

Минобрнауки России
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Юго-Западный государственный университет»
(ЮЗГУ)
Кафедра теоретической механики и мехатроники
Отчёт
По дисциплине: «Учебно-исследовательская работа студентов»
На тему: «Проектирование мехатронного модуля лапы шагающего робота»
Выполнил: ст. гр. МТ-91
Гаина К. В.
Проверил: пр.Тарасова Е.С.
Яцун С.Ф.
Курск, 2012 г.
Содержание
Заключение 19
Цель данного проекта –спроектировать мехатронный модуль лапы шагающего робота.
При проектировании мехатронного модуля лапы шагающего робота следует учесть повышенные требования, предъявляемые к точности системы автоматического управления, связанные с особенностями конструкции.
С развитием научно-технического прогресса, внедрением новых технологий в различных областях производства, в том числе вредного и опасного, возникает необходимость в мобильных устройствах специального назначения, способных работать, например, в зоне высокой радиоактивности (при обслуживании ядерных реакторов), при тушении лесных пожаров или в зонах стихийных бедствий.
Наиболее полно этим требованиям, скорее всего, будут отвечать шагающие роботы
Шагающий способ представляет основной интерес для движения по заранее неподготовленной местности с препятствиями. Традиционные колесные и гусеничные транспортные машины оставляют за собой непрерывную колею, тратя на это значительно большую энергию, чем в случае передвижения шагами, когда взаимодействие с грунтом происходит только в местах упора стопы. Помимо этого шагающий способ передвижения обладает и большей проходимостью на пересеченной местности вплоть до возможности передвигаться прыжками, преодолевать препятствия и т.п. При шагающем способе меньше разрушается грунт.
Анализ существующих конструкций
Анализ техники ходьбы по количестве точек опоры шагающих роботов можно разделить на две, четыре, шесть. Рассмотрим особенности каждого из них.
Рассмотрим применение шагающего робота с двумя конечностями.
С давних пор идея прямохождения волнует воображение конструкторов и механиков. При проектировании шагающих роботов, передвигающихся на двух конечностях, исследователи вычленяют две основные проблемы. Во-первых, необходимо добиться, чтобы во время движения аппарат мог какое-то время устойчиво находиться в положении, когда его опорой является только одна конечность. При этом опора должна иметь достаточную прочность, чтобы выдержать всю массу агрегата, а приводы - достаточную мощность, чтобы обеспечивать поступательное движение. Второе - это сложные алгоритмы движения, имитирующие движения человеческого тела даже при обыкновенной ходьбе. Взаимосвязь между движениями отдельных частей двуногого робота, обеспечивающая ему устойчивое движение не только по прямой линии, но и в пространстве
Обратив свое внимание на четвероногих животных, можно заметить, что при движении они сохраняют равновесие почти исключительно за счет динамической устойчивости. Условием устойчивого равновесия является требование, чтобы при движении центр тяжести такого робота в любой момент находился в пределах воображаемого треугольника, углами которого являются опорные в настоящий момент конечности. Исходя из этого, был разработан шагающий агрегат на четырех конечностях, алгоритм движения которого был определен таким образом, чтобы при его движении в любой момент времени в воздухе находилась только одна нога, а корпус имел опору одновременно на три точки и сохранял при этом статическую устойчивость.
Шестиногие шагающие роботы, по-видимому, являются самой многочисленной из всех когда-либо и где-либо разработанных категорий механизмов, способных перемещаться с помощью искусственных ног. Популярность этих роботов в значительной степени обусловлена тем, что проблемы обеспечения статической устойчивости движущихся шестиногих аппаратов решаются относительно просто по сравнению с другими конструкциями. Одной из проблем, которой уделяется существенное внимание при проектировании мобильных шагающих аппаратов, является уменьшение необходимой мощности источников питания и сокращение затрат энергии. Другими словами, необходимо повысить к.п.д. многоногих механизмов, т.е. уменьшить потребляемую мощность и повысить полезную развиваемую мощность. В самом деле, если учесть, что в общем случае каждая из n конечностей имеет две-три степени подвижности и управление каждой из степеней сопряжено с определенными затратами энергии, то очевидно, что сравнение шагающих и колесных транспортных средств по к.п.д. будет далеко не в пользу первых. В связи с этим, по-видимому, главная цель, к достижению которой должны стремиться исследователи сегодня, заключается в создании экспериментальных шагающих аппаратов, способных на практике продемонстрировать сочетание высоких функциональных возможностей с достаточно большой развиваемой мощностью при малых затратах энергии
Моделью с шестью ногами мы сможем продемонстрировать знаменитую походку «треножником», т е. с опорой на три ноги, которую используют большинство существ. На следующих рисунках темный кружок означает, что нога устойчиво поставлена на землю и поддерживает вес существа. Светлый кружок означает, что нога поднята и находится в движении. На рис 1 показано наше существо в позиции «стояния». Все ноги опираются о землю. Из положения «стояния» наше существо решает идти вперед. Для того чтобы сделать шаг, оно поднимает три из своих ног (см. светлые кружки на рис. 2), опираясь своим весом на три оставшиеся ноги (темные кружки). Заметьте, что ноги, поддерживающие вес (темные кружки), расположены в форме треножника (треугольника). Такая позиция является устойчивой, и робот не может упасть. На рис. 3 показано три остальные ноги (светлые кружки) могут двигаться и двигаются вперед. На рис. 4 перенос центра тяжести на других три опоры (тёмные кружки) и движение вперёд свободных ног (белые кружки).
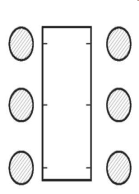


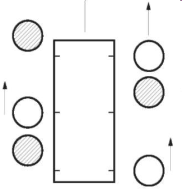 Рис.1
Исходное Рис.2. Первый ша Рис.3 Перенос
Рис.4 Второй шаг
Рис.1
Исходное Рис.2. Первый ша Рис.3 Перенос
Рис.4 Второй шаг
положение центра тяжести
Обзор существующих конструкций.
Создатели робота из Васедовского университета (Waseda University) в Токио и японская робототехническая компания Tmsuk надеются, что однажды, с помощью созданного ими двуногого робота люди, пользующиеся инвалидными колясками, смогут подниматься и спускаться по лестницам, а также переносить тяжелые вещи по неровным поверхностям.
Робот с батарейным питанием, под кодовым названием WL-16, по сути представляет собой алюминиевое кресло, закрепленное на двух группах телескопических ног. Ноги заканчиваются плоскими плитами, которые выполняют функцию ступней
Для движения вперед, назад и в сторону WL-16 использует 12 приводов; при этом он способен нести взрослого человека весом до 60 килограммов. Робот может корректировать свою «осанку» и двигаться плавно, даже если человек в кресле поворачивается или меняет свое положение. В настоящее время он может шагать вверх и вниз всего лишь на несколько миллиметров, однако команда разработчиков надеется, что в будущем он сможет ходить по обычным лестницам.

Рис. 5
На сегодняшний день, одним из самых известных творений компании Boston Dynamics, принимающей активное участие в создании робота Urban Hopper, является робот BigDog.(рис. 6) Этот четвероногий робот предназначен для передвижения по пересеченной местности, переноса тяжелых грузов и способен преодолевать возвышенности и ямы. Робот собака предназначен для армии США – рабочее название Big Dog.
Эти роботы могут бегать за солдатами, красться, использоваться для транспортировки грузов. Компания Boston Dynamics на сегодняшний день – одна из лидеров в разработке искусственного интеллекта и навигационных систем. Эти достижения позволяют роботу-собаке самостоятельно В тоже время Big Dog достаточно защищен, и по словам конструкторов может быть выведен из строя только прямым попаданием ракеты.
На сегдоняшний день эти роботы еще не готовы для массового использования в армии США, но Министерство обороны возлагает большие надежды на эту разработку, и планирует запуск проекта по использованию Big Dog в ближайшие годы. Робот рассматривается как эффективное средство транспортировки, что позволит уменьшить количество амуниции и снаряжения, переносимых солдатами, и повысить их скорость и мобильность в бою.


рис.6
Разработанный в сверхсекретном и сверхинтересном агентстве DARPA (Агентство по перспективным оборонным научно-исследовательским разработкам США) в сотрудничестве с Boston Dynamycs, этот робот стал кульминацией многолетних разработок. Он может развивать скорость до 2 метров в секунду, ориентироваться на любой местности, преодолевать практически любые ямы, бугры и болота. Этот гексапод (на человеческом языке - "шестилап") способен передвигаться на расстояние до 3,7 км без подзарядки. Благодаря герметичному корпусу, RHex (рис.7) не боится даже воды. Управляется робот оператором, предел досягаемости 600 метров. Есть видеокамера и GPS приемник. Очевидно, основной задачей робота будет разведка.
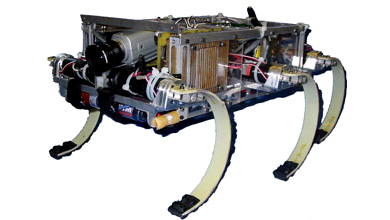 Рис.
7
Рис.
7
Техническое задание
Произвести моделирование привода мехатронного модуля лапы шагающего робота.
Технические требования
Система аварийного останова (кнопочная, беспроводная);
Обеспечить скорость линейного перемещения робота в диапазоне от 0 до 2 м/с
Температура: -20- +30°С
Влажность: 10-80%
Давление: 760 +/- 20 мм рт. ст..
Масса: 1.5-2 кг.
Бортовая сеть обеспечивает напряжение от 6 В.
Размер электронных схем – не более 100 мм в ширину и 200 мм в длину.
Энергопотребление электронных схем – до 1 А информационные схемы, до 2 А – силовые схемы.
Конструкция и принцип работы

Рис.8 (вид с верху)
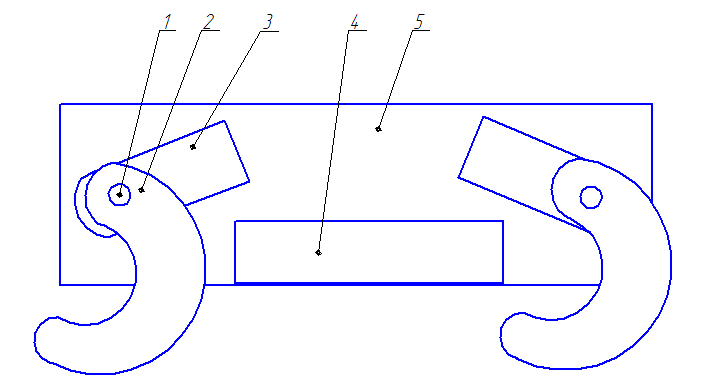
Рис.9 (вид сбоку)
Робот состоит из корпуса 5, на котором закреплены приводы 3, на выходном волу привода расположена втулка 1, на которой закреплена лапа 2. Питания робота осуществляется с помощью аккумулятора 4, длины L1 и L2 выбраны разные для того что бы лапы робота могли бы двигаться асинхронно не мешая друг другу.