

14 БИлет
1. Мінімізація енергоспоживання в системах на основі мк
Малий рівень енергоспоживання є найчастіше визначальним фактором при виборі способу реалізації цифрової керуючої системи. Сучасні МК надають користувачу великі можливості в плані економії енергоспоживання і мають, як правило, наступні основні режими роботи:
активний режим (Run mode) - основний режим роботи МК. У цьому режимі МК виконує робочу програму, і всі його ресурси доступні. Споживана потужність має максимальне значення PRUN. Більшість сучасних МК виконані за КМОН-технологією, тому потужність споживання в активному режимі сильно залежить від тактової частоти;
режим очікування (Wait mode, Idle mode або Halt mode). У цьому режимі припиняє роботу центральний процесор, але продовжують функціонувати периферійні модулі, які контролюють стан об'єкта управління. При необхідності сигнали від периферійних модулів переводять МК в активний режим, і робоча програма формує необхідні керуючі сигнали. Переведення МК із режиму очікування в робочий режим здійснюється за перериваннями від зовнішніх джерел або периферійних модулів, або при ініціалізації МК. У режимі очікування потужність споживання МК PWAIT знижується в порівнянні з активним режимом у 5...10 раз;
режим зупинки (Stop mode, Sleep mode або Power Down mode). У цьому режимі припиняє роботу як центральний процесор, так і більшість периферійних модулів. Перехід МК зі стану зупинки в робочий режим можливий, як правило, тільки за перериваннями від зовнішніх джерел або після подачі сигналу ініціалізації. У режимі зупинки потужність споживання МК PSTOP знижується в порівнянні з активним режимом приблизно на три порядки і складає одиниці мікроват.
Два останніх режими називають режимами зниженого енергоспоживання. Мінімізація енергоспоживання системи на МК досягається за рахунок оптимізації потужності споживання МК в активному режимі, а також використання режимів зниженого енергоспоживання. При цьому необхідно мати на увазі, що режими очікування і зупинки істотно відрізняються часом переходу з режиму зниженого енергоспоживання в активний режим. Вихід з режиму очікування переважно відбувається протягом 3...5 періодів синхронізації МК, у той час як затримка виходу з режиму зупинки складає кілька тисяч періодів синхронізації. Крім зниження динаміки роботи системи значний час переходу в активний режим є причиною додаткової витрати енергії.
2 Етапи проектування мпс на базі мк
3 Робота таймерів лічильників Процесори подій
Таймери і процесори подій
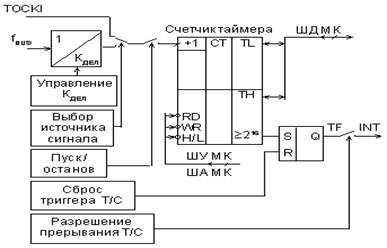
Більшість задач управління, які реалізуються за допомогою МК, вимагає виконання їх в реальному часі. Покладати функції формування управління в реальному масштабі часу тільки на центральний процесор неефективно, оскільки це займає ресурси, необхідні для розрахункових процедур. Тому в більшості сучасних МК використовується апаратна підтримка роботи в реальному часі з використанням таймера (таймерів). Модулі таймерів служать для прийому інформації про час настання тих або інших подій від зовнішніх датчиків подій, а також для формування управляючих дій в часі. Модуль таймера 8-розрядного МК є 8-м або 16-розрядний лічильник з схемою управління. Схемотехнікою МК звичайно передбачається можливість використовування таймера в режимі лічильника зовнішніх подій, тому його часто називають таймером/лічильником. Структура типового 16-розрядного таймера/лічильника у складі МК приведена на мал. 4.5.
 Мал.
4.5. Структура модуля таймера/лічильника.
Мал.
4.5. Структура модуля таймера/лічильника.
В пам'яті МК 16-розрядний лічильник відображається двома регістрами: TH - старший байт лічильника, TL - молодший байт. Регістри доступні для читання і для запису. Напрям рахунку - тільки прямий, тобто під час надходженя вхідних імпульсів вміст лічильника збільшується. Залежно від настройки лічильник може використовувати одне з джерел вхідних сигналів:
імпульсну послідовність з виходу керованого дільника частоти fBUS;
сигнали зовнішніх подій, що поступають на вхід TOCKI контроллера.
В першому випадку говорять, що лічильник працює в режимі таймера, в другому - в режимі лічильника подій. Пуск і зупинка таймера можуть здійснюватися тільки під управлінням програми.
Основними недоліками «класичного» таймера/лічильника є:
втрати часу на виконання команд пуску і зупинки таймера, що приводять до появи помилки при вимірюванні тимчасових інтервалів і обмежуючі мінімальну тривалість вимірюваних інтервалів часу одиницями мс;
складнощі при формуванні тимчасових інтервалів (міток часу), відмінних від періоду повного коефіцієнта рахунку, рівного (Kділ/fBUS)*216;
неможливість одночасного обслуговування (вимірювання або формування імпульсного сигналу) відразу декількох каналів.
Перші два недоліки були усунені у вдосконаленому модулі таймера/лічильника, що використовується в МК сімейства MCS-51 (Intel).
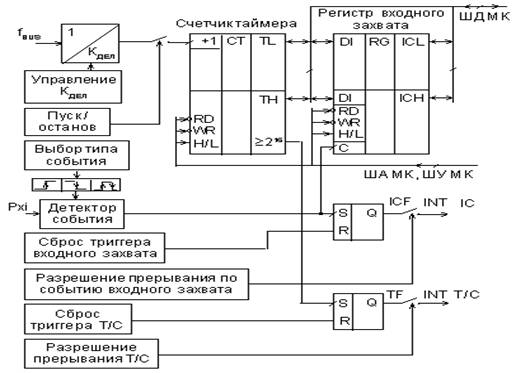
Принцип дії каналу вхідного захоплення таймера/лічильника ілюструє мал. 4.6. Схема детектора події «спостерігає» за рівнем напруги на одному з входів МК. Частіше всього це одна з ліній порту вводу/виводу. При зміні рівня логічного сигналу з «0» на «1» і навпаки виробляється строб запису, і поточний стан лічильника таймера записується в 16-розрядний регістр вхідного захоплення. Описану дію в мікропроцесорній техніці називають подією захоплення.
 Мал.
4.6. Структурна схема каналу вхідного
захоплення таймера.
Мал.
4.6. Структурна схема каналу вхідного
захоплення таймера.
Передбачена можливість вибору типу сигналу на вході, і це сприймається як подія:
позитивний (передній) фронт сигналу;
негативний (задній) фронт сигналу;
будь-яка зміна логічного рівня сигналу.
Вибір типу події захоплення встановлюється в процесі ініціалізації таймера і може неодноразово змінюватися в ході виконання програми. Кожна подія захоплення приводить до установки в «1» трігера вхідного захоплення і появі на його виході прапора (ознаки) вхідного захоплення ICF. Стан трігера вхідного захоплення може бути лічений програмно, а якщо переривання по події захоплення дозволені - формується запит на переривання INT IC. Використовування режиму вхідного захоплення дозволяє виключити помилки вимірювання вхідного інтервалу часу, зв'язані з часом переходу до підпрограми обробки переривання, оскільки копіювання поточного стану лічильника здійснюється апаратними, а не програмними засобами. Проте час переходу на підпрограму обробки переривання накладає обмеження на тривалість вимірюваного інтервалу часу, оскільки передбачається, що друга подія захоплення відбудеться пізніше, ніж код першої події буде прочитаний МК. Апаратні засоби вдосконаленого таймера дозволяють вирішити багато задач управління в реальному часі. Проте у міру зростання складності алгоритмів управління виразно виявляються обмеження модулів вдосконаленого таймера, а саме:
недостатнє число каналів захоплення і порівняння, що належить одному лічильнику тимчасової бази. Це не дозволяє сформувати синхронізовані між собою багатоканальні імпульсні послідовності;
однозначно певна конфігурація каналу (або захоплення або порівняння) часто не задовольняє потребам вирішуваної задачі;
формування сигналів по методу широтно-імпульсної модуляції (ШІМ) вимагає програмної підтримки, що знижує максимально досяжну частоту вихідного сигналу.
наступним етапом розвитку модулів підсистеми реального часу МК стали модулі процесорів подій. Вперше модулі процесорів подій були використані компанією Intel в МК сімейства 8xC51Fx. Цей модуль одержав назву програмованого рахункового масиву (Programmable Counter Array - PCA). РСА забезпечує більш широкі можливості роботи в реальному масштабі часу і у меншій мірі витрачає ресурси центрального процесора, ніж стандартний і вдосконалений таймери/лічильники. До переваг РСА також можна віднести більш просте програмування і більш високу точність. Наприклад, РСА може забезпечити кращу часову роздільну здатність, ніж таймери 0, 1 і 2 МК сімейства MCS-51, оскільки лічильник РСА здатний працювати з тактовою частотою, втричі більшою, ніж у цих таймерів. РСА також може вирішувати багато задач, виконання яких з використанням таймерів вимагає додаткових апаратних витрат (наприклад, визначення фазового зсуву між імпульсами або генерація ШІМ-сигналу).