

Оглавление
1. Введение 3
1.1. Краткое описание работы механизмов плунжерного насоса 3
1.2. Исходные данные. 5
2. Лист 1:Проектирование зубчатой передачи 6
2.1. Исходные данные и постановка задачи 6
2.2. Алгоритм расчета эвольвентного зубчатого зацепления 6
2.3. Выбор коэффициента смещения X1 8
2.4. Построение эвольвентного зубчатого зацепления 9
2.5. Построение станочного зацепления 10
2.6. Выводы 11
3. Синтез планетарного редуктора 12
3.1. Исходные данные: 12
3.2. Постановка задачи: 12
3.3. Основные условия проектирования многосателлитного планетарного редуктора: 12
3.4. Подбор чисел зубьев планетарного редуктора 13
3.5. Построение схемы планетарного редуктора и диаграммы распределения угловых и линейных скоростей 14
3.6. Выводы: 15
4. Лист 2: Динамическое исследование основного механизма 16
4.1.1.1. Исходные данные: 16
4.2. Постановка задачи: 16
4.3. Геометрический синтез основного механизма 17
4.4. Динамическая модель 19
4.5. Определение суммарного приведенного момента инерции 19
4.6. Определение суммарного приведенного момента 20
4.7. План скоростей 20
4.8. Определение передаточной функции VqB 21
4.9. Определение и 21
4.10. Определение передаточной функций 22
4.11. Построение приведенного момента инерции 2-ой группы звеньев 23
4.12. Построение графика приведенного момента 24
4.13. Построение приближенного графика 25
4.14. Определение необходимого момента инерции маховых масс 26
4.15. Определение закона движения начального звена механизма 26
4.16. Выводы 27
5. Лист 3: Синтез кулачкового механизма 28
5.1. Исходные данные и постановка задачи 28
5.2. Построение кинематических диаграмм 28
5.3. Построение вспомогательной диаграммы 29
5.4. Профилирование кулачка 29
5.5. Проверка передаточных функций 30
5.6. Выводы 31
6. Список литературы: 31
Введение
Краткое описание работы механизмов плунжерного насоса
Вертикальный одноцилиндровый плунжерный насос простого действия (рис.63а) предназначается для перекачки жидкостей. Основной механизм насоса — кривошипно-ползунный 1,2,3.
Рабочий процесс в цилиндре совершается за один оборот кривошипа I.
При движении плунжера вверх происходит всасывание жидкости в цилиндр при давлении Pmin, близком к атмосферному (Pmin≈0), при движении плунжера вниз — нагнетание жидкости в трубопровод 5 при давлении Pmax (см. индикаторную диаграмму насоса(рис.63б)).
Коленчатый вал I кривошипно-ползунного механизма приводится во вращение от электродвигателя 6 через зубчатую передачу 7, 8 с неподвижными осями колес и планетарный редуктор 9,10,11,12 (рис.63в).
Для обеспечения требуемой неравномерности движения на кривошипном валу I закреплен маховик 13 (см. рис.63в).
Смазка механизма осуществляется от масляного насоса кулачкового типа.
Схема кулачкового механизма 14-15 представлена на рис.63г. Схематичное изображение закона изменения ускорения толкателя 15 дано на рис.63д.
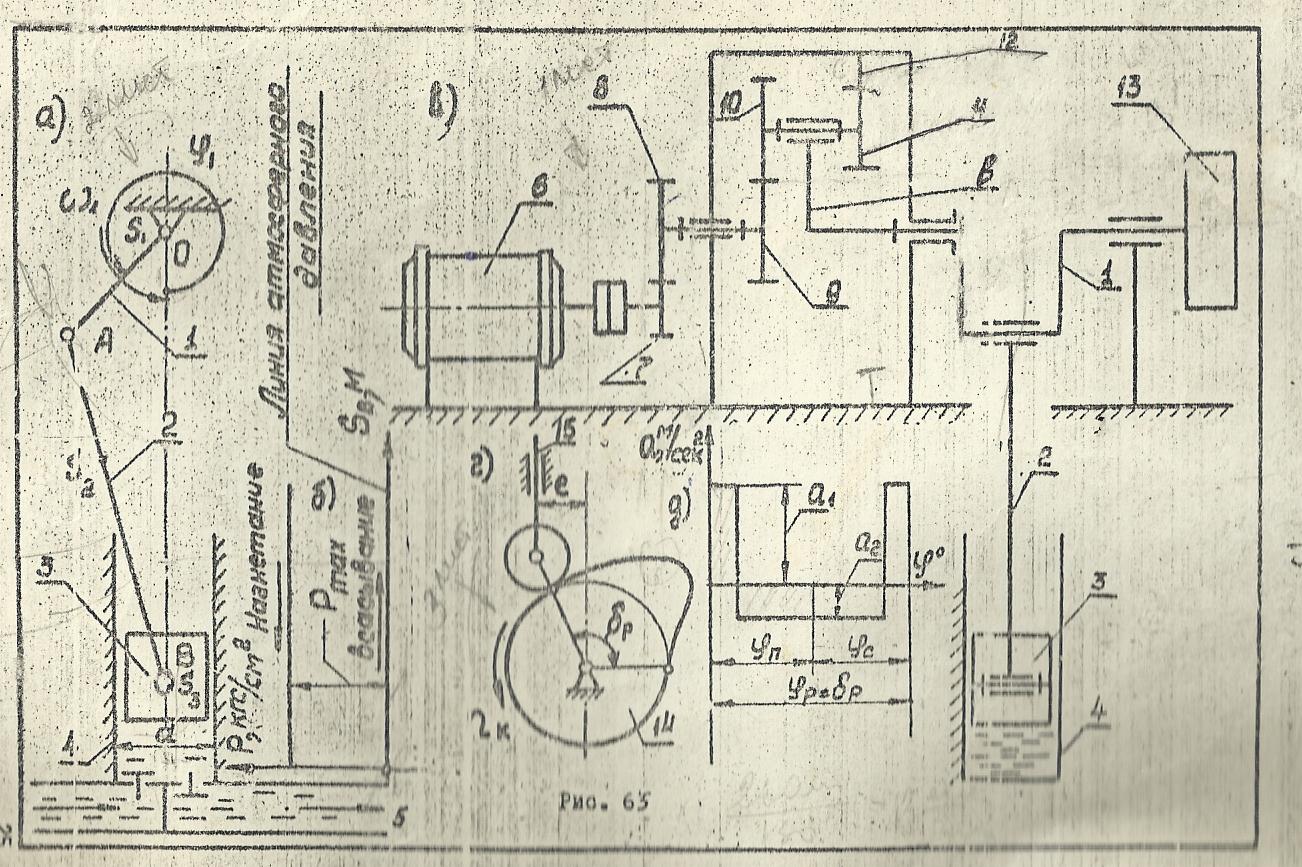
Рис.1 Схема механизмов плунжерного насоса
Исходные данные.
№ П/П |
Наименование параметра |
Обозначение |
Размерность |
Числовое значение |
1 |
Средняя скорость плунжера 3 насоса |
Vcp |
м/сек |
0,4 |
2 |
Число оборотов коленчатого вала I |
n1 |
рад/с |
10,78 |
3 |
Отношение длины шатуна 2 к длине кривошипа I |
Lab/loa |
_ |
4,3 |
4 |
Отношение расстояния от точки В до центра тяжести шатуна к длине шатуна |
Las2/lab |
_ |
0,32 |
5 |
Максимальное давление жидкости в цилиндре насоса |
Pmax |
Па |
4,5*105 |
6 |
Диаметр циллиндра 4 |
d |
м |
0,12 |
7 |
Масса шатуна 2 |
G2 |
Кг |
2,5 |
8 |
Масса плунжера 3 |
G3 |
Кг |
5 |
9 |
Момент инерции шатуна относительно оси, приходящей через его центр тяжести |
J2s |
Кг*м2 |
0,06 |
10 |
Коэффициент неравномерности вращения вала I |
δ |
_ |
1/15 |
11 |
Момент инерции коленчатого вала без маховика |
Jb |
Кг*м2 |
1 |
12 |
Угловая координата кривошипа для силового расчета |
φ1 |
град |
300 |
13 |
Числа зубьев колес 7 и 8 |
z7 z8 |
- - |
12 20 |
14 |
Модуль зубчатых колес 7 и 8 |
m |
мм |
2,5 |
15 |
Число оборотов электродвигателя 6 |
nэ.д. |
рад/с |
150,72 |
16 |
Число сателлитов в планетарном редукторе |
K |
_ |
3 |
17 |
Число оборотов кулачка |
nk |
рад/с |
10,47 |
18 |
Величина подъема толкателя кулачкового механизма |
h |
м |
0,005 |
19 |
Рабочий угол профиля кулачка |
δp |
град |
125O |
20 |
Максимально допустимый угол давления в кулачковом механизме |
αдоп |
град |
30O |
21 |
Внеосность толкателя кулачкового механизма |
l |
м |
0,003 |
22 |
Соотношение между величинами ускорений толкателя |
|
_ |
2 |