

47. Следящие системы двустороннего действия
В классической следящей системе оператор воздействует на задающую рукоятку, а сигнал о её перемещении сравнивается с сигналом обратной связи от датчика положения рабочего органа. Недостатком такой системы является то, что оператор физически не чувствует того усилия
сопротивления, которое возникает на валу между двигателем и рабочим органом. В то же время, в некоторых случаях желательно (или даже необходимо), чтобы оператор ощущал противодействие, оказываемое рабочим органом, воздействуя на задающий орган. Это позволяет осуществить следящая система двустороннего действия, структура которой представлена на рис.1:
Р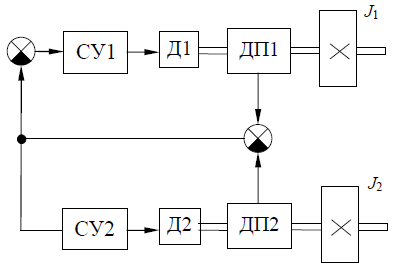 ис.1
- Структура симметричной следящей
системы двустороннего действия
ис.1
- Структура симметричной следящей
системы двустороннего действия
Оператор своей рукой поворачивает задающую рукоятку J1. При этом возникает рассогласование между сигналами от датчиков положения вала оператора ДП1 и вала нагрузки ДП2. Это рассогласование подаётся напрямую на систему управления СУ2 основным двигателем Д2 и инверсно на систему управления СУ1 двигателем небольшой мощности Д1, вал которого соединён с задающей рукояткой. В результате, двигатель Д2 создаёт момент, которой стремится повернуть вал «основной двигатель - нагрузка» с моментом инерции J2 в прямом направлении, а двигатель Д1 создаёт момент, который препятствует повороту рукоятки оператором. Чем больше рассогласование по положению, тем больше создаваемые двигателями моменты. Таким образом, сопротивление повороту задающей рукоятки будет пропорционально моменту сопротивления на валу «основной двигатель - нагрузка», что и создаёт для оператора «ощущение» нагрузки.
Д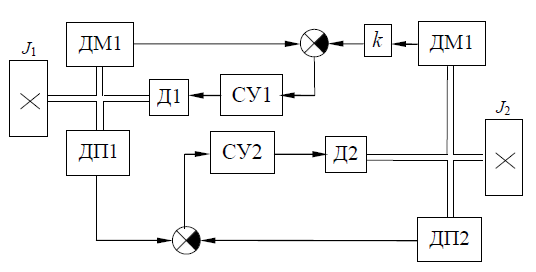 ля
повышения точности и чувствительности
может применяться несимметричная
система (рис. 2)
ля
повышения точности и чувствительности
может применяться несимметричная
система (рис. 2)
Рис. 2 - Структура несимметричной следящей системы двустороннего действия
В целом, она построена аналогично симметричной. Отличие заключается в том, что здесь на обоих валах устанавливаются датчики момента ДМ1 – на валу оператора, ДМ2 – на валу нагрузки. Управление силовым двигателем осуществляется в функции рассогласования по положению, а вот для управления двигателем Д1 используется сигнал рассогласования моментов. Причём, сигнал от датчика ДМ1 умножается на коэффициент k, который, как правило, меньше единицы, поскольку усилие на валу нагрузки обычно больше, чем на валу задающей рукоятки. В некоторых случаях необходимо предусмотреть определённые ограничения при управлении двигателем, сочленённым с рукояткой оператора, так как случайно возникшие на рабочем валу динамические усилия могут травмировать оператора.
48. Пневмопривод. Элементы пневмопривода
Пневмоприводом - называется устройство, для приведения в движение рабочих машин и механизмов посредством сжатого газа и управление этим движением.
В качестве газа используется атмосферный воздух ( как самый дешёвый).
Структура пневмопривода:
У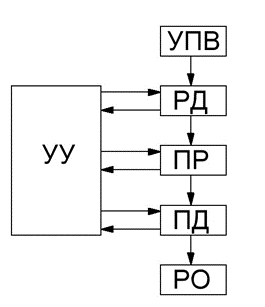 ПВ
-устройство подготовки воздуха
(компрессор);
ПВ
-устройство подготовки воздуха
(компрессор);
РД - регулятор давления, поддерживает определенное давление сжатого воздуха;
ПР - пневмораспределитель; ПД – пневмодвигатель;
РО - рабочий орган; УУ -устройство управления.
Достоинства: 1) Малые габариты рабочих органов; 2) Плавность работы; 3) Пожаробезопасность; 4) Экологичность; 5) Конструктивная простота и т.д.
Основным преимуществом пневмопривода перед гидроприводом - это возможность передачи энергии на достаточно большие расстояния.
Недостатки: 1) Низкое быстродействие; 2) Малый КПД; 3) Малые развиваемые усилия.
Главным недостатком пневмопривода является ограничение по развиваемому усилию и моменту из-за сжимаемого газа.
В основном гидропривод применяется в:
1. Схватах роботов и манипуляторов; 2. Приводах механических тормозов, для открывания/закрывания дверей; 3. Для привода подвижных частей контактов в высоковольтной аппаратуре (дистанционное управление).
Обычно, пневмоприводы имеют дискретное электромагнитное управление ( то есть с помощью пневмораспределителей (пневмокранов) с электромагнитным управлением). Кроме того встречаются пневмоприводы вращательного действия с помощью пневмомоторов.
Основные типы пневмомоторов такие же как и гидромоторов.
П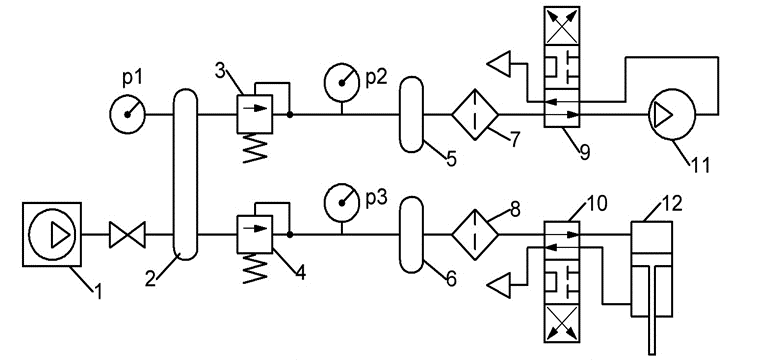 ример
построения пневмопривода: Где
применены следующие элементы пневмопривода:
ример
построения пневмопривода: Где
применены следующие элементы пневмопривода:
1 - Компрессорная установка;
2 - Ресивер высокого давления (ёмкость для накопления сжатого воздуха);
3, 4 - регуляторы давления до уровней р2 и рЗ соответственно ( то есть редукционные клапаны);
5, 6 - ресиверы давлений р2 и рЗ ( то есть пониженного давления);
7, 8 –фильтры для очистки от твёрдых частиц и капель масла;
9, 10 - пневмораспределители (пневмокраны) с электромагнитным управлением;
11 - пневмомотор; 12 -пневмоцилинд р.
В данной схеме происходит разделение на два рабочих давления р2 и рЗ.
В отличие от гидропривода, где циркулирует одно и тоже количество жидкости, в пневмоприводе воздух совершивший механическую работу – стравливается в атмосферу.
В качестве компрессоров в пневмоприводах обычно используются: поршневые, винтовые, спиральные (то есть объёмного действия).