

2. Моделирование исполнительных устройств.
Исполнительные устройства по типу двигателя делятся на:
пневматические,
гидравлические,
электромеханические.
Наиболее широко применение в АСУТП получили электромеханические исполнительные устройства. В качестве примера рассмотрим работу клапана, регулирующего расход вещества, подводимого к нему (рис.1.5.3)
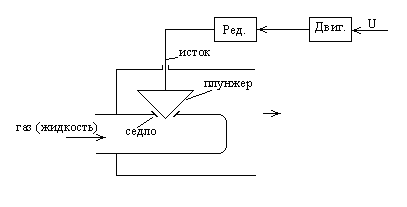
Рис.1.5.3 электромеханический регулирующий клапан
Клапан состоит из седла, плунжера, штока. Управляющий сигнал U запускает двигатель, вращение ротора которого с помощью редуктора преобразуется в линейное возвратно–поступательное движение штока клапана, в результате чего изменяются геометрические размеры зазора между плунжером и седлом клапана. Зависимость между пропускной способностью клапана и величиной перемещения штока при постоянном давлении представлена на рис.1.5.4
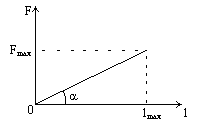
Рис.1.5.4 градуировочная характеристика клапана
Угол наклона a градуировочной характеристики зависит от давления на входе клапана, lmax – длина рабочего хода клапана
![]()
Обычно задается разгонная характеристика клапана (рис.1.5.5)
![]()
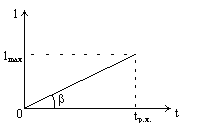
Рис.1.5.5 разгонная характеристика клапана
Угол наклона разгонной характеристики зависит от:
давления на входе клапана,
движения плунжера на закрытие (открытие) клапана (явление гистерезиса).
Применяемые на практике механизмы перемещения регулирующих клапанов являются трехпозиционными. Их структурная схема представлена на рис.1.5.6.

Рис.1.5.6 структурная схема регулирующего клапана
Входной сигнал U поступает с выхода регулятора и преобразуется сигнум – блоком

Сигнум – блок является имитатором сигналов "Больше" (клапан открывается, sign U = 1), "Меньше" (клапан закрывается, sign U = -1) и "СТОП" (клапан остается в текущем положении, sign U = 0).
Сумматор работает по схеме реверсивного счетчика с периодом дискретизации Т и формирует на выходе значение:
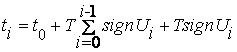
где t – начальное значение счетчика, i – номер шага дискретизации
Блок – Kl является усилительным звеном, на выходе которого формируется сигнал, соответствующий длине хода штока клапана на i – ом шаге и характеризующий текущее положение клапана:
![]()
Блок Кi также является усилительным звеном, на выходе которого формируется сиунал, соответствующий пропускной способности клапана на i – ом шаге:
![]()
3. Законы регулирования.
Регулирование переменной (уровень, давление, расход, температура и т.д.) осуществляется с помощью регулятора, структурная схема которого представлена на рис.1.5.7.
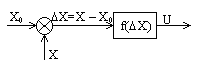
Рис.1.5.7 структурная схема регулятора
Сигнал с датчика Х сравнивается с
уставкой Х0, значение которой
задается оператором или вырабатывается
автоматически в соответствии с некоторой
программой (программное управление). В
дальнейшем будем рассматривать работу
регулятора в режиме автоматической
стабилизации, когда выполняется условие
X0(t) = const. Отклонение
![]() поступает
на вход блока, который формирует
управление U в соответствии с законом
регулирования:
поступает
на вход блока, который формирует
управление U в соответствии с законом
регулирования:
![]()
На рис.1.5.8 показана работа П – регулятора
(пропорциональный регулятор),
стабилизирующего величину уровня Х
жидкости при заданной установке Х0,
по закону
![]() ,
где К – настройка регулятора.
,
где К – настройка регулятора.
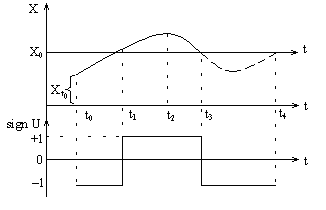
Рис.1.5.8 работа П-регулятора
Предположим, что в момент t0 значение
уровня было Х(t0) < X0.
Тогда отклонение
![]() sign
U = -1, что соответствует сигналу
"меньше", регулирующий клапан будет
закрываться, а уровень Х будет возрастать.
Наконец, в момент t, значение отклонения
sign
U = -1, что соответствует сигналу
"меньше", регулирующий клапан будет
закрываться, а уровень Х будет возрастать.
Наконец, в момент t, значение отклонения
![]() ,
sign U = 0, что будет означать, что
клапан останется в текущем положении.
С момента t > t1 отклонение
,
sign U = 0, что будет означать, что
клапан останется в текущем положении.
С момента t > t1 отклонение
![]() начнет
увеличивать в положительном направлении,
т.к. уровень Х будет продолжать
увеличиваться, а пропускная способность
канала останется той же самой, что и в
момент t1. Тогда sign Uit>t1 = 1,
что соответствует сигналу "больше"
и клапан начнет открываться, способствуя
уменьшению уровня Х. В момент t2
приток жидкости будет равен пропускной
способности клапана, но отклонение
начнет
увеличивать в положительном направлении,
т.к. уровень Х будет продолжать
увеличиваться, а пропускная способность
канала останется той же самой, что и в
момент t1. Тогда sign Uit>t1 = 1,
что соответствует сигналу "больше"
и клапан начнет открываться, способствуя
уменьшению уровня Х. В момент t2
приток жидкости будет равен пропускной
способности клапана, но отклонение
![]() ,
sign U = 1, и клапан будет продолжать
увеличивать свою пропускную способность
до момента t3. Превышение уровня
Х над уставкой Х0 в интервале t1-t3
называется перерегулированием
,
sign U = 1, и клапан будет продолжать
увеличивать свою пропускную способность
до момента t3. Превышение уровня
Х над уставкой Х0 в интервале t1-t3
называется перерегулированием
![]() .
Величина перерегулирования определяет
качество регулирования и зависит от
типа и настройки регулятора. В интервале
t3-t4 аналогично положительной
"волне" формируется отрицательная
"волна" перерегулирования.
.
Величина перерегулирования определяет
качество регулирования и зависит от
типа и настройки регулятора. В интервале
t3-t4 аналогично положительной
"волне" формируется отрицательная
"волна" перерегулирования.
1.6 Комплекс технических средств АСУТП.
Состав комплекса технических средств АСУТП.
Устройство сопряжения с объектом (УСО).