4.3. Ускорение при плоском движении твердого тела
Ускорение какой-либо точки тела при его плоском движении равно векторной сумме ускорения полюса и ускорения этой точки при вращательном движении тела вокруг полюса:
![]() .
.
Здесь: – ускорение полюса;
![]() – ускорение точки В при ее вращении
вместе с телом вокруг полюса А:
– ускорение точки В при ее вращении
вместе с телом вокруг полюса А:
нормальная составляющая ускорения
направлена по нормали, т.е. по АВ
к полюсу А, и равна
![]() ;
;
касательная составляющая ускорения
направлена АВ
в сторону дуговой стрелки
![]() и равна
и равна
![]()
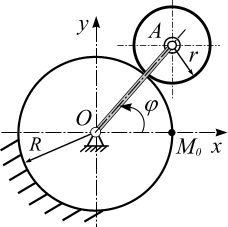
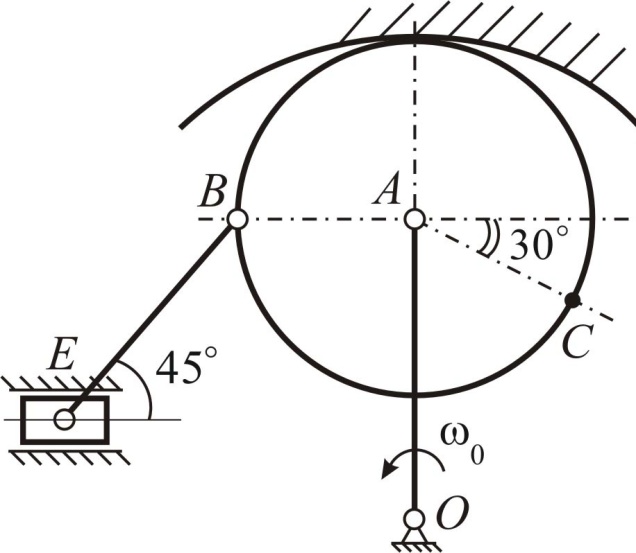
Задача 4.3.
Кривошип ОА
длиной 60 см
вращается ускоренно относительно оси
О
и приводит в движение ролик 1
радиусом
![]() см,
который катится без скольжения по
неподвижному колесу 2
(рис. 4.9). Параметры вращения кривошипа
в данный момент времени
см,
который катится без скольжения по
неподвижному колесу 2
(рис. 4.9). Параметры вращения кривошипа
в данный момент времени
![]() с-1,
с-1,
![]() с-2.
Вычислить угловую скорость
с-2.
Вычислить угловую скорость
![]() и угловое ускорение
и угловое ускорение
![]() ролика, вычислить скорость и ускорение
точки В,
находящейся на ролике на расстоянии 10
см
от точки А.
ролика, вычислить скорость и ускорение
точки В,
находящейся на ролике на расстоянии 10
см
от точки А.

Рис. 4.9
Решение. Кривошип ОА совершает вращательное движение относительно оси, проходящей через неподвижный центр О. Скорость и ускорение точки А кривошипа вычисляют по формулам
![]() (см/с);
(см/с);
![]() .
.
Подвижный ролик движется плоскопараллельно. Вычислим и подвижного ролика. Плоское движение ролика можно привести к мгновенно-вращательному движению относительно мгновенного центра скоростей (МЦС), этим центром является точка касания Р (рис. 4.10).
Запишем уравнение связи между движениями кривошипа и ролика. Точка А одновременно принадлежит кривошипу ОА и ролику 1. Следовательно, перемещение точки А:
![]() ,
т.е.
,
т.е.
![]() .
.
Угловая скорость и угловое ускорение ролика 1 тогда вычисляются:
 (с-1);
(с-1);
 (с-2).
(с-2).
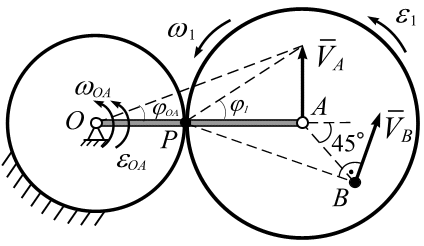
Рис. 4.10
Угол вращения ролика относительно точки Р (точка МЦС) совпадает с углом вращения кривошипа (рис. 4.9). Направления вращения и ролика 1 совпадают, отмечаем их дуговыми стрелками; следовательно, движение ролика 1 является ускоренным, как и кривошипа ОА.
Скорость точки В.
Точка В находится на ролике 1, следовательно, её скорость определяется как скорость точки, вращающейся вокруг МЦС, т.е. точки Р:
![]() .
.
Из геометрии задачи определим по теореме косинусов расстояние ВР:
![]()
![]() (см).
(см).
Тогда скорость точки В:
![]() (см/с).
(см/с).
Вектор
![]() перпендикулярен отрезку ВР
и направлен в сторону вращения
ролика (рис. 4.10).
перпендикулярен отрезку ВР
и направлен в сторону вращения
ролика (рис. 4.10).
Ускорение точки В.
Ускорение точки В складывается из ускорения полюса и ускорения точки В при её вращении вместе с роликом вокруг этого полюса. За полюс примем точку А, т.к. её ускорение известно.
Тогда ускорение точки В запишется (рис. 4.11):
![]() .
.
а |
|
б |
|
Рис. 4.11 |
|||
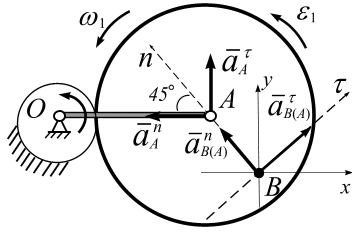

Здесь:
![]() (см/с2)
нормальная составляющая ускорения
полюса, направлена от точки А
к центру О;
(см/с2)
нормальная составляющая ускорения
полюса, направлена от точки А
к центру О;
![]() (см/с2)
касательная составляющая ускорения
полюса, направлена перпендикулярно
(см/с2)
касательная составляющая ускорения
полюса, направлена перпендикулярно
![]() в сторону углового ускорения кривошипа
ОА
в сторону углового ускорения кривошипа
ОА
![]() ;
;
![]() (см/с2)
ускорения точки В
при её вращении относительно полюса А;
вектор
(см/с2)
ускорения точки В
при её вращении относительно полюса А;
вектор
![]() перпендикулярен АВ
и направлен по направлению дуговой
стрелки
;
перпендикулярен АВ
и направлен по направлению дуговой
стрелки
;
![]() (см/с2),
вектор
(см/с2),
вектор
![]() направлен по отрезку АВ
от точки В
к точке А.
направлен по отрезку АВ
от точки В
к точке А.
Выражение для расчета ускорения точки В записано в векторной форме. Для аналитических вычислений необходимо спроецировать это векторное равенство на две оси координат, тогда теорема примет вид
![]() ,
где
,
где
![]()
![]() (см/с2);
(см/с2);
![]()
![]() (см/с2).
(см/с2).
Модуль ускорения точки В вычислим по формуле
![]() (см/с2).
(см/с2).
Для определения
направления вектора полного ускорения
точки В
строится параллелограмм на его проекциях
![]() и
и
![]() ,
диагональ этого параллелограмма и будет
вектором ускорения точки В
(рис. 4.11).
,
диагональ этого параллелограмма и будет
вектором ускорения точки В
(рис. 4.11).
Ответ:
![]() (с-1),
(с-1),
![]() (с-2);
(с-2);
![]() (см/с);
(см/с);
![]() (см/с2).
(см/с2).
Задача 4.4. В
кривошипно-шатунном механизме кривошип
ОА
длиной 40 см
вращается замедленно относительно
центра О,
с угловой скоростью
![]() с-1
и угловым ускорением
с-1
и угловым ускорением
![]() с-2
(рис. 4.12), и приводит в движение шатун АВ
длиной 80 см.
с-2
(рис. 4.12), и приводит в движение шатун АВ
длиной 80 см.

Рис. 4.12
Вычислить:
скорость и ускорение точки В ползуна;
скорость и ускорение точки С, расположенной на шатуне АВ на расстоянии
 см.
см.
Решение. В кривошипно-шатунном механизме кривошип ОА вращается относительно центра О, шатун АВ движется плоскопараллельно, ползун В движется поступательно.
Точка А одновременно принадлежит и кривошипу ОА, и шатуну АВ. Рассматривая вращение кривошипа, скорость точки А рассчитываем по формуле:
![]() (см/с).
(см/с).
Вектор скорости
![]() перпендикулярен кривошипу ОА
и направлен в сторону угловой скорости
кривошипа. Вектор скорости точки В
шатуна направлен вдоль направляющих
ползуна, в данном случае
по горизонтали (рис. 4.12).
перпендикулярен кривошипу ОА
и направлен в сторону угловой скорости
кривошипа. Вектор скорости точки В
шатуна направлен вдоль направляющих
ползуна, в данном случае
по горизонтали (рис. 4.12).
Заменим плоское движение шатуна АВ мгновенно-вращательным относительно мгновенного центра скоростей (МЦС). Для нахождения МЦС восстановим перпендикуляры к построенным векторам скоростей и , на их пересечении будет находиться МЦС шатуна точка Р (рис. 4.13, а).
а |
|
б |
|
Рис. 4.13 |
|||

Направление
мгновенного вращения шатуна АВ
вокруг МЦС
![]()
определяем по направлению вектора
.
определяем по направлению вектора
.
Величина угловой скорости шатуна рассчитывается:
 ,
откуда:
,
откуда:
![]() ,
,
![]() .
.
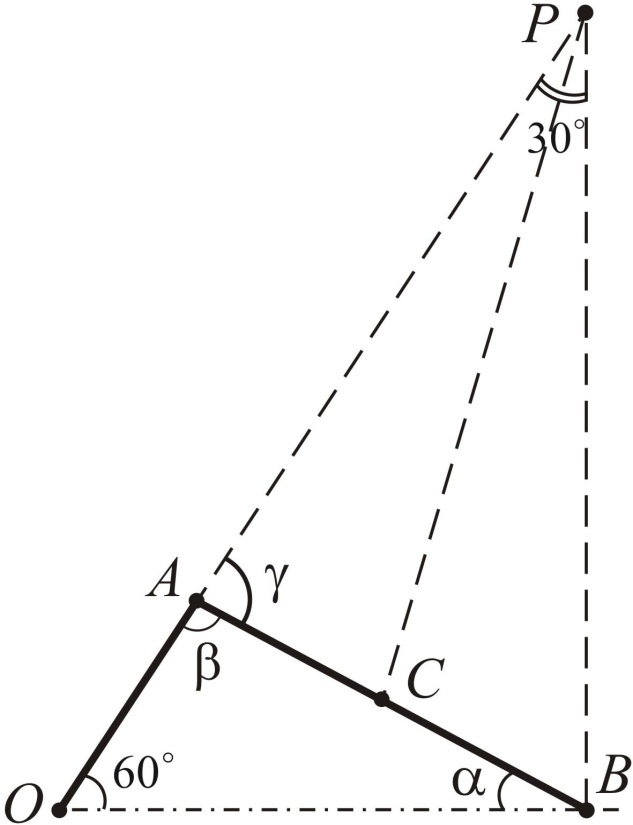
Если положение кривошипно-шатунного механизма фиксировано и начерчено в масштабе, то расстояния ВР и СР измеряются с чертежа линейкой. В общем случае рассматривают геометрию задачи (рис. 4.13, б).
Для вычисления расстояний АР, ВР, СР рассмотрим треугольники ОАВ и ОРВ:
из
![]() по теореме синусов:
по теореме синусов:
![]()
![]()
![]() ;
;
![]() ;
;
![]() ,
,
![]() ;
;
из по теореме синусов:
![]() ;
;
![]() ;
;
![]() см.
см.
В прямоугольном
треугольнике
![]() угол ОРВ
равен
угол ОРВ
равен
![]() ,
поэтому гипотенуза ОР
равна удвоенному произведению катета
ОВ,
лежащего против угла
,
поэтому гипотенуза ОР
равна удвоенному произведению катета
ОВ,
лежащего против угла
![]() :
:
![]() см,
тогда
см,
тогда
![]() см.
см.
По теореме Пифагора расстояние ВР:
![]() см.
см.
Расстояние СР
определяется из
![]() по теореме косинусов, с учетом угла
по теореме косинусов, с учетом угла
![]() :
:
![]()
![]() см.
см.
Угловая скорость шатуна АВ, скорости точек В и С вычисляют следующим образом:
 ,
,
откуда
 с-1;
с-1;
![]() (см/с),
(см/с),
![]() (см/с).
(см/с).
Вектор скорости
![]() перпендикулярен отрезку РС
и направлен в сторону мгновенного
вращения шатуна
перпендикулярен отрезку РС
и направлен в сторону мгновенного
вращения шатуна
![]() (рис. 4.13, а).
(рис. 4.13, а).
Рассчитываем ускорение точки В ползуна. Принимаем точку А шатуна за полюс, тогда
![]() . (а)
. (а)
Здесь (рис. 4.14, а):
![]() ускорение полюса
А:
ускорение полюса
А:
![]()
![]() (см/с2)
;
(см/с2)
;
![]() (см/с2);
(см/с2);
![]() ускорение точки
В
при ее вращении вокруг полюса А:
ускорение точки
В
при ее вращении вокруг полюса А:
![]()
![]() (см/с2),
(см/с2),
![]() .
.
Вектор
![]() направлен по шатуну АВ
от точки В
к точке А;
вектор
направлен по шатуну АВ
от точки В
к точке А;
вектор
![]() располагаем перпендикулярно шатуну
АВ.
располагаем перпендикулярно шатуну
АВ.
Сводим вектора
![]() ,
,
![]() ,
,
![]() ,
в точку В (рис. 4.14, б).
,
в точку В (рис. 4.14, б).
а |
б |
|
|
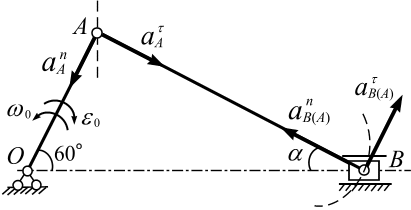
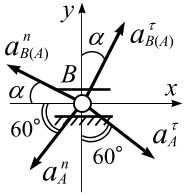
Рис. 4.14
Ускорение точки В определяется векторным уравнением:
![]() . (б)
. (б)
Таким образом,
получили векторное равенство с двумя
неизвестными:
![]() и
и
![]() .
.
Вычислить
и
![]() можно двумя способами
аналитическим и геометрическим.
Рассмотрим каждый из указанных способов.
можно двумя способами
аналитическим и геометрическим.
Рассмотрим каждый из указанных способов.
Аналитический
способ. Начало
декартовой системы координат совместим
с точкой В,
ось
![]() с осью
ползуна, ось
с осью
ползуна, ось
![]() перпендикулярна оси ползуна (рис. 4.14,
б). Вектор ускорения ползуна
перпендикулярна оси ползуна (рис. 4.14,
б). Вектор ускорения ползуна
![]() направлен вдоль оси
,
поэтому проекция вектора
на ось
равна нулю:
направлен вдоль оси
,
поэтому проекция вектора
на ось
равна нулю:
– из (б) получаем:
![]() ,
,
![]() ;
;
![]() ;
;
![]()
![]()
![]() с-2;
с-2;

![]() (см/с2);
(см/с2);
![]() (см/с2).
(см/с2).
Здесь
![]() ,
,
![]() .
.
Вычислим ускорение
точки С.
Положительный знак
означает, что выбранное на схеме
направление этого вектора совпадает с
истинным. Следовательно, угловое
ускорение шатуна
![]() направлено против часовой стрелки (рис.
4.15, а).
направлено против часовой стрелки (рис.
4.15, а).
а |
б |
|
|

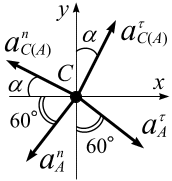
Рис. 4.15
Ускорение точки С:
![]() ,
,
где
![]() (см/с2),
(см/с2),
![]() (см/с2).
(см/с2).
Спроецируем
записанное векторное равенство на оси
![]() и Сy
(рис. 4.14, б):
и Сy
(рис. 4.14, б):
![]()
![]() (см/с2);
(см/с2);
![]()
![]() (см/с2).
(см/с2).
Модуль ускорения точки С:
![]() (см/с2).
(см/с2).
Геометрический (графический) способ
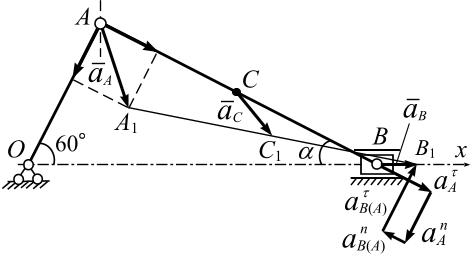
Рис. 4.16
Ускорение ползуна
В
можно получить построением многоугольника
ускорений (рис. 4.16). Для этого в принятом
масштабе откладываем из точки В
ускорение
![]() ,
далее, перпендикулярно ему, откладываем
касательную составляющую ускорения
полюса
,
далее, перпендикулярно ему, откладываем
касательную составляющую ускорения
полюса
![]() ,
под углом
,
под углом
![]() к горизонту откладываем ускорение
к горизонту откладываем ускорение
![]() ,
из его конца проводим пунктирную прямую,
перпендикулярную
(параллельную неизвестному ускорению
)
до пересечения с осью
,
из его конца проводим пунктирную прямую,
перпендикулярную
(параллельную неизвестному ускорению
)
до пересечения с осью
![]() ,
по которой направлен вектор ускорения
ползуна В.
Точка пересечения пунктирной прямой и
осью
определяет вектора
и
.
Вектор
замыкает многоугольник (рис. 4.16).
,
по которой направлен вектор ускорения
ползуна В.
Точка пересечения пунктирной прямой и
осью
определяет вектора
и
.
Вектор
замыкает многоугольник (рис. 4.16).
Измеряем длины этих векторов и с учетом масштаба получаем соответственно:
![]() (см/с2),
(см/с2),
![]() (см/с2).
(см/с2).
Для вычисления
ускорения точки С
– середины шатуна АВ
– соединим концы ускорений точек А
и В
(рис. 4.16) отрезком
![]() ,
разделим его пополам точкой
,
разделим его пополам точкой
![]() и, соединив точки С
и
,
получим вектор ускорения середины
шатуна
и, соединив точки С
и
,
получим вектор ускорения середины
шатуна
![]() .
Замерив его с учетом масштаба, получим
.
Замерив его с учетом масштаба, получим
![]() (см/с2).
(см/с2).
Ответ:
![]() с-1,
с-1,
![]() с-2;
с-2;
![]() (см/с),
(см/с),
![]() (см/с);
(см/с);
![]() (см/с2),
(см/с2),
![]() (см/с2).
(см/с2).
Задача 4.5.
Вычислить аналитически и графически
ускорение шарнира В шарнирного
параллелограмма в его данном положении
(рис. 4.17 а), если кривошип
![]() см вращается равномерно относительно
центра О с угловой скоростью
см вращается равномерно относительно
центра О с угловой скоростью
![]() с-1; длины звеньев
с-1; длины звеньев
![]() см,
см,
![]() см.
см.
а |
|
б |
|
Рис. 4.17 |
|||

Решение. Вычислим
угловые скорости звеньев
![]() – и
– и
![]()
![]() :
:
![]() ,
,
 ;
;
![]() ,
,
 ,
,
Здесь точка Р точка мгновенного центра скоростей шатуна АВ. Его положение определяется точкой пересечения перпендикуляром к векторам скоростей точек А и В (рис. 4.17, б).
Из
![]() определяем расстояния составляют:
определяем расстояния составляют:
![]() см;
см;
![]() см;
тогда:
см;
тогда:
 (с-1);
(с-1);
 (с-1).
(с-1).
Аналитический способ
Применим теорему об ускорениях при плоском движении тела к точке В. За полюс выбираем точку А, ускорение в этой точке известно:
![]() (см/с2);
(см/с2);
тогда: ![]() , (а)
, (а)
здесь
![]() (см/с2);
(см/с2);
![]()
В полученном
векторном уравнении (а) три неизвестных:
модуль и направление ускорения в точке
В
![]() и угловое ускорение шатуна АВ
и угловое ускорение шатуна АВ
![]() (
(![]() ).
).
Для решения задачи
необходимо записать еще одно уравнение.
За второй полюс выберем точку
,
![]() ,
тогда (рис. 4.17 б):
,
тогда (рис. 4.17 б):
![]() ,
(б)
,
(б)
здесь
![]() (см/с2);
(см/с2);
![]()
В полученном
векторном равенстве (б) тоже три
неизвестных: модуль и направление
ускорения в точке В
и угловое ускорение кривошипа
![]()
![]() (
(![]() ).
).
Получили систему уравнений:
![]() (в)
(в)
Исключим вектор
из (в). Для этого приравняем правые части
уравнений (в) между собой, получим
следующее векторное уравнение, которое
будет содержать только две неизвестные
величины –
![]() и
:
и
:
![]() . (г)
. (г)
Совместим с точкой В начало декартовой системы координат (рис. 4.18, а), и спроецируем равенство (г) на эти оси:
![]() ; (1)
; (1)
![]() . (2)
. (2)
Получили систему
двух скалярных уравнений с двумя
неизвестными:
![]() и
и
![]() .
Решая последовательно уравнения (12),
получаем:
.
Решая последовательно уравнения (12),
получаем:
![]() (см/с2);
(см/с2);
![]() (см/с2).
(см/с2).
-
а

б
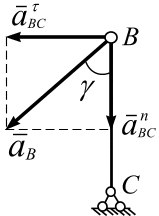
Рис. 4.18
Знак ()
модуля
![]() показывает, что истинное направление
этого вектора противоположно выбранному
на схеме (рис. 4.18, б).
показывает, что истинное направление
этого вектора противоположно выбранному
на схеме (рис. 4.18, б).
Вычислим ускорение точки В:
![]() (см/с2).
(см/с2).
Направление вектора
![]() получаем построением параллелограмма
на векторах
получаем построением параллелограмма
на векторах
![]() и
и
![]() (рис. 4.18, б).
(рис. 4.18, б).
Графический (геометрический) способ
Ускорение шарнира В получим построением многоугольника ускорений (рис. 4.19). Рассмотрим векторное равенство (г):
![]() ,
,
здесь:
![]() (см/с2),
(см/с2),
![]() (см/с2),
(см/с2),
![]() (см/с2).
(см/с2).
В выбранном масштабе
откладываем из точки В,
параллельно ОА,
ускорение
![]() .
Из конца этого вектора в том же масштабе,
параллельно оси звена АВ,
откладываем нормальную составляющую
ускорения
,
и из его конца проводим пунктирную
прямую -,
перпендикулярную
(параллельную неизвестному ускорению
).
Затем из точки В,
в том же масштабе, откладываем нормальную
составляющую ускорения
.
Из конца этого вектора в том же масштабе,
параллельно оси звена АВ,
откладываем нормальную составляющую
ускорения
,
и из его конца проводим пунктирную
прямую -,
перпендикулярную
(параллельную неизвестному ускорению
).
Затем из точки В,
в том же масштабе, откладываем нормальную
составляющую ускорения
![]()
вдоль звена ВС,
из конца этого вектора проводим
перпендикулярную ему пунктирную прямую
-,
параллельную неизвестному ускорению
вдоль звена ВС,
из конца этого вектора проводим
перпендикулярную ему пунктирную прямую
-,
параллельную неизвестному ускорению
![]() (рис. 4.19).
(рис. 4.19).
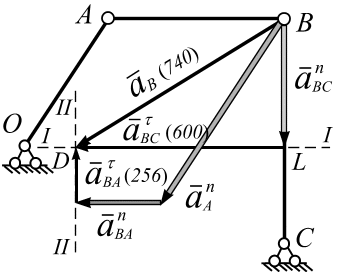
Рис. 4.19
Обозначим точку
пересечения прямых -
и -
буквой D.
Соединим точку В
и точку D,
полученная прямая
![]() соответствует ускорению точки В
соответствует ускорению точки В
![]() ;
прямая
;
прямая
![]() соответствует ускорению
;
прямая
соответствует ускорению
;
прямая
![]() соответствует ускорению
.
Замеряем длину отрезков, с учетом
принятого масштаба, получаем:
соответствует ускорению
.
Замеряем длину отрезков, с учетом
принятого масштаба, получаем:
![]() (см/с2);
(см/с2);
![]() (см/с2);
(см/с2);
![]() см/с2).
см/с2).
Результаты получены двумя разными способами, хорошо согласуются друг с другом.
Ответ:
![]() (см/с2).
(см/с2).
!!! Алгоритм решения
При решении задач на вычисление уравнений движения плоского твердого тела и вычисление скоростей точек, жестко связанных с плоской фигурой, рекомендуется такая последовательность действий:
выбираем неподвижную систему координат и точку С (полюс), жестко связанную с плоской фигурой;
составляем уравнения движения плоской фигуры: определяем координаты полюса относительно неподвижной системы координат
 ,
,
 ;
проводим через точку C
прямую, определяем угол
,
который эта прямая составляет с
горизонтальной неподвижной осью;
;
проводим через точку C
прямую, определяем угол
,
который эта прямая составляет с
горизонтальной неподвижной осью;вычисляем скорость полюса
 и скорость любой точки тела (например,
точки В), как точки, мгновенно
вращающейся вокруг полюса
и скорость любой точки тела (например,
точки В), как точки, мгновенно
вращающейся вокруг полюса
 ;
;вычисляем скорость любой точки, жестко связанной с телом (движущейся вместе с полюсом и вращающейся вокруг полюса), по теореме о скоростях точек тела при его плоскопараллельном движении:
 .
.
Если определить аналитически сложно, находим мгновенный центр скоростей для заданного положения твердого тела, восставляя перпендикуляры к векторам скоростей двух точек плоской фигуры (точки В и С, направление вектора скорости в точках С и В известно), и определяем мгновенную угловую скорость фигуры.
|
Задачи для самостоятельного решения |
||||||||||
|
|
||||||||||
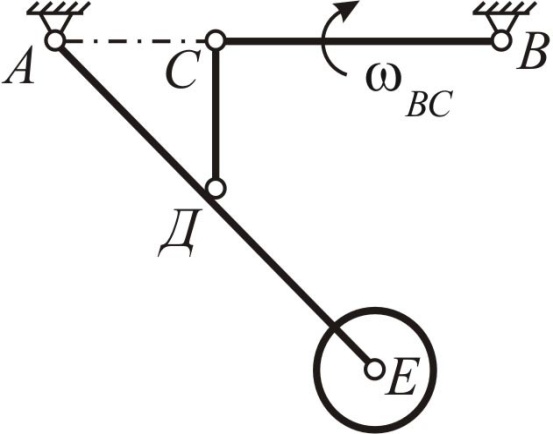
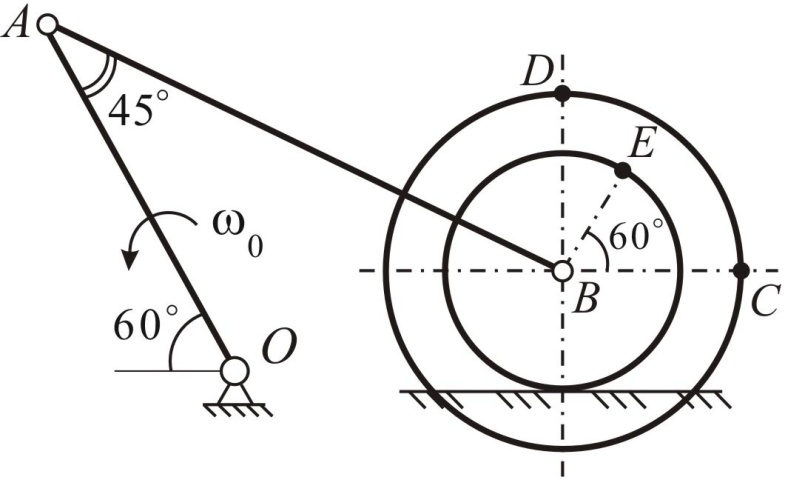
2. В кривошипно-шатунном
механизме кривошип
см
вращается равномерно с
|
|||||||||||
|
|
||||||||||
|
Вычислить при данном положении механизма скорости точек Д, Е и С; ускорение точки Е. |
||||||||||
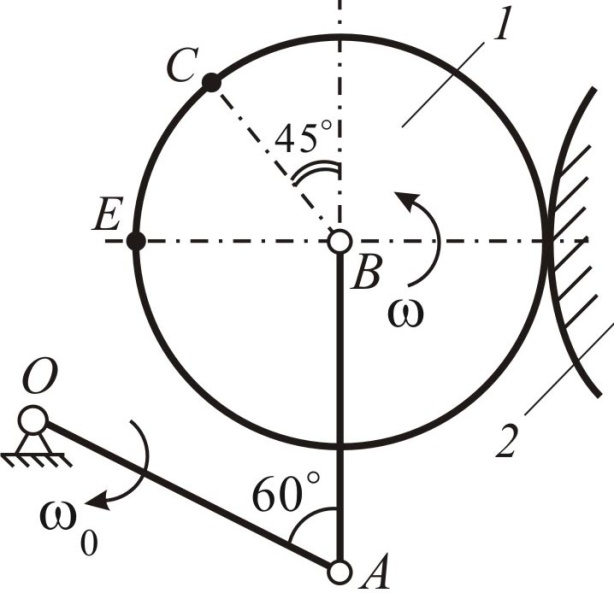
|
5. Кривошип ОА
равномерно вращается с угловой
скоростью
|
||||||||||
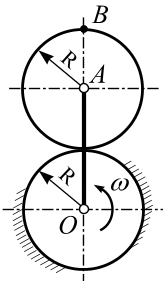
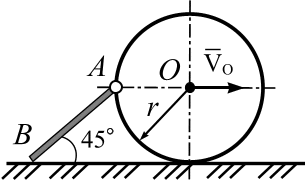
6. Колесо радиусом
|
|||||||||||
|
7. Диск радиусом
см,
катящийся без скольжения по неподвижному
диску того же радиуса, приводится в
движение кривошипом ОА,
который вращается вокруг оси О
с угловой скоростью
|
||||||||||
8. В механизме,
изображенном на чертеже, вычислить
скорости точек А,
В,
|
|||||||||||
|
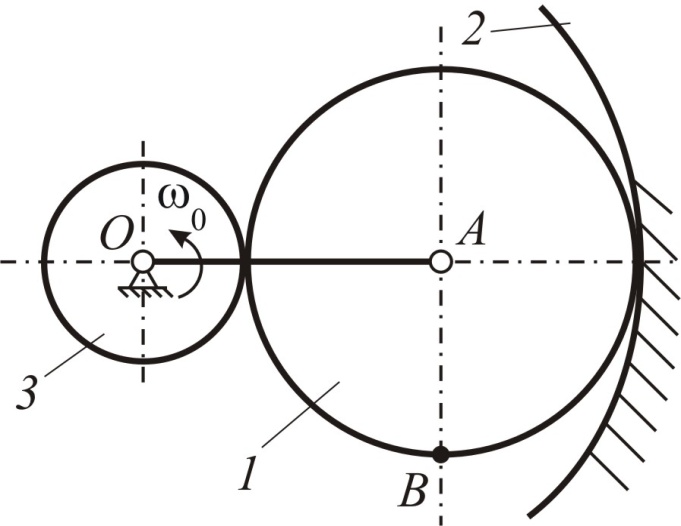
9. Колесо 1 радиусом
|
||||||||||
На одну ось О
с кривошипом ОА
свободно насажено колесо 3
радиусом 20 см,
находящееся во внешнем зацеплении с
колесом 1.
Вычислить угловую скорость
|
|||||||||||
|
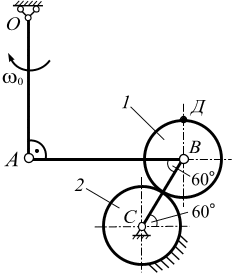
10. Две шестеренки
находятся во внешнем зацеплении и
приводятся во вращательное движение
с помощью кривошипа
Дано:
|
||||||||||
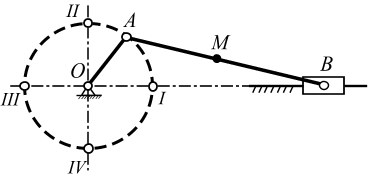
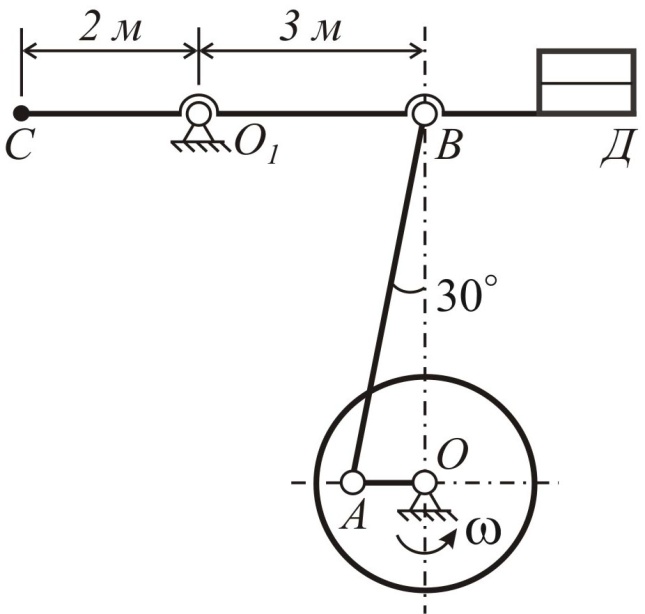
|
11. На чертеже
изображена схема механизма станка-качалки
нефтяного насоса. Колесо вращается
вокруг оси О,
делая 20 об/мин.
Для указанного на чертеже положения
балансир СД
– горизонтален, шарнир А
и точка О
на одной прямой,
Вычислить:
,
|
||||||||||
|
|
||||||||||
12. Колесо радиусом
|
|||||||||||
|
13. На чертеже
изображен кривошипный механизм с
ножной педалью. В данный момент
Для указанного
на чертеже положения механизма
вычислить:
,
|
||||||||||
14. Вычислить
скорость
|
|||||||||||
|
15. Точильный
станок приводится в движение педалью
Дано:
|
||||||||||
|
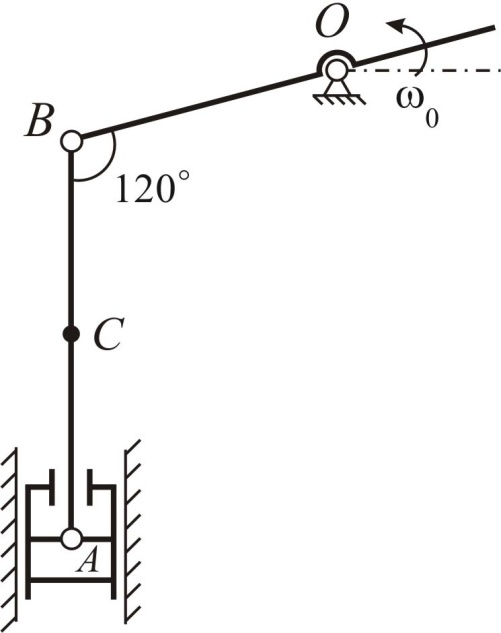
16. На фигуре
изображена схема ручного насоса.
Рукоятка ОВ
вращается с постоянной угловой
скоростью
(1/cек).
Вычислить скорость точки С
в указанном на чертеже положении и
угловую скорость звена ВС,
когда
Вычислить также ускорение точки С и угловую скорость шатуна ВА . |
||||||||||
|
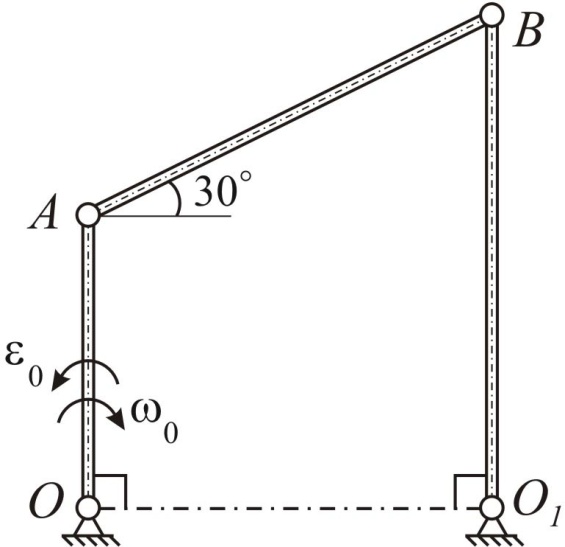
17. При заданном
положении шарнирного механизма
Вычислить в положении, указанном на рисунке, , . |
||||||||||
|
18. Кривошип
Для заданного
положения механизма при
|
||||||||||
|
19. Кривошип
Для заданного
положения механизма вычислить
,
,
если
|
||||||||||
20. Кривошип
|
|||||||||||
|
21. Кривошип
Для заданного положения механизма при с вычислить , . |
||||||||||
|
22. Вычислить
скорость точки
четырехзвенного механизма
|
||||||||||
|
23. Груз
,
связанный посредством нерастяжимой
нити с катушкой
Вычислить скорости
точек
,
,
,
и
катушки в момент
с
в положении, указанном на рисунке, и
угловую скорость катушки, если
|
||||||||||
|
24. К середине
стержня
шарнирного параллелограмма
присоединен с помощью шарнира стержень
Вычислить скорость
ползуна
и угловую скорость стержня
|
||||||||||
|
25. Рассчитать
скорости точек механизма; угловую
скорость и угловое усклорение звена
Дано:
|
||||||||||