

Особливості перетворення Денавіта – Хартенберга при розв’язанні задач кінематики
Перетворення Денавіта – Хартенберга описує системи координат ланок маніпулятора з n степенями свободи. Перехід між системами координат сусідніх ланок здійснюється матрицею однорідних перетворень 4x4.
Перша система координат зв’язана з базою та вважається однорідною [x0 y0 z0 1]T. Її початок координат приймається за нульове зчленування. Перетворення Денавіта – Хартенберга представляє взаємне положення всіх ланок маніпулятора за допомогою чотирьох характеристик: a, , d, (рис. 3.1). Тут di – відстань між ланками, і – кут зчленування, ai – довжина ланки, і – кут скручування ланки. У загальному випадку параметри ai та і є константами та залежать від конструкції маніпулятора.
Отже, можна отримати представлення точки ri, що описана в i-тій системі координат, через ri-1 шляхом таки перетворень:
1) обертання навколо осі Zi-1 на кут i таким чином, щоб осі xi-1 та xi стали паралельними: R(Zi-1, і);
2) перенесення вздовж осі Zi-1 на відстань di таким чином, щоб сумістити осі xi-1 та xi: T(Zi-1, di);
3) перенесення вздовж осі xi на відстань ai таким чином, щоб сумістити початки координат двох систем координат: T(xi, ai);
4) обертання навколо осі xi на кут і таким чином, щоб сумістити початки координат двох систем координат: R(xі, і).
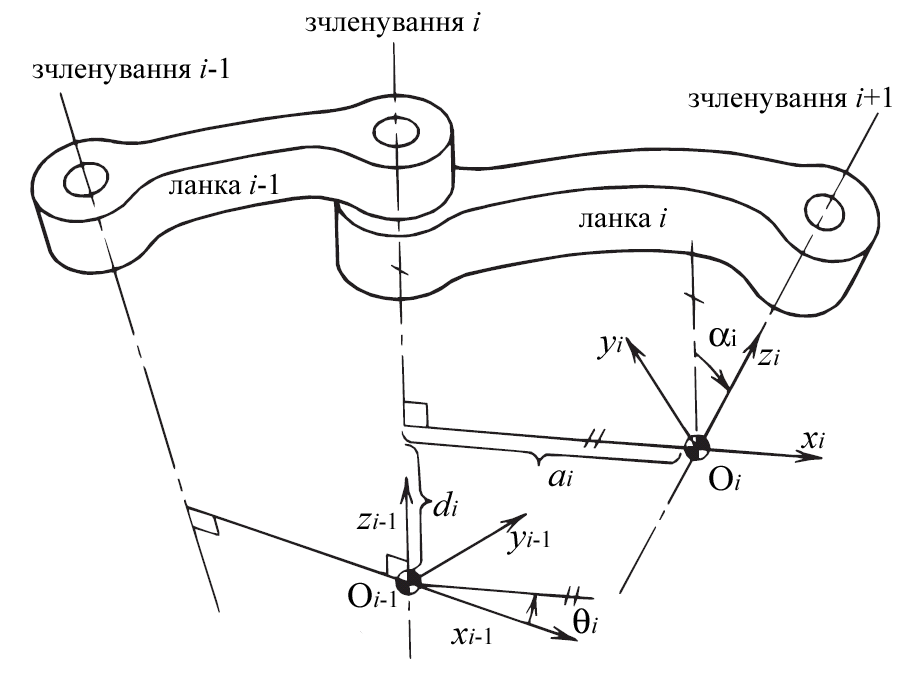
Рис. 3.1. Перетворення Денавіта-Хартенберга
Таким чином, повне перетворення, що зв’язує і-ту ланку з (і–1)-ою або і-те зчленування з (і – 1)-м, має такий вигляд:
![]()

 (3.1)
(3.1)
Потім
можна перейти від (і
– 1 )-ої ланки до і-тої
ланки шляхом виконання наступної
операції: ri-1=Ai-1
ri,
де
![]() - вектори координат точки в і-тій
та (і
– 1)-ій системі координат.
- вектори координат точки в і-тій
та (і
– 1)-ій системі координат.
Алгоритм перетворення Денавіта-Хартенберга
1. Визначте базову систему координат [x0y0z0] таким чином, щоб вісь z0 співпадала з віссю руху першого зчленування.
2. Повторіть те саме для всіх зчленувань. Це значить, що вісь Zi завжди буде паралельна осі поступального руху або обертання (i+1) зчленування.
3. Визначте початок координат i-ої системи координата бо як перетин осей Zi та Zi-1, або як перетин осі Zi зі спільною нормаллю до осей Zi та Zi-1.
4. Визначте вісь xi в кожному i-му зчленуванні як перпендикуляр до осей Zi та Zi-1.
5. Визначте вісь yi таким чином, щоб утворилася правостороння система координат.
6. Знайдіть di як відстань від початку координат (і – 1)-ої системи координат до точки перетину осей Zi-1 та xi.
7. Знайдіть ai як відстань між точкою перетину осі Zi-1 зі спільною нормаллю до осей Zi-1 та Zi та початком координат i-ої системи координат.
8. Знайдіть кут і як кут обертання від осі xi-1 до осі xi .
9. Знайдіть кут і як кут обертання від осі Zi-1 до осі Zi відносно осі xi .
Обернена задача
кінематики
заключається в знаходженні вектора
переміщень зчленувань
![]() ,
якщо задано бажані положення та орієнтація
захоплювача. Положення та орієнтація
захоплювача задаються як правило у
вигляді матриці T
однорідних кінематичних перетворень,
яка описує положення та орієнтацію
системи координат захоплювача 0UVW
відносно базової системи координат
0XYZ
наступним чином:
,
якщо задано бажані положення та орієнтація
захоплювача. Положення та орієнтація
захоплювача задаються як правило у
вигляді матриці T
однорідних кінематичних перетворень,
яка описує положення та орієнтацію
системи координат захоплювача 0UVW
відносно базової системи координат
0XYZ
наступним чином:
 ,
(3.2)
,
(3.2)
що включає матрицю направляючих косинусів та вектор положення початку системи координат [px py pz]T (рис. 3.2, a, б).
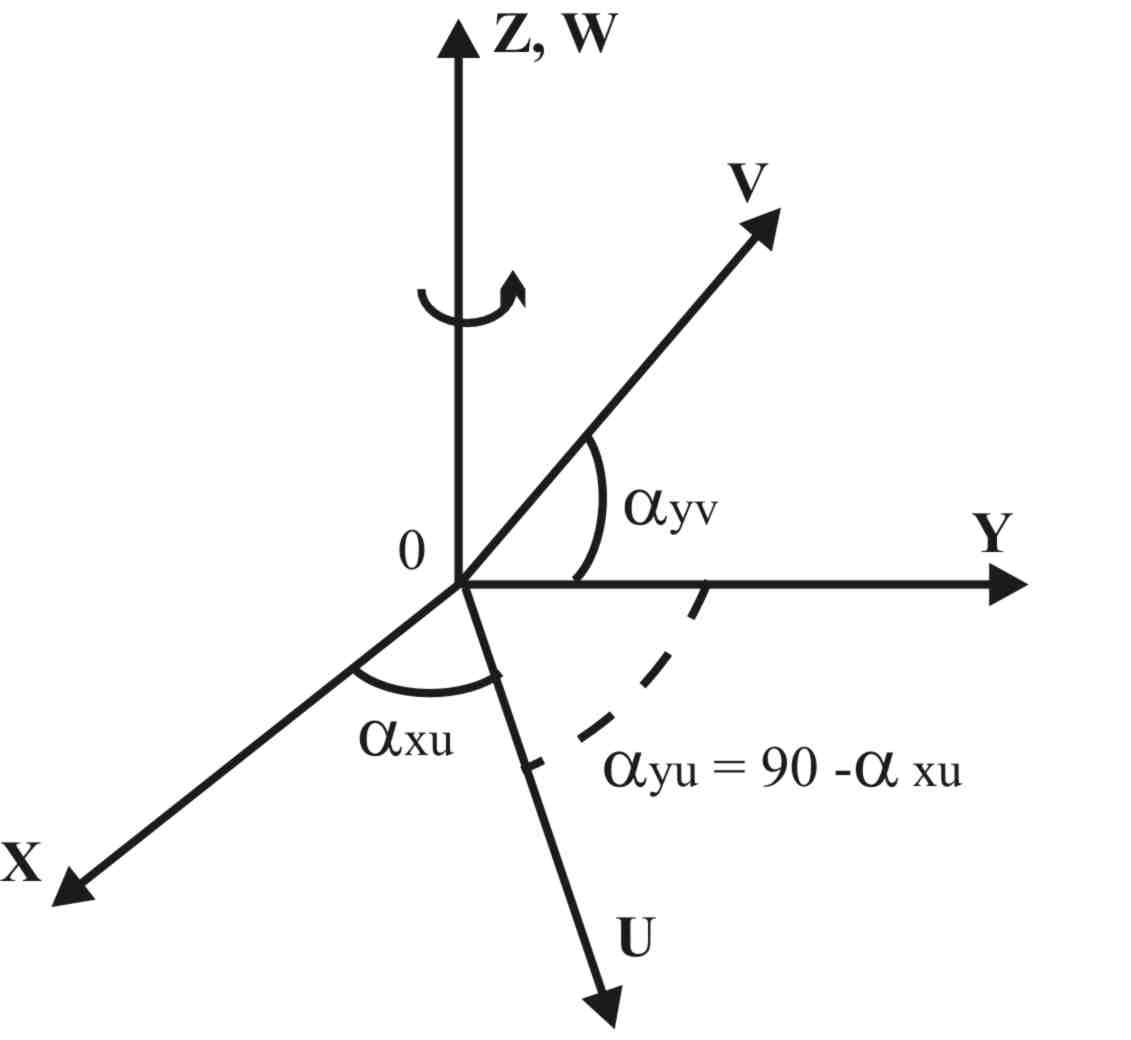
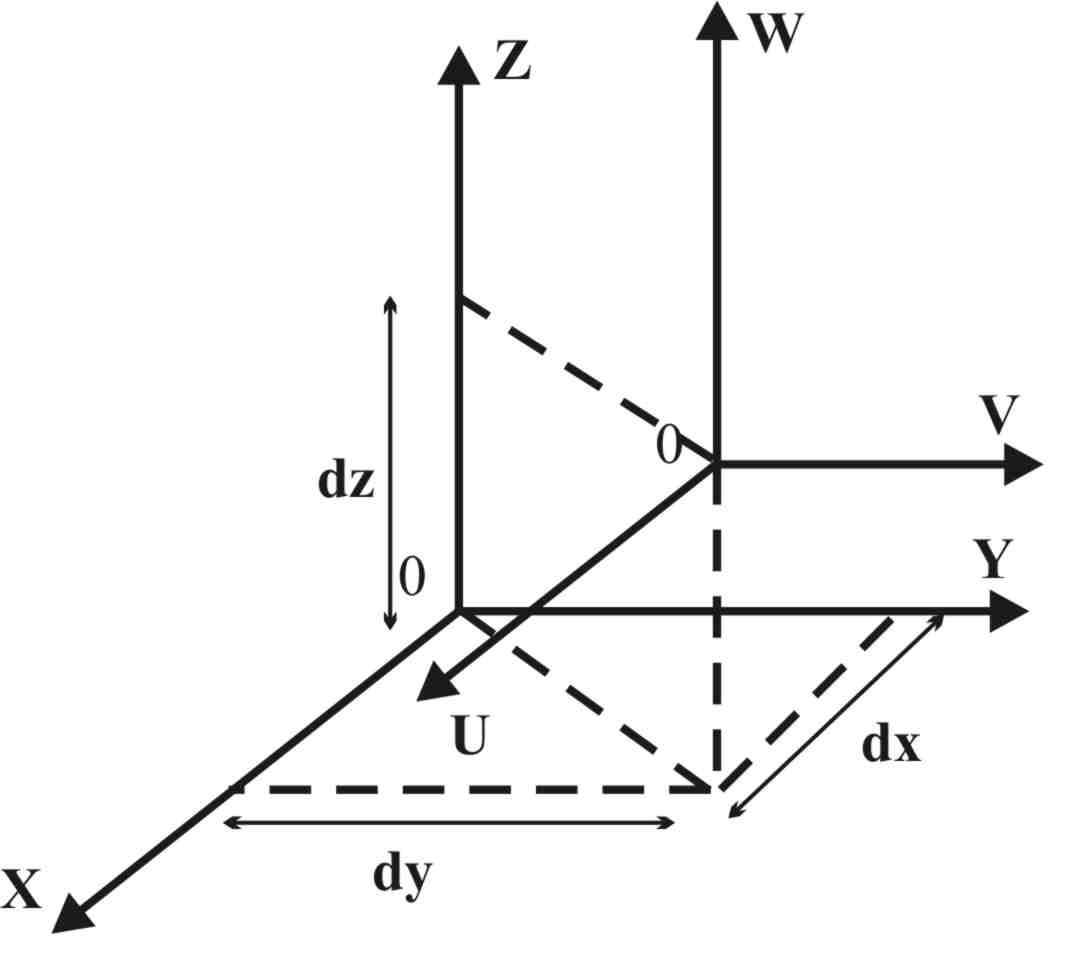
a б
Рис. 3.2. Взаємозв’язок між системою координат захоплювача та базовою системою координат