

3.2 Метод Жуковского
Порядок выполнения метода Жуковского:
Поворачиваем план скоростей механизма (Рисунок 3) или силы на 90°;
На этом плане определяем точки приложения внешних сил и сил инерции;
В указанные точки прикладываем данные силы;
Рассматриваем план скоростей как «жесткий рычаг», который может поворачиваться вокруг полюса P, составляем уравнение равновесия «рычага». И находим движущую силу.
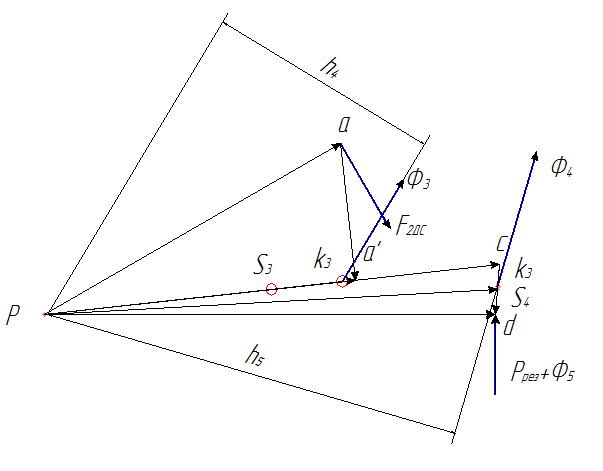
Рисунок 16 – Рычаг Жуковского
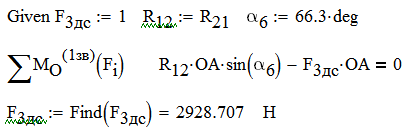
Определяем движущую силу методом рычага Жуковского:

Результаты:
Графоаналитический метод:
Метод Жуковского:
![]()
Расхождение результатов:

3.3 Аналитический метод
Определяем реакции группы Ассура второго класса второго вида(Рисунок 12):

Определяем реакции группы Ассура второго класса третьего вида(Рисунок 13):

Определяем движущую силу кривошипа кривошипа(Рисунок 14):
Результаты:
Графоаналитический метод:
Метод Жуковского:
Аналитический метод:
![]()
Расхождение результатов:

4 Динамический анализ механизма и расчет маховика
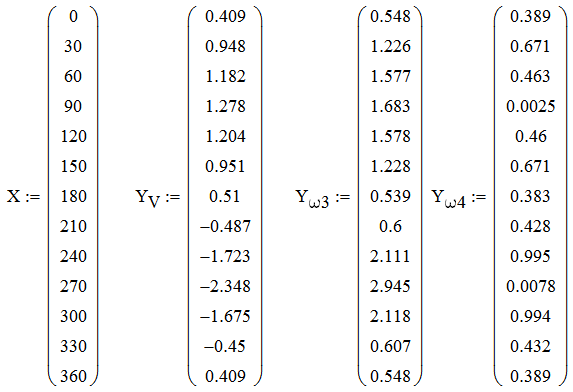
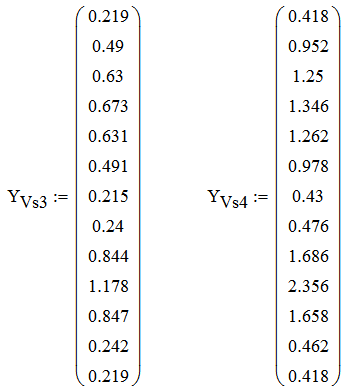
Таблица 2 – Значение абсолютных и угловых скоростей механизма
Положение механизма |
Скорость |
||||
VD, м/c |
VS3, м/c |
VS4, м/c |
|
|
|
0 |
0.409 |
0.219 |
0.418 |
0.548 |
0.389 |
1 |
0.948 |
0.49 |
0.952 |
1.226 |
0.671 |
2 |
1.182 |
0.63 |
1.25 |
1.577 |
0.463 |
3 |
1.278 |
0.673 |
1.346 |
1.683 |
0.0025 |
4 |
1.204 |
0.631 |
1.262 |
1.578 |
0.46 |
5 |
0.951 |
0.491 |
0.978 |
1.228 |
0.671 |
6 |
0.51 |
0.215 |
0.43 |
0.539 |
0.383 |
7 |
-0.487 |
0.24 |
0.476 |
0.6 |
0.428 |
8 |
-1.723 |
0.844 |
1.686 |
2.111 |
0.995 |
9 |
-2.348 |
1.178 |
2.356 |
2.945 |
0.0078 |
10 |
-1.675 |
0.847 |
1.658 |
2.118 |
0.994 |
11 |
-0.45 |
0.242 |
0.462 |
0.607 |
0.432 |
Построим диаграммы движения абсолютных и угловых скоростей:
![]()

Рисунок 17 – Диаграмма скорости выходного звена
![]()
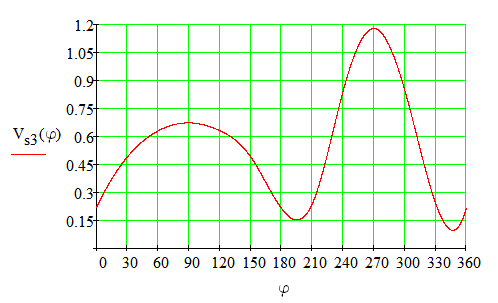
Рисунок 18 – Диаграмма скорости центра масс третьего звена
![]()
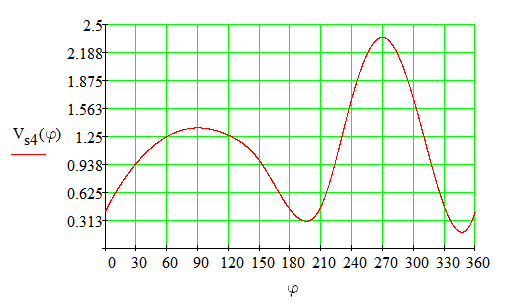
Рисунок 19 – Диаграмма скорости центра масс четвертого звена
![]()

Рисунок 20 – Диаграмма угловой скорости третьего звена
![]()

Рисунок 21 – Диаграмма угловой скорости четвертого звена
Определяем приведённый момент сил полезного сопротивления к валу кривошипа:
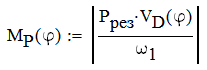

Рисунок 22 – Диаграмма приведенного момента к валу кривошипа
Определяем работу сил сопротивления и движущих сил:


Рисунок 23 – Диаграмма работ сил сопротивления и движущих сил
Определяем момент движущих сил:

Определяем мощность двигателя:
![]()
Определяем избыточную энергию:
![]()

Рисунок 24 – Диаграмма избыточных энергий
Определяем приведённый момент инерции к валу кривошипа:
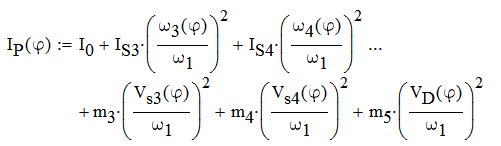
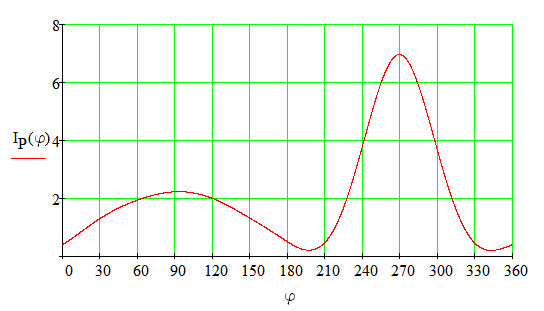
Рисунок 25 – Диаграмма приведённого момента инерции к валу кривошипа
Построим график угловой скорости механизма без учета маховика:


Рисунок 26 – Диаграмма угловой скорости механизма без учета маховика

В нашем случае должно выполняться условие δ меньше или равно 0.04. Данное условие не выполняется, следовательно, надо увеличить приведенный момент инерции механизма.
Определяем момент инерции маховика:


Рисунок 27 – Диаграмма Виттенбауэра

Построим график угловой скорости механизма c учетом маховика:

Рисунок 28 – Диаграмма угловой скорости механизма с учетом маховика

Определяем габариты маховика:



Определяем окружную скорость точек наружной поверхности обода маховика:
При скорости меньше 40 м/c рекомендуемый материал для маховика чугун.
Определяем число спиц:

Определяем габариты спиц:
Спицы принимают эллиптического сечения, где с и h малая и большая ось эллипса.


Размеры отверстия и ступицы определяем конструктивно:
По ГОСТ 23360-78 определяем размеры шпоночного паза под призматическую шпонку:
![]()
Эскиз маховика смотри в приложении В.
ПРИЛОЖЕНИЕ А АНАЛИЗ КИНЕМАТИЧЕСКИЙ
ПРИЛОЖЕНИЕ Б АНАЛИЗ СИЛОВОЙ
ПРИЛОЖЕНИЕ В АНАЛИЗ ДИНАМИЧЕСКИЙ
ЛИТЕРАТУРА
1. Артоболевский И. И. Теория механизмов и машин: Учебник для вузов. М., 1988г.
2. Лачуга Ю.Ф. ,Чернов М.Ю. Теория механизмов и машин. Кинематика , динамика и расчет. М.: Колос, 2008. 304 с.
СМ.ТММ.03.07.000 ПЗ

