

Рычаг Жуковского.
Построение:
Изображаем
повернутый на 90° план скоростей. Наносим
на данный план все действующие силы,
моменты заменяем парами сил, например:![]() на
на
![]() и
и
![]() ;
;
![]() на
на
![]() и
и
![]() ;
на
;
на
![]() и
и
![]() ;.
Полученный план скоростей и будет
рычагом Жуковского (рисунок 2.9).
;.
Полученный план скоростей и будет
рычагом Жуковского (рисунок 2.9).
Определим численные значения пар сил:
Из полюса Р проводим линию параллельно движению ползуна и из точки а. Параллельно линии АК (с плана ведущего звена). Получаем точку К, из которой откладываем FУ.
Составим сумму моментов всех сил, приложенных к рычагу Жуковского, относительно полюса Р.


Определим
уравновешивающий момент
![]() :
:
![]()
где
![]() - масштаб с
кинематический схемы механизма.
- масштаб с
кинематический схемы механизма.
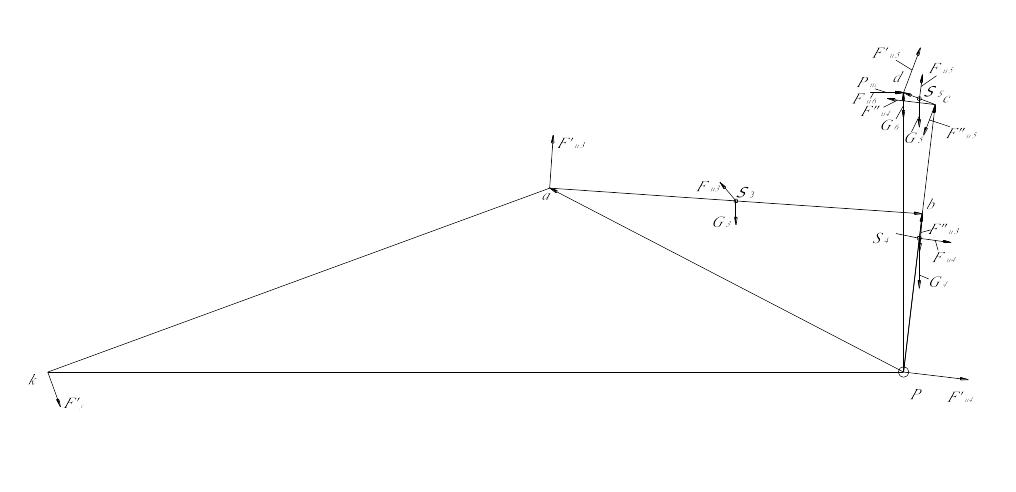
Рисунок 2.9 Рычаг Жуковского
Определение погрешности вычисления:
![]()
Погрешность не превышает 5%, следовательно, расчеты проведены, верно.
3. Расчёт маховика
3.1. Построение диаграммы зависимости момента сил полезного сопротивления в функции угла поворота ведущего звена
Момент сил полезного сопротивления рассчитывается по формуле:
![]()
где Рi - сила полезного сопротивления;
Vi - скорость той точки i-ого звена, к которому приложена Рi;
![]() - угол между
векторами
- угол между
векторами
![]() и
и
![]() ;
;
Мi - внешний момент, приложенный к звену i;
![]() - угловая скорость
того звена, к которому приложен момент
Мi;
- угловая скорость
того звена, к которому приложен момент
Мi;
![]() -
угловая скорость звена приведения.
-
угловая скорость звена приведения.
В данном случае уравнение примет вид:
![]()
Рассчитаем значения моментов сил полезного сопротивления для каждого положения механизма. Результаты запишем в таблицу 3.1. Строим диаграмму, откладывая по оси ординат полученные значения моментов сил полезного сопротивления в масштабе, а по оси абсцисс значения углов поворота кривошипа 1 соответственно (рисунок 3.1).
Масштаб диаграммы зависимости момента сил полезного сопротивления в функции угла поворота ведущего звена:
![]()
где
![]() -
максимальное
значение момента полезного сопротивления
(таблицы. 3.1);
-
максимальное
значение момента полезного сопротивления
(таблицы. 3.1);
![]() -
максимальная ордината на диаграмме
моментов.
-
максимальная ордината на диаграмме
моментов.
Масштаб угла поворота:
![]() ,
,
где L=240 мм - длина отрезка 0-12 по оси ординат на диаграмме.
Таблица 3.1. Значения момента сил полезного сопротивления.
Параметры |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
9,42 |
||||||||||||
|
1,823 |
2,215 |
1,133 |
0,362 |
0,108 |
0,541 |
0,961 |
1,244 |
1,24 |
0,854 |
0,269 |
0 |
|
|
0 |
0 |
0 |
0 |
6500 |
6500 |
6500 |
6500 |
6500 |
6500 |
6500 |
0 |
|
|
0 |
0 |
0 |
0 |
74,52 |
373,3 |
663,11 |
858,39 |
855,63 |
589,28 |
185,62 |
0 |
|