

4 3. Гидроприводы с объемным регулирование.
Объемное регулирование представляет собой регулирование скорости рабочего органа за счет изменения рабочих объемов насоса и гидромотора. Сюда же можно отнести и регулирование скорости рабочего механизма за счет изменения частоты вращения вала насоса.
Q~V0·n.
1. Регулирование за счет изменения рабочего объема насоса

 – относительный
рабочий объем насоса.
– относительный
рабочий объем насоса.
В данном случае мы получаем регулирование скорости с постоянством момента гидродвигателя. Ограничение момента статических характеристик обусловлено применением предохранительного клапана, который устанавливается на выходе насоса.
Р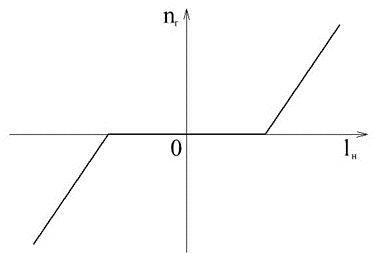 еверсирование
в такой схеме возможно двумя способами:
еверсирование
в такой схеме возможно двумя способами:
1)за счет гидродвигателя;
2) реверсирование потоком жидкости;
Второй способ применяется только в системах с замкнутой циркуляцией. В случае реверсирования за счет изменения потока жидкости в насосе возникает зона нечувствительности, обусловленная внутренними утечками в насосе.
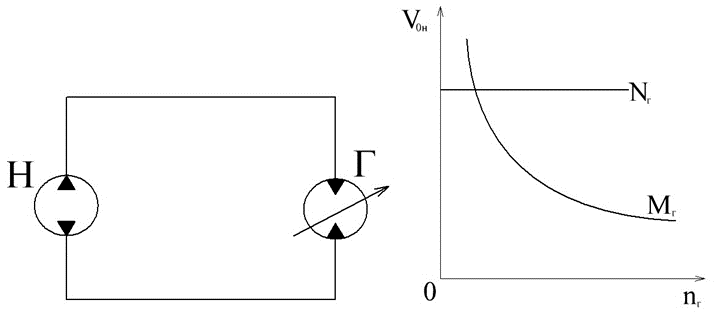
2. Объемное регулирование за счет изменения рабочего объема гидромотора.
Д анный
способ применяется только при использовании
в качестве гидродвигателя гидромотора.
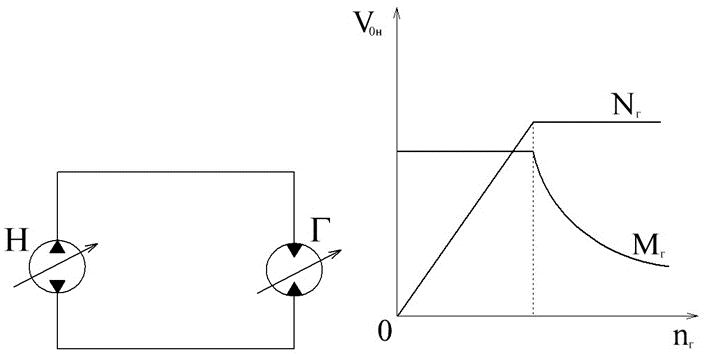
Если насос вращается с постоянной
частотой, то регулирование происходит
при постоянстве мощности. При уменьшении
рабочего объем гидромотора
от единицы до
анный
способ применяется только при использовании
в качестве гидродвигателя гидромотора.
Если насос вращается с постоянной
частотой, то регулирование происходит
при постоянстве мощности. При уменьшении
рабочего объем гидромотора
от единицы до
 частота
вращения вала гидромотора будет
увеличиваться, а момент на гидровалу –
уменьшаться. С уменьшением рабочего
объема гидромотра наклон механических
характеристик увеличивается, поскольку
объемные потери в гидромоторе влияют
сильнее. Ограничение характеристик
осуществляется за счет предохранительного
клапана.
частота
вращения вала гидромотора будет
увеличиваться, а момент на гидровалу –
уменьшаться. С уменьшением рабочего
объема гидромотра наклон механических
характеристик увеличивается, поскольку
объемные потери в гидромоторе влияют
сильнее. Ограничение характеристик
осуществляется за счет предохранительного
клапана.
Теоретически при ограниченном рабочем объеме гидромотора lГ=0 частота вращения гидромотора стремится к бесконечности nГ→∞.
В реальности при приближении lГ к нулю вначале возникает неустойчивая работа, а затем гидромотор останавливается из-за малого развиваемого им момента.
3. Регулирование изменением рабочих объемов насоса и гидромотора.
Д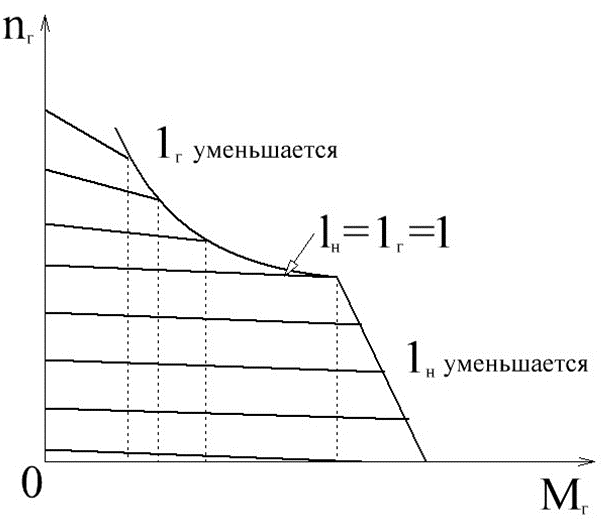 анный
способ применяется для увеличения
диапозона регулирования. Последовательность
разгона привода при регулировании
изменением рабочих объемов насоса и
гидромотра:
анный
способ применяется для увеличения
диапозона регулирования. Последовательность
разгона привода при регулировании
изменением рабочих объемов насоса и
гидромотра:
1) Увеличить рабочий объем насоса от до 1.
2)
При
 =1
уменьшить рабочий объем гидродвигателя
lГ
от 1 до lГ.мин.
=1
уменьшить рабочий объем гидродвигателя
lГ
от 1 до lГ.мин.
44. Сравнение способов регулирования гидропривода.

Наибольшей жесткостью обладают характеристики при объемном регулировании. Хар –ка 2 имеет достаточно высокую жесткость при малых нагрузках, но с ротором нагрузки жесткость падает. Хар –ка 3 является мягкой при малых нагрузках, а с ростом нагрузки ее жесткость возрастает.
Зависимость КПД цепи управления от нагрузки:
КПД цепи управления характеризует потерю энергии в регулирующем устройстве.

Как видно из графиков наибольший КПД обеспечивается про объемном регулировании (график 1). Немного хуже график паралл. Включении дросселя(3) .Наихудшая зависимость при последовательном дросселировании, где при полной загрузке КПД<40%.
Таким образом, из всех способов регулирования наилучшим является объемное регулирование, недостатком объемного регулирования является необходимость использования специальных машин, кот. Стоят дорого.
Кроме вышеперечисленных способов регулирования можно отметить еще 2 способа регулирования без внесения гидравлических потерь:
1) регулирование изменением частоты вращения вала насоса
2) для получения нескольких фиксированных скоростей гидродвигателя может использоваться система из нескольких насосов с разными производительностями. Получение определенной скорости происходит за счет подключения соответствующего насоса.