

1.3. Построение планов ускорений.
Определение линейных ускорений точек механизма происходит в той же последовательности, что и определение линейных скоростей (рис 1.3). Ускорение точки А кривошипа состоит из нормальной и тангенциальной составляющих:
![]() .
.
По модулю :
![]()
Вектор нормального ускорения направлен вдоль прямой АО2 от точки А к центру О2 . Модуль тангенциального ускорения определится:
![]()
так как кривошип АО2 вращается с постоянной угловой скоростью.
Выбрав полюс π
и величину
отрезка
![]() ,
изображающего вектор
,
изображающего вектор
![]() ,
определяют
масштаб плана ускорений:
,
определяют
масштаб плана ускорений:
![]()
Откладывая вектор ускорения точки А из полюса π параллельно звену О2А в направлении от А к О2, обозначают конец вектора стрелкой и буквой а.
Переходя к первой двухповодковой группе, определяем ускорение точки В − кинематической пары, соединяющей звенья 3 и 4. Для ускорения точки В составляется система векторных уравнений:
![]() ,
,
![]() .
.
С целью упрощения решения каждый вектор следует разложить на два составляющих вектора: нормального и тангенциального ускорений:
![]() ,
,
где
![]() ─
нормальная составляющая ускорения
точки В при ее относительно вращательном
движении вокруг точки А;
─
нормальная составляющая ускорения
точки В при ее относительно вращательном
движении вокруг точки А;
![]() ─
тангенциальная
составляющая ускорения точки В при ее
относительно вращательном движении
вокруг точки А;
─
тангенциальная
составляющая ускорения точки В при ее
относительно вращательном движении
вокруг точки А;
![]() ,
,
![]() ─
нормальная
составляющая ускорения точки В при ее
относительно вращательном движении
вокруг точки О3;
─
нормальная
составляющая ускорения точки В при ее
относительно вращательном движении
вокруг точки О3;
![]() ─
тангенциальная
составляющая ускорения точки В при ее
относительно вращательном движении
вокруг точки О3.
─
тангенциальная
составляющая ускорения точки В при ее
относительно вращательном движении
вокруг точки О3.
В систему векторных
уравнений не вошли
![]() =0
и
=0
и
![]() =0
по причине равномерного вращения точки
А и неподвижности точки О3.
=0
по причине равномерного вращения точки
А и неподвижности точки О3.
Модули нормальных ускорений определяются по известным формулам:
![]() ;
;
 .
.
Направлено нормальное ускорение параллельно звену АВ от точки В к точке А. Тангенциальное ускорение неизвестно по модулю, но известно по направлению. Оно направлено перпендикулярно звену АВ. Нормальное ускорение направлено параллельно звену О3В от точки В к точке О3, а тангенциальное ускорение − перпендикулярно О3В.
Окончательно уравнение для определения ускорения точки В примет вид:
![]() ,
,
в котором два неизвестных параметра и , и которое может быть решено графически, путем построения плана ускорений.
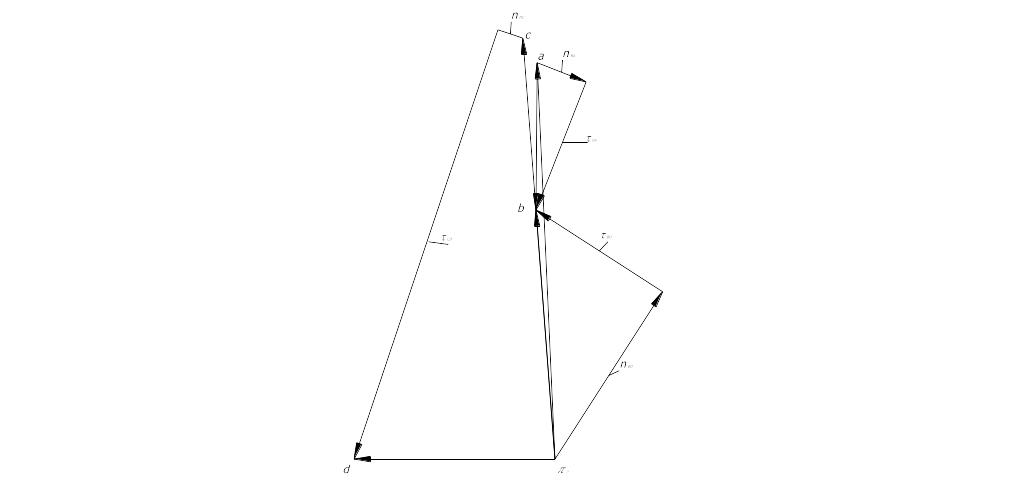
Рисунок 1.3 План ускорений.
На плане ускорений
векторы нормальных
,
![]() и касательных ускорений
,
будем для удобства записи обозначать
и касательных ускорений
,
будем для удобства записи обозначать
![]() .
.
Величины нормальных ускорений на плане определяем аналитически по формулам:
Через точку а
плана ускорения (рис.1.3)
проводим
линию, параллельную звену АВ и откладываем
на ней в направлении от точки В к точки
А вектор
![]() .
Это есть вектор относительного нормального
ускорения
.
Через конец этого вектора проводим
прямую, перпендикулярную звену АВ. Эта
прямая является линией действия
касательного ускорения
.
Это есть вектор относительного нормального
ускорения
.
Через конец этого вектора проводим
прямую, перпендикулярную звену АВ. Эта
прямая является линией действия
касательного ускорения
![]() .Затем
нужно построить левую часть последнего
уравнения. Для этого из полюса π
проводим линию параллельную звену О3В
и откладываем на ней в направлении от
точки В к точки О3
вектор
.Затем
нужно построить левую часть последнего
уравнения. Для этого из полюса π
проводим линию параллельную звену О3В
и откладываем на ней в направлении от
точки В к точки О3
вектор
![]() .
Через конец этого вектора проводим
прямую, перпендикулярную звену О3В,
которая является линией действия
касательного ускорения
.
Через конец этого вектора проводим
прямую, перпендикулярную звену О3В,
которая является линией действия
касательного ускорения
![]() .
Пересечение линий, по которым действуют
касательные ускорения
и
,
позволяет получить точку в.
Вектор
.
Пересечение линий, по которым действуют
касательные ускорения
и
,
позволяет получить точку в.
Вектор
![]() изображает
полное ускорение точки в,
модуль которого равен:
изображает
полное ускорение точки в,
модуль которого равен:
![]() .
.
Модули касательных ускорений:
![]() ;
;
![]() .
.
Ускорение WВА находится:
![]() .
.
По теореме подобия находим ускорение точки с:
![]() ,
откуда
,
откуда
![]() .
.
Модуль этого ускорения:
![]()
Ускорение точки д определяется, решая векторное уравнение:
![]() ,
,
![]() ─
нормальная
составляющая ускорения точки D
при ее относительно вращательном
движении вокруг точки С;
─
нормальная
составляющая ускорения точки D
при ее относительно вращательном
движении вокруг точки С;
![]() ─
тангенциальная
составляющая ускорения точки D
при ее относительно вращательном
движении вокруг точки С.
─
тангенциальная
составляющая ускорения точки D
при ее относительно вращательном
движении вокруг точки С.
В этом выражении
векторы
![]() и
известны. Вектор направлен от точки D
к точке С, а модуль этого вектора
определяем по формуле:
и
известны. Вектор направлен от точки D
к точке С, а модуль этого вектора
определяем по формуле:
![]() .
.
Кроме того, известно
направление линии действия вектора
−
перпендикулярно прямой СD,
и направление линии действия вектора
![]() −
вдоль горизонтальной линии, по которой
перемещается ползун.
−
вдоль горизонтальной линии, по которой
перемещается ползун.
Из точки с
проводим
вектор
![]() ,
параллельный звену
CD:
,
параллельный звену
CD:
![]() ,
,
направленный от
точки D
к точке С. Это есть вектор относительного
нормального ускорения
.
Через конец этого вектора проводим
прямую перпендикулярно звену DС.
Эта прямая является линией действия
касательного ускорения
![]() .
Затем через полюс
.
Затем через полюс
![]() проводим
прямую параллельно направляющей х-х.
Точка пересечения двух прямых определит
конец вектора
проводим
прямую параллельно направляющей х-х.
Точка пересечения двух прямых определит
конец вектора
![]() .
.
Величина полного ускорения точки D определится по формуле:
![]() .
.
Измерив затем длину вектора , находим модуль касательного ускорения:
![]() .
.
Ускорение WDC находится:
![]() .
.
Угловые ускорения
звеньев определяются на основе
построенного плана ускорений. Ведущее
звено вращается равномерно и
![]() .
.
Угловое ускорение звена 3 по модулю определится через тангенциальное ускорение:
![]() ,
,
а его направление
укажет вектор
,
мысленно перенесенный с плана ускорений
в точку В механизма. Условно закрепляя
точку А звена 3, направление вектора
покажет,
что
![]() направлено
против часовой стрелки. Звено 4 вращается
с угловым ускорением
направлено
против часовой стрелки. Звено 4 вращается
с угловым ускорением
![]() ,
определяемым по формуле:
,
определяемым по формуле:
![]() .
.
Направление углового ускорения ε 4 находим перенося вектор в точку В механизма и рассматривая действие этого вектора относительно шарнира О3. Как это видно из чертежа, звено стремится, как бы повернуться по часовой стрелке. Следовательно, в этом направлении действует .
Находим величину углового ускорения ε 5 звена СD:
![]() .
.
Направление его определяется аналогично и данном случае действует против часовой стрелки.
Для механизма, изображенного в положении 8:

![]()

Аналогично строится план ускорений для других 3 положений механизма, и полученные вычисления занесем в таблицу 1.2.
Таблица 1.2. Значения линейных и угловых ускорений точек и звеньев механизма.
Параметры |
6 |
8 |
2 |
3 |
|
7,276 |
|||
|
2,3977 |
0,9671 |
2,909 |
0,1798 |
, |
2,6376 |
2,5234 |
26,7367 |
13,2154 |
, |
0,0669 |
3,6509 |
11,579 |
2,7968 |
, |
4,1025 |
2,766 |
16,2005 |
10,1249 |
|
4,1031 |
4,5804 |
19,9131 |
10,5041 |
|
3,6843 |
2,7016 |
26,8945 |
13,2167 |
|
0,9366 |
8,3173 |
32,5135 |
10,0032 |
|
6,9348 |
7,7415 |
33,6559 |
17,7743 |
, |
0 |
0,483 |
1,529 |
0,1011 |
|
0,9366 |
8,3032 |
32,4776 |
10,0027 |
|
6,9978 |
3,6864 |
21,2968 |
18,6839 |
|
12,268 |
11,737 |
124,357 |
61,467 |
|
28,891 |
19,479 |
114,088 |
71,302 |
|
0,9366 |
8,3032 |
32,4776 |
10,0027 |