

4. Центр масс механической системы и его определение.
На движение механических систем влияет не только масса всей системы, но и то, как масса распределена по объёму, занимаемому системой в пространстве. Одной из характеристик распределения массы является центр масс.
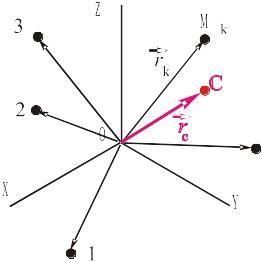
Центром масс механической системы называется такая точка С, радиус-вектор которой определяется по формуле
 1717\* MERGEFORMAT ()
1717\* MERGEFORMAT ()
Сумма масс всех точек системы
 1818\* MERGEFORMAT ()
1818\* MERGEFORMAT ()
называется массой системы. Поэтому равенство (17) можно записать так:
 1919\* MERGEFORMAT ()
1919\* MERGEFORMAT ()
Проектируя выражения (17) или (19) на выбранные оси координат, получим формулы для определения координат центра масс:
 2020\* MERGEFORMAT ()
2020\* MERGEFORMAT ()
Если
точки механической системы движутся,
т.е.
 ,
то из (17), или (19), следует, что и , вообще
говоря,
,
то из (17), или (19), следует, что и , вообще
говоря,
 .
Тогда, дифференцируя по времени (19),
можем найти скорость центра масс
.
Тогда, дифференцируя по времени (19),
можем найти скорость центра масс
 2121\* MERGEFORMAT ()
2121\* MERGEFORMAT ()
и его ускорение
 2222\* MERGEFORMAT ()
2222\* MERGEFORMAT ()
С помощью (20) можно найти проекции скорости и ускорения центра масс на оси координат.
Для произвольных механических систем положение центра масс находится по формулам(17), или (19) (координаты – по формулам (20)). Для твёрдых тел в этих равенствах вместо сумм должны стоять интегралы, но можно непосредственно установить положение центра масс тела. Домножим обе части (19) на ускорение свободного падения:

и
вспомним, что
 ,
тогда
,
тогда

а эта формула для определения центра тяжести твердого тела. Следовательно, центр масс тела всегда совпадает с центром тяжести этого тела!
5. Теорема о движении центра масс и закон сохранения движения центра масс.
Запишем дифференциальные уравнения движения механической системы (13):

Почленно сложим все уравнения:

Имеем:

главный вектор внешних сил;

главный вектор внутренних сил, равный нулю;

где
 масса вей системы. В результате получим:
масса вей системы. В результате получим:
 2323\* MERGEFORMAT ()
2323\* MERGEFORMAT ()
Если теперь сравнить равенство (23) с дифференциальным уравнением движения материальной точки

то получим
теорему о движении центра масс механической системы
Центр масс механической системы движется как материальная точка, в которой сосредоточена вся масса системы и к которой приложены все внешние силы.
Уравнение (23) называют дифференциальным уравнением движения центра масс. В проекциях на оси координат Oxyz (23) запишется
 2424\* MERGEFORMAT ()
2424\* MERGEFORMAT ()
Закон сохранения движения центра масс.
Пусть
внешние силы, действующие на систему
таковы, что (силы приводятся к паре сил, или
уравновешены). В этом случае из (23),
учитывая, что
(силы приводятся к паре сил, или
уравновешены). В этом случае из (23),
учитывая, что
 ,
будет следовать
,
будет следовать
 2525\* MERGEFORMAT ()
2525\* MERGEFORMAT ()
т.е.
центр масс в этом случае движется
прямолинейно и равномерно (если
 ),
или находится в покое (если
),
или находится в покое (если
 ).
Это и есть закон
сохранения движения центра масс системы:
).
Это и есть закон
сохранения движения центра масс системы:
если главный вектор внешних сил равен нулю, то центр масс системы движется равномерно и прямолинейно, или находится в покое.
На практике закон сохранения в виде (25) выполняется не слишком часто. Чаще возникает такая ситуация:

Тогда из (24) получим ( )
 2626\* MERGEFORMAT ()
2626\* MERGEFORMAT ()
что будет частным случаем закона сохранения движения центра масс:
если
проекция главного вектора внешних сил
на какую-либо ось равна нулю, то центр
масс системы относительно этой оси
движется равномерно (если
 ),
или находится в покое (если
),
или находится в покое (если
 ).
).
Пусть
 .
Следовательно, из закона сохранения
можем получить
.
Следовательно, из закона сохранения
можем получить

т.е. центр масс системы неподвижен.
Пусть
в момент t
положения точек системы определяются
радиус-векторами
,
а в момент
 радиус-векторами
радиус-векторами
 .
.
По формуле (19) имеем:
в
момент


а
в момент


Вычитая из второго равенства первое получим

но
 это перемещения точек системы за
промежуток
это перемещения точек системы за
промежуток
 .
Поэтому получаем такой результат:
.
Поэтому получаем такой результат:
 2727\* MERGEFORMAT ()
2727\* MERGEFORMAT ()
если главный вектор внешних сил равен нулю и центр масс системы неподвижен, то сумма произведений масс точек системы на их перемещения равна нулю.
Для частного случая (26) будет

если
 .
.