

4. Принцип возможных перемещений.
Принцип возможных перемещений является необходимым и достаточным условием равновесия механической системы. Его можно использовать вместо векторных условий равновесия (главный вектор и главный момент системы сил равны нулю). Принцип возможных перемещений при изучении равновесия системы тел (составных конструкций) позволяет избежать определения многочисленных внутренних сил и более рационально определить требуемые внешние силы. Принцип возможных перемещений в современном виде был сформулирован Лагранжем, поэтому его иногда называют принципом Лагранжа.
Для равновесия механической системы с идеальными удерживающими связями необходимо и достаточно, чтобы сумма виртуальных работ сил, действующих на систему, на любых возможных перемещениях была равна нулю.
(Без доказательства)
Символически принцип возможных перемещений может быть записан в виде
 3232\* MERGEFORMAT ()
3232\* MERGEFORMAT ()
Рассмотрим пример применения принципа возможных перемещений к решению задач на равновесие.
Пример. Подъёмное устройство состоит из ведущего колеса 1 радиуса R1, взаимодействующего с ним ведомого колеса радиуса R2. На ворот ведомого колеса радиуса r намотана невесомая и нерастяжимая верёвка, к которой привязан поднимаемый груз весом P.
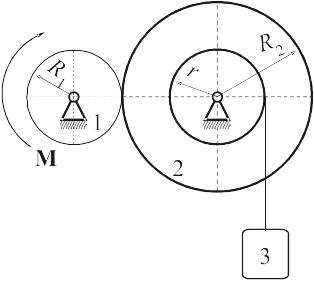
Определить момент М пары сил, которую надо приложить к ведущему колесу, для равномерного подъёма груза. Трением в опорах пренебречь. Скольжение между колесами отсутствует.
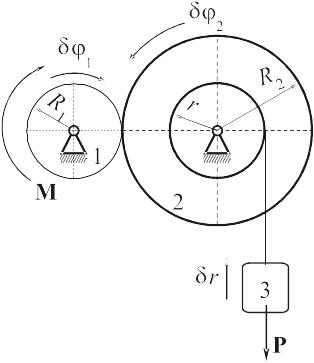
РЕШЕНИЕ. Связи являются идеальными, поэтому их реакции не показываем. Изображаем силу тяжести груза и пару сил с искомым моментом. Сообщаем точкам системы возможные перемещения:
поворачиваем
колесо 1 на бесконечно малый угол
 по направлению пары сил;
по направлению пары сил;
колесо
2 повернётся при этом на бесконечно
малый угол
 ;
;
груз 3 сместится вверх на бесконечно малую величину .
Так как система находится в равновесии, то (принцип возможных перемещений!) сумма виртуальных работ всех сил на любых возможных перемещениях равна нулю:
 3333\* MERGEFORMAT ()
3333\* MERGEFORMAT ()
На систему наложены связи:

т.к. колеса не скользят относительно друг друга;

т.к. верёвка не растяжимая и не скользит по вороту.
Число
координат, определяющих положение
системы равно трём:
 .
Число наложенных связей равно двум.
Следовательно, число степеней свободы
согласно (27) равно
.
Число наложенных связей равно двум.
Следовательно, число степеней свободы
согласно (27) равно
 ,
а поэтому у системы только одно независимое
возможное перемещение.
,
а поэтому у системы только одно независимое
возможное перемещение.
Из первой связи получаем

Вторая связь даёт

Подставляя это выражение в сумму виртуальных работ (33), получим

Так
как
 ,
то
,
то
