

Основное уравнение динамики вращательного движения твердого тела вокруг н еподвижной оси.
(![]() вектор dl/dt)=вектор
M(Ур-ия
движение мат точки относит центра).
Отдельная точка вращ по окр пост R.
dm→(Iz=mR2
момент
инерции мат точки относит z)→dIz=R2dm
б) IzE=Mz,
Iz=const.
dIzEz=IMz
внутр +IMz
внешн| ∫..→
E(∫dIz)=∑Mz
внутр + ∑
Mz внешн
(А) Iz=∫dIz=m∫R2dm
(1)-момент
инерции твердого тела относит оси z.
Определ момента инерции тв тела: z: IzE=Mz
(2)-основное
Ур-ие динамики вращат движуния вокруг
неподвижной оси (проход через центр
тяжести) (2) исп при решении задач.
Справедливо на ось вращ (В) →dLz/dt=Mz
(3), (2) →Iz(dw/dt)=Mz
(Iz=const)
(d(Izw))/dt=Mz
(2|)
из (2|)
и (3) следует Lz=Izw
Для симмм тв тела , вращающ вокруг
неподвижной оси симметрии, можно показать
что L направлен в сторону w. Вектор L=I
вектор w
(4)-связь момента импульса и угловой
ск-ти симметр тв т.
вектор dl/dt)=вектор
M(Ур-ия
движение мат точки относит центра).
Отдельная точка вращ по окр пост R.
dm→(Iz=mR2
момент
инерции мат точки относит z)→dIz=R2dm
б) IzE=Mz,
Iz=const.
dIzEz=IMz
внутр +IMz
внешн| ∫..→
E(∫dIz)=∑Mz
внутр + ∑
Mz внешн
(А) Iz=∫dIz=m∫R2dm
(1)-момент
инерции твердого тела относит оси z.
Определ момента инерции тв тела: z: IzE=Mz
(2)-основное
Ур-ие динамики вращат движуния вокруг
неподвижной оси (проход через центр
тяжести) (2) исп при решении задач.
Справедливо на ось вращ (В) →dLz/dt=Mz
(3), (2) →Iz(dw/dt)=Mz
(Iz=const)
(d(Izw))/dt=Mz
(2|)
из (2|)
и (3) следует Lz=Izw
Для симмм тв тела , вращающ вокруг
неподвижной оси симметрии, можно показать
что L направлен в сторону w. Вектор L=I
вектор w
(4)-связь момента импульса и угловой
ск-ти симметр тв т.
закон сохранения момента импульса. Эксперименты на скамье Жуковского.
Г![]()
![]()
![]()
![]() ироскоп.
1)на карданном вале. Если на ось не лдейств
внешн силы, то она сохран свое
направление.(1) вектор dl/dt=вектор M-момент
внешних сил. вект L=вект
L1+вектL2,
вект L|=вект
L|1+вектL|2
a)
вект M=0→dL/dt=0
→ вект L=const-закон
сохран момента импульса системы. Если
∑ моментов внешних сил,дейст на вращ
тел =0, то момент импульса системы сохран.
вект L=вект
L|
1) до вект L=вект
Lч-c+вект
Lr→вект
L=Iч-cw1+Irw1,
после вект L|=вект
L|ч-c+вект
L|r→вект
L|=I|ч-cw2+I|rw2.
L*=(Iч-c+2mr2)вект
w1=(З.С.М.И)=вект
L=(Iч-c+0)w2,
w2=((Iч-c+2mr2)/Iч-c)w1
→|w2|>|w1|
2) до: ч-с+обруч. вект L=вект
Lч-c+вект
Lобруч
L=0+0.после:
вект L|=вект
L|ч-c+вект
L|обруч
, L|=Iч-cw2+Iобрw1
ироскоп.
1)на карданном вале. Если на ось не лдейств
внешн силы, то она сохран свое
направление.(1) вектор dl/dt=вектор M-момент
внешних сил. вект L=вект
L1+вектL2,
вект L|=вект
L|1+вектL|2
a)
вект M=0→dL/dt=0
→ вект L=const-закон
сохран момента импульса системы. Если
∑ моментов внешних сил,дейст на вращ
тел =0, то момент импульса системы сохран.
вект L=вект
L|
1) до вект L=вект
Lч-c+вект
Lr→вект
L=Iч-cw1+Irw1,
после вект L|=вект
L|ч-c+вект
L|r→вект
L|=I|ч-cw2+I|rw2.
L*=(Iч-c+2mr2)вект
w1=(З.С.М.И)=вект
L=(Iч-c+0)w2,
w2=((Iч-c+2mr2)/Iч-c)w1
→|w2|>|w1|
2) до: ч-с+обруч. вект L=вект
Lч-c+вект
Lобруч
L=0+0.после:
вект L|=вект
L|ч-c+вект
L|обруч
, L|=Iч-cw2+Iобрw1
По З.С.М.И вект L=L|, Iч-cw2+Iобрw1=0, wч=-(Iобр/Iч-с)w1 вращение человека противопол вращ обруча. Iобр/Iчел<<1, |w2|<<|w1| 3) ДО ч-с+обруч. вект L=вект Lч-c+вект Lобр, вект L=0+Iобрw1. ПОСЛЕ. вект L|=вект L|ч-c+вект L|обр , вект L|=Iч-сw2-Iобрw1, по З.С.М.И вект L=0+Iобрw1= вект L|=Iч-сw2-Iобрw1, Iобрw1=Iч-cw2-Iобрw1, w2=(2Iобрw1)/Iч-с.
Моменты инерции простейших: тел мат точки, системы мат точек, однородного стержня. Теорема Штейнера (без доказательства)
![]()
1.мат точка. Iz=mR2 (5)-момент инерции мат точки вокруг неподвижной оси.
2![]()
![]() .система
мат точек. Iz=N∑n=1Izi=N∑n=1
miRi2
(6) момент
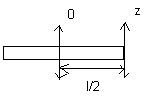
инерции стержня относит оси вращения.
Iz=m∫R2dm.теорема
Штейнера. (I=I0+mR2)
.система
мат точек. Iz=N∑n=1Izi=N∑n=1
miRi2
(6) момент
инерции стержня относит оси вращения.
Iz=m∫R2dm.теорема
Штейнера. (I=I0+mR2)
3.Теорема Штейнера. Момент инерции.
п
 озволяет
зная относительно оси симметрии любой
другой оси параллельной оси симметрии.
озволяет
зная относительно оси симметрии любой
другой оси параллельной оси симметрии.
I0'=I0+ma2
Iz=I0+m(l/)=ml2/12+ml2/4=ml2/3
гироскоп. Процессия.
Г![]()
![]()
 ироскопы-
быстровращающееся симметричное тв
тело. Вект L=Iz
вект w
, вект dL/dt=вект M (1). Ось может перемещ, а
центр неподвижен. А) M=0→(1)вект
dL/dt=0→L=const.
L-жестко
связан с осью гироскопа, поэтому ось
гироскопа сохран направление. гирокомпас,
стабилиз направл.б) M||оси
z,
вект L.вект
My=[вект
ry*Fy],
My↑↑L,
MT↑↓L
My-ускоряет
вращение MT-тормозит
вращение Эти моменты будут лишь менять
w по величине, но не по направл.
(1)→(d(Izw))/dt=M→z:
Iz(dw/dt)=My-MT,
dw/dt=Ez,
IzE=My-MT,
Ez=(My-MT)/Iz-углов
упт.вращ гироскопа, если My>MT,то
EZ>0(ускорение)
My<MT→Ez<0.
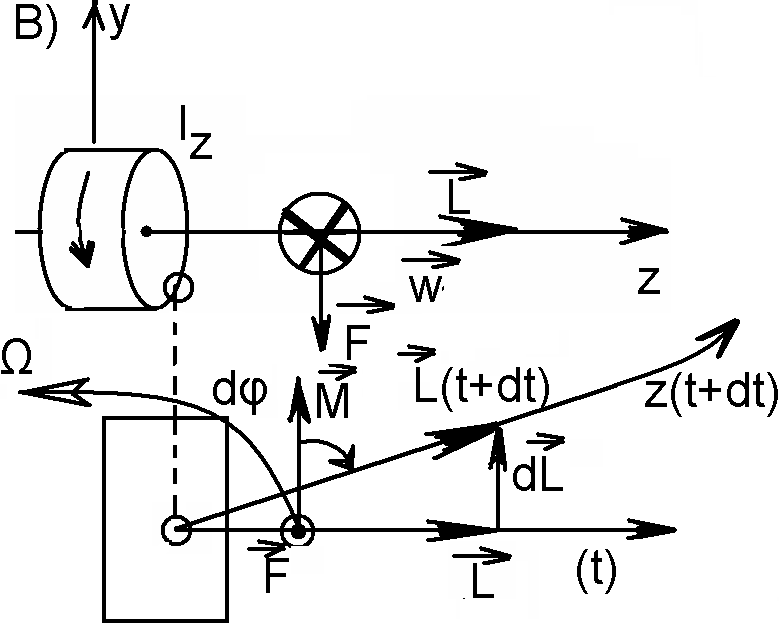
в) поведение вращ героскопа определ
напр момента силы. Вект M+[вект
r,F]. Пустьь момент времени t, M(t)
следоват момент времени t+dt→вект L(t+dt).
(t→L(t),
t+dt→L(t+dt))
→dt→вект
dL→L(t+dt)-L(t)
→ L9t+dt0=L(t)+dL.
Ось гироскопа жестко связана с L, если
мы узнаем направление L(t+dt),
то зная положение оси в момент времени
t, найдем её в момент времени (t+dt). dL/dt=M
(1) →dL=Mdt→вект
dL↑↑вект
M.
Ось за время dt, поверн на угол dφ вокруг
вертик оси y. Ось гироскопа под действ
такой силы будет вращ вокруг вертик
оси. Дв-ие гироскопа наз прецессия.
Ωприц=dφ/dt=(1/L)(dL/dt)=из
геометрии(dL=Ldφ-длина
дуги окр с рад R кот поверн под углом
dφ)=M/L.
Ωприц=M/L=(rF)/(Izw)-угловая
ск-ть прецессии.
ироскопы-
быстровращающееся симметричное тв
тело. Вект L=Iz
вект w
, вект dL/dt=вект M (1). Ось может перемещ, а
центр неподвижен. А) M=0→(1)вект
dL/dt=0→L=const.
L-жестко
связан с осью гироскопа, поэтому ось
гироскопа сохран направление. гирокомпас,
стабилиз направл.б) M||оси
z,
вект L.вект
My=[вект
ry*Fy],
My↑↑L,
MT↑↓L
My-ускоряет
вращение MT-тормозит
вращение Эти моменты будут лишь менять
w по величине, но не по направл.
(1)→(d(Izw))/dt=M→z:
Iz(dw/dt)=My-MT,
dw/dt=Ez,
IzE=My-MT,
Ez=(My-MT)/Iz-углов
упт.вращ гироскопа, если My>MT,то
EZ>0(ускорение)
My<MT→Ez<0.
в) поведение вращ героскопа определ
напр момента силы. Вект M+[вект
r,F]. Пустьь момент времени t, M(t)
следоват момент времени t+dt→вект L(t+dt).
(t→L(t),
t+dt→L(t+dt))
→dt→вект
dL→L(t+dt)-L(t)
→ L9t+dt0=L(t)+dL.
Ось гироскопа жестко связана с L, если
мы узнаем направление L(t+dt),
то зная положение оси в момент времени
t, найдем её в момент времени (t+dt). dL/dt=M
(1) →dL=Mdt→вект
dL↑↑вект
M.
Ось за время dt, поверн на угол dφ вокруг
вертик оси y. Ось гироскопа под действ
такой силы будет вращ вокруг вертик
оси. Дв-ие гироскопа наз прецессия.
Ωприц=dφ/dt=(1/L)(dL/dt)=из
геометрии(dL=Ldφ-длина
дуги окр с рад R кот поверн под углом
dφ)=M/L.
Ωприц=M/L=(rF)/(Izw)-угловая
ск-ть прецессии.