

3. Супервизорное управление.
В этой схеме АСУТП используется в замкнутом контуре, т.е. установки регуляторам задаются непосредственно системой (рис.1.2.3).
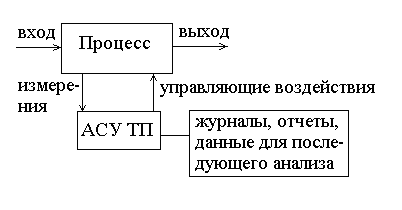
Рис.1.2.3 схема супервизорного управления
Задача режима супервизорного управления – поддержание ТП вблизи оптимальной рабочей точки путем оперативного воздействия на него. В этом одно из главных преимуществ данного режима. Работа входной части системы, и вычисление управляющих воздействий мало отличается от работы системы управления в режиме советчика. Однако, после вычисленных значений уставок, последние преобразовываются в величины, которые можно использовать для изменения настроек регуляторов.
Если регуляторы воспринимают напряжения, то величины вырабатываемые ЭВМ, должны быть преобразованы в двоичные коды, которые с помощью цифро-аналогового преобразователя превращаются в напряжения соответствующего уровня и знака. Оптимизация ТП в этом режиме выполняется периодически, напр. один раз в день. Должны быть введены новые коэффициенты в уравнения контуров управления. Это осуществляется оператором через клавиатуру, или считывая результаты новых расчетов, выполненные на ЭВМ более высокого уровня. После этого АСУТП способна работать без вмешательства извне в течение длительного времени. Примеры АСУТП в супервизорном режиме.
Управление автоматизированной транспортно-складской системы. ЭВМ выдает адреса стеллажных ячеек, а система локальной автоматики кранов-штабелеров отрабатывает перемещение их в соответствии с этими адресами.
Управление плавильными печами. ЭВМ вырабатывает значения уставок электрического режима, а локальная автоматика управляет переключателями трансформатора по командам ЭВМ.
Станки с ЧПУ управление через интерполятор.
4. Неспосредственное цифровое управление.
В режиме непосредственного цифрового управления (НЦУ) сигналы, используемые для приведения в действие управляющих органов, поступают непосредственно из АСУТП, и регуляторы вообще исключаются из системы. В сущности, регуляторы – это малые аналоговые вычислители, которые решают одно-единственное уравнение, напр. такого вида:
(положение клапана) =
![]() (1.2.1)
(1.2.1)
где k0, k1, k2, k3 – параметры настройки, благодаря которым регулятор можно настроить на работу во многих различных процессах;
![]() =
(измеряемая переменная) – (уставка).
=
(измеряемая переменная) – (уставка).
Если
![]() ,
то для выведения процесса на заданную
контрольную точку требуется перемещение
управляющего органа.
,
то для выведения процесса на заданную
контрольную точку требуется перемещение
управляющего органа.
Если регулятор использует для своей работы 2 первых члена уравнения (1.2.1), то он называется "пропорциональным", сокращенно П. Если используется 3 первых члена, то регулятор называется "пропорционально-интегральным" (ПИ), и если используется все члены уравнения (1.2.1), то регулятор называется "пропорционально-интегрально-дифференциальным" (ПИД).
Концепция НЦУ позволяет заменить регуляторы с задаваемой уставкой, АСУТП расчитывает реальные воздействия, и передает соответствующие сигналы непосредственно на управляющие органы. Схема НЦУ показана на рис.1.2.4.
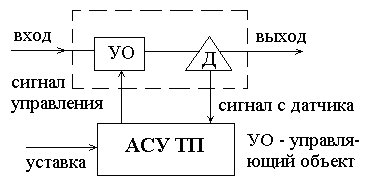
Рис.1.2.4 схема непосредственного цифрового управления (НЦУ)
Уставки вводятся в АСУ оператором или ЭВМ, выполняющей расчеты по оптимизации процесса. При наличии системы НЦУ оператор должен иметь возможность изменять уставки, контролировать некоторые избранные переменные, варировать диапозоны допустимого изменения измеряемых переменных, изменять параметры настройки и вообще должен иметь доступ к управляющей программе.
Одно из главных преумуществ режима НЦУ заключается в возможности изменения алгоритмов управления для контуров простым внесением изменений в хранимую программу.
Наиболее очивидный недостаток НЦУ проявляется при отказе ЭВМ.
1.3 Подготовка исходной информации в АСУТП
Измерительные преобразователи.
Погрешности измерительных преобразователей.