

11. Способы пуска дпт.
Рис 10-2 Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rp в = 0.
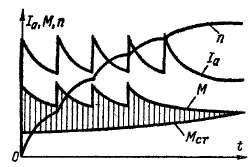
При положении контакта Я пускового реостата на контакте / (t = 0) возникают токи 1а и iB, а также момент М, и если М > Мст, то двигатель придет во вращение и скорость п будет расти со значения п — 0 (рис. 10-3). При этом в якоре будет индуктироваться э. д. с. Ег^п и, согласно выражениям (10-1J) и (10-8), 1а и М, а также скорость нарастания п будут уменьшаться. Изменение этих величин' при Мст = const происходит по экспоненциальному закону.
Когда 1а достигнет значения Л» мин = (Ы -*■ 1,3) /н, контакт Я пускового реостата переведется на контакт 2. Вследствие уменьшения Rn ток 1а ввиду малой индуктивности цепи якоря почти мгновенно возрастет, М также увеличится, п будет расти быстрее и в результате увеличения Еа величины 1а и М снова будут уменьшаться (рис. 10-3). Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигает установившегося режима работы со значениями /о и п, определяемыми условиями М=М„ [см. равенства (10-7) и (10-8)].
Рис 10-3 Зависимость 1ф М и п от времени при пуске двигателя
При пуске на холостом ходу М„ = Мо. Ток 1а — 1а0 в этом случае мал и составляет обычно 3—8% от /н.
Заштрихованные на рис. 10-3 ординаты представляют собой, согласно выражению (10-2), значения избыточного, или динамического, момента
под воздействием которого происходит увеличение п.
Количество ступеней пускового реостата и величины их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключения ступеней максимальные и минимальные значения 1а на всех ступенях получились одинаковыми. По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рис. 10-2 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рис. 10-2, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени пускового реостата. Поскольку их сопротивление по сравнению с RB = rB + Rp B мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рис. 10-2, б), которые поочередно шунтируются контактами Kl, К2, КЗ автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1—2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает не сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость п, согласно выражению (10-7), будет сильно увеличиваться («разнос» двигателя). ° результате ток якоря значительно возрастет и возникнет круговой
![]()
огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Параллельную обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток гв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения (см. § 10-4).
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается -от схемы пуска двигателя параллельного возбуждения (рис. 10-2), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
12. Способы регулирования частоты вращения ДПТ.
Регулирование скорости. Угловую скорость двигателя при неизменном моменте сопротивления можно регулировать тремя способами: 1)якорным – изменением напряжения на обмотке якоря Uя; 2)полюсным – изменением магнитного потока возбуждения Фв; 3)реостатным – изменением добавочного сопротивления Rд в цепи якоря. Регулировочные характеристики двигателей независимого возбуждения при якорном и полюсном способах управления будут подробно рассмотрены в разделе исполнительных двигателей. При реостатном способе через реостаты Rд должен длительно пропускаться значительный ток, что вызывает большие потери мощности, поэтому данный способ неэкономичен и применяется редко.
Способы регулирования скорости вращения двигателей постоянного тока следуют из соотношений. Возможны три способа регулирования скорости вращения.
1. Наиболее удобным, распространенным и экономичным является способ регулирования скорости путем изменения потока Ф6, т. е. тока возбуждения tB.
С уменьшением Фа, согласно выражению (10-7), скорость возрастает. Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Фе, т. е. с наименьшей величиной п. Поэтому практически можно только уменьшать Ф^.
Следовательно, рассматриваемый способ позволяет регулировать скорость вверх от номинальной. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, в частности мала мощность реостатов для регулирования тока возбуждения. К тому же при уменьшении iB мощность возбуждения Шв уменьшается.
Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями ее коммутации.
При высоких скоростях коммутация ухудшается вследствие увеличения вибрации щеточного аппарата, неустойчивости щеточного контакта и возрастания реактивной э. д. с, а также вследствие увеличения максимального напряжения между коллекторными пластинами в результате ослабления основного поля и усиления при этом искажающего влияния поперечной реакции якоря.
Для увеличения диапазона регулирования п посредством ослабления поля в машинах малой и средней мощности с волновой обмоткой якоря иногда применяют раздельное питание катушек возбуждения отдельных полюсов. При этом в одной группе полюсов сохраняют iB = const и большой поток со значительным насыщением участков магнитной цепи, а в другой группе полюсов tB и поток уменьшают. Искажающее влияние поперечной реакции якоря под первой группой полюсов в этом случае будет проявляться значительно слабее. Так как в волновой обмотке напряжение между соседними коллекторными пластинами складывается из э. д. с. р секций, расположенных под всеми полюсами, то в результате такого регулирования потока полюсов распределение напряжения между пластинами будет более равномерным.
2. Другой способ регулирования скорости заключается во включении последовательно в цепь якоря реостата или регулируемого сопротивления Rpa,

12. Способы регулирования частоты вращения ДПТ.
т. е. в реостате будет теряться 47,5% приложенного напряжения и столько же мощности, подводимой к цепи якоря. По этой причине
данный способ применяется в основном для двигателей небольшой мощности, а для более мощных двигателей используется редко и только кратковременно (пуско-наладочные режимы и т. д.).
3. Регулирование скорости осуществляется также путем регулирования напряжения цепи якоря. Так как работа двигателя при U > UH недопустима, то данный способ, согласно выражениям (10-7) и (10-9), дает возможность регулировать скорость также вниз от номинальной. К. п. д. двигателя при этом остается высоким, так как никаких добавочных, источников потерь в схему двигателя не вносится.
Однако в этом случае необходим отдельный источник тока с регулируемым напряжением, что удорожает установку.
Отметим, что регулирование скорости путем изменения 1а невозможно, хотя такая возможность на первый взгляд вытекает' из равенства .(10-7). Дело в том, что, согласно равенству (10-3), двигатель при каждой скорости вращения должен развивать определенный момент М, равный моменту сопротивления приводимого механизма М„ при данном значении п. Но при этом в соответствии с выражением (10-8) при данном значении Ф6 величина 1а в двигателе будет при каждом значении М тоже вполне определенной.
Различные способы регулирования п более конкретно, применительно к двигателям с различными способами возбуждения; рассматриваются в последующих параграфах.