

Особливості методу Лагранжа-Ейлера для розв’язання оберненої задачі динаміки
Цей метод ґрунтується на рівнянні Лагранжа наступного вигляду:
![]() (3.4)
(3.4)
де L
– функція Лагранжа (L
= T
– V);
T
– кінетична енергія системи; V
– потенціальна енергія; qi
– узагальнені координати
![]() ;
;
![]() - узагальнені сили та моменти.
- узагальнені сили та моменти.
Рух кожної ланки
маніпулятора описується в системі
координат з шістьма вимірами
![]() ,
де
,
де
![]() - вектор початку координат кожної ланки,
та ,
,
- кути Ейлера. Вони пов’язують n-у
cсистему
координат досліджуваної ланки з базовою
- вектор початку координат кожної ланки,
та ,
,
- кути Ейлера. Вони пов’язують n-у
cсистему
координат досліджуваної ланки з базовою
![]() .
Отже, узагальнені координати будуть
такими:
.
Отже, узагальнені координати будуть
такими:
![]() or
or
![]() ,
,
де t – час.
Необхідно відмітити, що однозначне розв’язання оберненої задачі динаміки можливе тільки для маніпулятора з 6 степенями свободи, тобто N = 6.
Особливості використання розподілення мас та тензора інерції
Якщо розглядається обертання, то необхідно знати розподілення маси по всіх осях обертання. Тоді використовується тензор інерції:
 ,
,
де для робота з дискретним розподіленням маси справедливо наступне:
![]() (3.5)
(3.5)
![]() (3.6)
(3.6)
а для робота з неперервним розподіленням маси справедливо таке:

де
![]() - густина
ланки.
- густина
ланки.
Швидкість ланки
Нехай вектор
![]() визначає положення точки P
відносно базової системи координат
(x0,
y0,
z0).
Вектор
визначає положення точки P
відносно базової системи координат
(x0,
y0,
z0).
Вектор
![]() буде визначати положення тієї ж точки,
але вже в i-й
системі
координат
(рис. 3.6). Таким чином, швидкість точки P
в базовій системі координат може бути
визначена як
буде визначати положення тієї ж точки,
але вже в i-й
системі
координат
(рис. 3.6). Таким чином, швидкість точки P
в базовій системі координат може бути
визначена як
![]() .
.
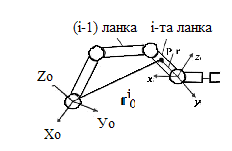
Рис. 3.6. Геометрія двохмірного маніпулятора
Тепер час згадати, що вектор може бути записаний через перетворення Денавіта-Хартенберга наступним чином:
![]()
Таким чином, можна отримати:
![]() ,
,
де qi – незалежні змінні i. Останній вираз може бути переписаний як
![]() .
(3.7)
.
(3.7)
Тепер можна показати, що
![]() ,
(3.8)
,
(3.8)
де Qi
– постійні матриці. Наприклад, для
![]() будемо мати
будемо мати


Отже, для обертальних
зчленувань матриця Qi
буде
 та для призматичних зчленувань матриця
Qi
буде зовсім простою
та для призматичних зчленувань матриця
Qi
буде зовсім простою
 .
.
Тепер визначимо
величину Dij
як
![]() .
Нарешті, можна легко записати похідні
більш високих порядків
.
Нарешті, можна легко записати похідні
більш високих порядків
 (3.9)
(3.9)
Кінетична енергія маніпулятора
Кінетична енергія dT системи з масою dm дорівнює
![]()
де dTi – кінетична енергія i-ої ланки маніпулятора. Вона може бути знайдена з наступного виразу:
![]() (3.10)
(3.10)
де позначення ‘tr’ відповідає оператору сліду матриці, тобто, сумі діагональних елементів матриці.
Тепер розглянемо добуток у дужках:
 .
.
Тоді вираз (3.10) можна переписати як:

Про інтегрувавши обидві частини цього виразу, отримаємо:
![]()
Інтегральна складова у дужках є матрицею інерції і-ої ланки відносно початку координат і-ої системи координат:

Виразимо величину Ji через складові тензора інерції I наступним чином:
 (3.11)
(3.11)
де
![]() - координати центра мас і-ої
ланки в і-ій
системі координат. Таким чином, сумарна
кінетична енергія маніпулятора дорівнює
- координати центра мас і-ої
ланки в і-ій
системі координат. Таким чином, сумарна
кінетична енергія маніпулятора дорівнює
![]()
![]() .
.
Потенціальна енергія маніпулятора
Сумарна потенціальна енергія V маніпулятора, яка залежить від ваги робота, також може бути визначена як сума потенціальних енергій всіх ланок:
![]() ,
,
де
![]() - вектор положення центра мас і-ої
ланки в і-ій
системі координат, g
– прискорення сили тяжіння.
- вектор положення центра мас і-ої
ланки в і-ій
системі координат, g
– прискорення сили тяжіння.