

Содержание:
Задание на курсовой проект………………………………….………………….......................3
Введение…………………………………………………….…………………….......................4
1. Кинематический анализ механизма
1.1. Построение кинематической схемы механизма………………………………………….5
1.2. Построение планов скоростей……………………………………………………………..7
1.3.Построение планов ускорений…………………………………………………………….12
1.4. Построение диаграммы перемещения точки D………………………………………….18
1.5. Построение диаграммы скоростей………………………………………………………..20
1.6. Построение диаграммы ускорений……………………………………………………….21
1.7. Определение погрешностей по скоростям и ускорениям….…………….......................22
2. Кинетостатический расчет плоского механизма.
2.1. Построение кинематической схемы механизма…………………………………………24
2.2. Построение плана ускорения…………………………………………………………......24
2.3. Расчет структурной группы 5-6………………………………………………………......27
2.4. Расчет структурной группы 3-4………………………………………………………......32
2.5. Расчет ведущего звена…………………………………………………………………......36
2.6. Рычаг Жуковского…………………………………………………………………………39
2.7. Определение погрешности вычисления………………………………………………….41
3. Расчет маховика.
3.1. Диаграмма зависимости момента сил полезного сопротивления в функции угла поворота ведущего звена……………………………………………………………………….42
3.2. Диаграмма работ сил полезного сопротивления в функции угла поворота ведущего звена……………………………………………………………………………………………..43
3.3. Кривая изменения работ сил движущих...………..…………………………………........43
3.4. Кривая изменения моментов сил движущих...……..…………………………………….43
3.5. Диаграмма приращения кинетической энергии в функции угла поворота ведущего звена……………………………………………………………………………………………..44
3.6. Диаграмма зависимости приведённого момента инерции в функции угла поворота ведущего звена………………………………………………………………………………….46
3.7. Диаграмма Виттенбауэра……………………………………………….…………………47
3.8. Определение размеров маховика…………………………………………………………49
Список литературы…………………………………………………………………………….51
Введение
В данном курсовой работе рассмотрены задачи связанные с кинематическим расчетом механизма, силовым анализом механизма и расчетом маховика.
Данная курсовая работа даст представление как определять скорости, ускорения, силы действующие на звенья и рассчитывать маховик.
Умение применить эти навыки, полученные в при разработке этого курсового проекта понадобятся в дальнейшем.
1. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА.
1.1. Построение кинематической схемы механизма.
Механизм строится в 12 положениях ведущего звена в масштабе μl (рисунок 1.1). Масштаб μl рассчитывается по формуле:
![]() ,
,
где
![]() – истинная длина O2A
в метрах (
=0,082м);
– истинная длина O2A
в метрах (
=0,082м);
![]() – отрезок в миллиметрах с плана механизма,
который характеризует истинную длину
звена O2A
и выбирается
произвольно. В нашем случае
– отрезок в миллиметрах с плана механизма,
который характеризует истинную длину
звена O2A
и выбирается
произвольно. В нашем случае
![]() .
Таким образом, масштаб μl
оказывается равен
.
Таким образом, масштаб μl
оказывается равен
![]()
Рассчитываем чертежные значения остальных звеньев AB, CD, О3C О3B и координаты расположения опоры O3 по следующим формулам:
![]()
![]()
![]()
![]()
![]()
![]()
Здесь LAB, LCD, LО3С, LО3В, X, Y истинные длины в метрах.
Выбираем на
плоскости точку О2.
Из точки O2
радиусом
проводим траекторию движения точки А.
От точки O2
вверх и влево откладываем значения
![]() мм. и
мм. и
![]() мм. соответственно. Получаем точку O3.
От нее откладываем радиусом
мм. соответственно. Получаем точку O3.
От нее откладываем радиусом
![]() траекторию движения точки В. Для того
чтобы найти крайнее левое положение
ползуна, нужно из точки O2
провести радиус длиной
траекторию движения точки В. Для того
чтобы найти крайнее левое положение
ползуна, нужно из точки O2
провести радиус длиной
![]() .
В результате на пересечении получаем
точку В. Из точки O3
проводим отрезок
.
В результате на пересечении получаем
точку В. Из точки O3
проводим отрезок
![]() ,
при этом точка В лежит на нем. Затем из
точки С откладываем отрезок
,
при этом точка В лежит на нем. Затем из
точки С откладываем отрезок
![]() ,
заранее задав прямую, вдоль которой
будет двигаться ползун D.
Аналогично строится крайнее правое
положение механизма, только из точки
O2
откладывается
отрезок с длинной
,
заранее задав прямую, вдоль которой
будет двигаться ползун D.
Аналогично строится крайнее правое
положение механизма, только из точки
O2
откладывается
отрезок с длинной
![]() .
В этих положениях скорость ползуна
равна 0. Разбиваем окружность на 12 равных
частей. Затем из точки А проводим радиус
длинной
.
В этих положениях скорость ползуна
равна 0. Разбиваем окружность на 12 равных
частей. Затем из точки А проводим радиус
длинной
![]() .
Далее построения аналогичны.
.
Далее построения аналогичны.
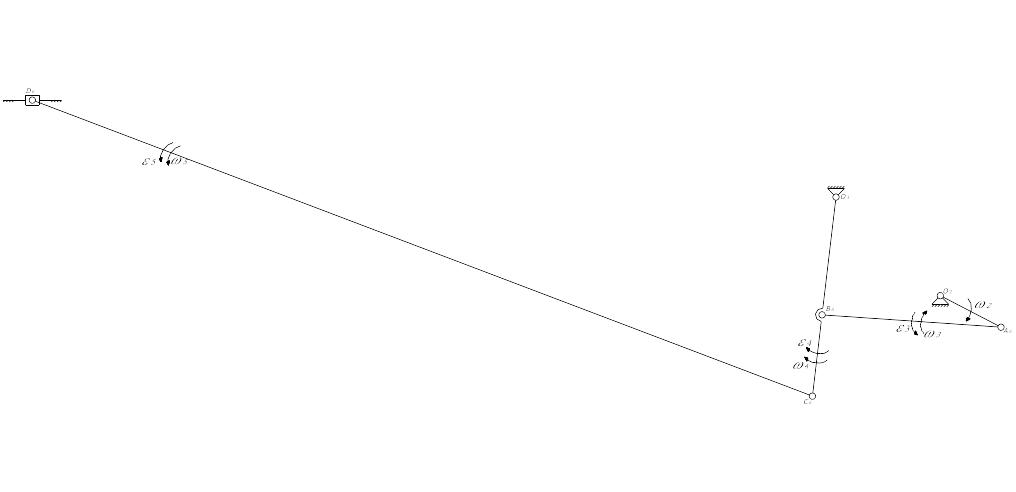
Рисунок 1.1. Схема механизма.