в 2003 году разработала и применяет твердотельную MMIC для автомобильных радаров, работающую на частоте 76 ГГц и изготовленную по технологии pHEMT на основе GaAs. Усилитель обеспечивает выходную мощность до 30 мВт, что в полтора раза выше, чем у обычных усилителей, а уровень шума 3,5 дБ — один из самых низких, по заявлению фирмы, в этом частотном диапазоне.
0,15-микронный процесс pHEMT, названный PH15, применяет и компания UMS.
TriQuint Semiconductor использует для производства MMIC 0,25- и 0,15-микронный pHEMT, а также 0,15-микронный процесс LN. Компания предлагает силовые MMIC с уровнями мощности 250 мВт — 8 Вт в частотных полосах от постоянного тока до 100 ГГц.
Компания Agilent с 2005 года предлагает 77-гигагерцовые чипсеты MMIC для автомобильных радаров, производимые по 0,15-микронной технологии MHEMT (Metamorphic HEMT).
Эти методы в настоящем все еще достаточно дорогие, но обеспечивают оптимальные характеристики на высоких частотах (77 ГГц), и их цена снижается. В настоящем цена автомобиля Mersedes S-класса, оборудованного системой АКК c радарными датчиками от M/A-COM, увеличивается на $1600. Компания M/A-COM вначале использовала материал InP, но затем выполнила переход на материал GaAs при производстве MMIC, используя разработки компании Automotive Distance and Control Systems GmbH. В настоящем компания M/A-COM планирует осуществить переход на кремний-германиевые
Лекция9 Интегрированный датчик температуры с МК
Функция МК - получение в цифровом виде значения температуры.
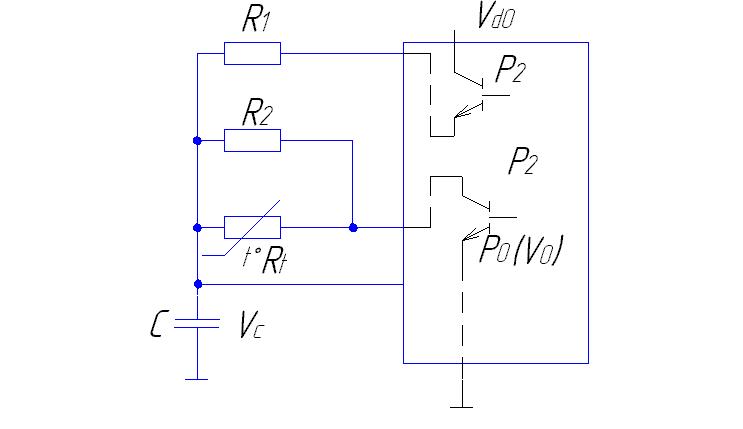
Рис.20 Схема интегрированного датчика
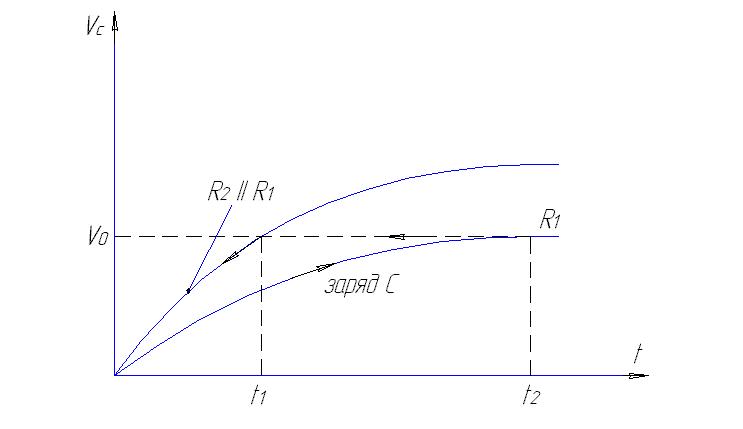
Рис.21 Заряд -разряд конденсатора С.
Rt - терморезистор, сопротивление которого зависит от температуры.
Рис.22 Температурная характиристика терморезистора
R2 - служит для линеризации температурной характиристики чувствительного элемента в области измерений.В диапазоне ΔТ=50 0С R2 позволяет обеспечить отклонение от линейности в пределах ±1,5 0С.R1 - резистор, который обеспечивает функционирование процесса измерения, обеспечивает фиксированный режим заряда конденсатора С.Выбор резисторов R1 и R2:
В заданном интервале температур 25...75 0С определяется сопротивление термистора в середине интервала.Rt = 10к;Rt при 50 0С = 3,6к;R2 = Rt90 0C = 3,6к;
R1 = R2 = Rt при 50 0С = 3,6к.R1 = R2 (всегда - не зависят от температуры - термостабилизированные).
1) Команда МК: заряд конденсатора С через резистор R1 от источника VDD (с начальным Uc = 0) P1 - разомкнут.
2) Остановка заряда, когда Uc = V0.
3) Измерение t2.
4) Отключение выхода P2 и соединение выхода P1 с землей (заземление).
5) Разряд конденсатора С с начальным напряжением Uc = U0 до Uc = 0.
6)
Измерение t1. Тизм
= t1
+ t2.Поскольку
разряд конденсатора С производится
через параллельно соединенные резисторы
R2
и Rt,
то время t1
будет зависеть от температуры.V0
< VDD;![]() ;
;
Рассчитывается
t1 по аналогичной формуле, но вместо R1
подставляется R2.![]()

Лекция10 Устройства для измерения расхода жидкости или газа.
Термоанемометры- устройства для измерения расхода жидкости или газа, или их скорости потока.
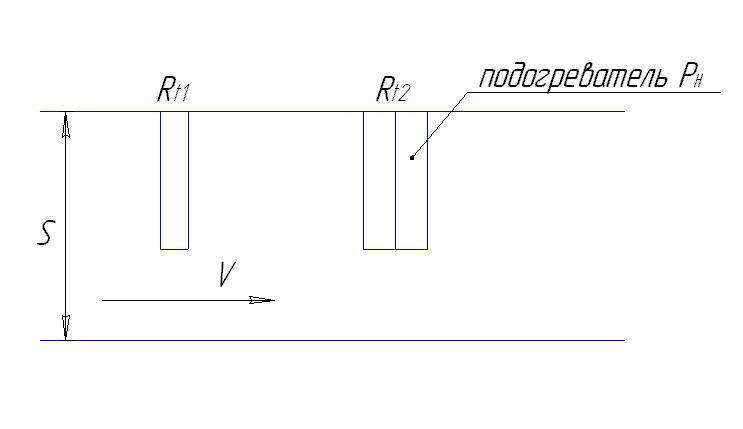
Рис.23 Термоанемометрический расходомер
Терморезистор Rt1 и Rt2 находятся в сечении потока и омываются газом или жидкостью. Поток охлаждает Rt1 и Rt2, но температурный режим Rt1 существенно не меняется, так как у него мал начальный перегрев, но перегрев Rt2 большой и влияние на него потока значительно больше.
Q=S·U·q; где Q - массовый расход; S - площадь; U - скорость потока; q - удельный вес [кг/м3]
.1) PН=const; ΔT=var=T2-T1.

2)
ΔT=T2-T1=const; PH=var.![]()
Термоанемометрический расходомер с непосредственным нагревом.Подогрев током, протекающим непосредственно через терморезистор.
![]() Q=S·U·q;
ΔТ=const; PQ=var;
Q=S·U·q;
ΔТ=const; PQ=var;
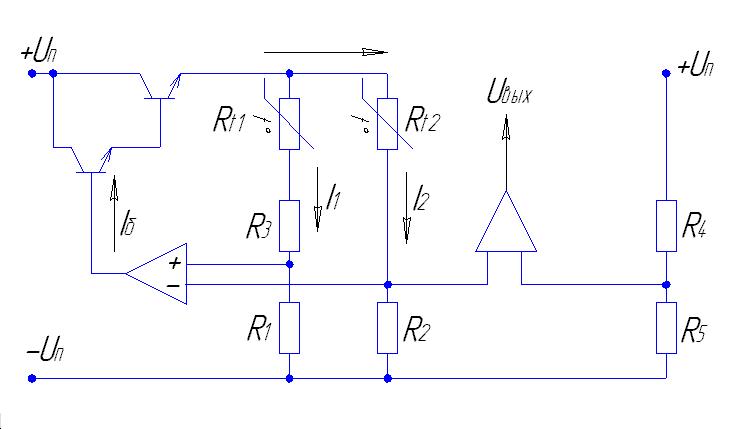 Рис.24
Схема термоанемометра
Рис.24
Схема термоанемометра

U↑,
Q↑,
ΔRt2↑,
T2↓,
Rt2↑,
Iб2↑,
I2↑
следовательно РRt2↑,
ΔТ
= const
(восстановление перегрева), I2
UR2↑,
UВЫХ↑.С
увеличением потока, и соответственно
увеличением расхода газа или жидкости
увеличивается отбираемая тепловая
мощность от резистора Rt2,
уменьшится его температура, увеличится
его сопротивление, вследствие чего
UR2↓,
увеличится ток Iб2,
следовательно I2↑,
следовательно мощность, рассеиваемая
в резисторе Rt2
увеличится, возрастет все напряжение
питания моста, следовательно I2R2↑
и установится новый режим увеличения
тока I2,
URt2↑,
но ΔTRt2
= const
(перегрев).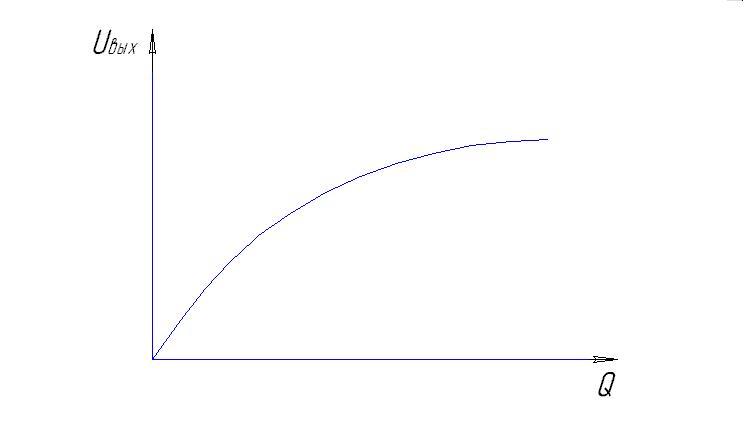 Рис.25
Характеристика термоанемометрического
расходомера
Рис.25
Характеристика термоанемометрического
расходомера
Температурная компенсация термоанемометрического расходомера осуществляется с помощью резистора Rt1. При изменении температуры меняется его сопротивление и не происходит разбалансировка моста.
![]() ;
где
;
где
![]() ,
,![]() - удельная мощьность рассеивания
терморезисторов на одном градусе
перегрева.R1
- подстроечный резистор, обеспечивающий
заданный перегрев Rt2
.R5
- подстроечный резистор, устанавливающий
нуль выходного напряжения.R1
и R5
- обеспечивают равенство:
- удельная мощьность рассеивания
терморезисторов на одном градусе
перегрева.R1
- подстроечный резистор, обеспечивающий
заданный перегрев Rt2
.R5
- подстроечный резистор, устанавливающий
нуль выходного напряжения.R1
и R5
- обеспечивают равенство:
UR1=UR2=UR5;
Rt2 выполняется в виде платиновой проволоки. Фирмой "Bosch" используется Rt2 в виде тонкой платиновой нити, которая подвергается кратковременному нагреву до 1000С после остановки ДВС (очищение от налета Rt2) .Rt2 в никелевой фольге, нанесен на изолированную пластину.
Пленочный термоанемометр
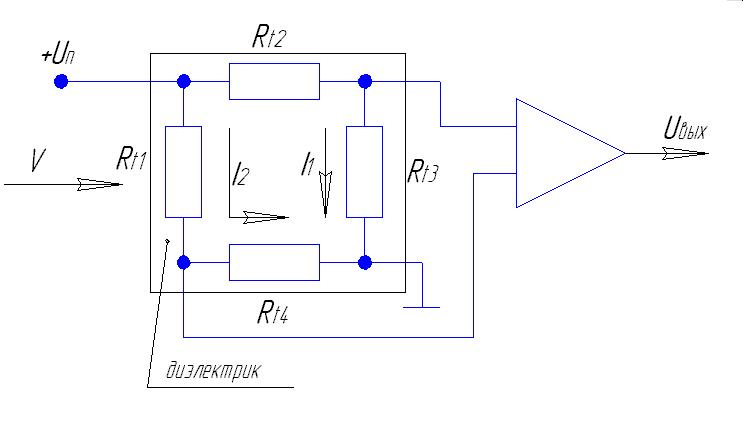 Рис.26
Схема пленочного термоанемометра
Рис.26
Схема пленочного термоанемометра
ΔPRt1+PRt3>ΔPRt2+ΔPRt4;U↑, Rt1↑↑, Rt2↑, Rt4↑ (увеличивается слабее).
Преимущества: не создает динамического падения давлений на его зажимах.
Q: 3-600 кг/час (воздух).ΔQ ± 3%.Δt = 10мс.
Лекция 11Устройства измерения давления газа,жидкости
1 атм. = 760 мм.рт.ст. 1 атм. = 105 Па.Разряжение - отрицательное давление.Давление создается источником силы, действующим на плоскость.Основной датчик давления - деформируемая мембрана, перемещение которой пропорционально давлению.Процесс перемещения мембраны прекращается, когда сила, действующая на мембрану, уравновесится силой деформации мембраны.
В современных манометрах деформация мембраны происходит через систему шестеренок, перемещающих ползунок по резистору (изменение R, I в обмотке логометра). Стрелка отклоняется.Измеряемое давление - не ниже 2 атм
Габаритный чертеж ДАТЖ