

Особливості позиційного управління
Роботи з позиційним управлінням зазвичай середніх розмірів, з електричними приводами та позиційним зворотним зв’язком. Таким чином, такі роботи за типом управління належать до замкнених слідкуючи систем. Тут необхідно задавати початкову, кінцеву та декілька проміжних точок та забезпечити проходження маніпулятора через ці точки. Обраховується траєкторія між вказаними точками разом із керуючими впливами, а у випадку необхідності в проміжних точках як траєкторія, так і керуючі впливи можуть корегуватися.
Особливості неперервного контурного управління
Роботи з неперервним контурним управлінням зазвичай можуть досягти будь-яку точку в межах робочого простору та мають стільки контрольних точок в траєкторії, скільки необхідно для виконання конкретної задачі. При необхідно точки можуть додаватися до вже обчисленої траєкторії. Це забезпечує надзвичайну гнучкість даного типу управління, тому вказаний метод застосовується для таких складних технологічних задач як контактне зварювання або фарбування розпилюванням..
Проте системи з неперервним контурним управлінням є найдорожчими, оскільки вони потребують потужні обчислювальні можливості для зберігання в пам’яті значного масиву точок траєкторії. Такий тип управління відноситься до високого технологічного управління. Безперечно, що роботи з неперервним контурним управлінням потребують позиційного зворотного зв’язку для забезпечення високої точності позиціонування.
Якщо маніпулятор має рухатися повільно, то можна окремо управляти кожним зчленуванням, оскільки зовнішні динамічні сили, що діють на систему, відносно малі та їх можна не враховувати. Таке управління називається незалежним.
Якщо рухи маніпулятора є швидкими, то взаємний динамічний вплив різних сил (каріолісових, центр обіжних, інерціальних та ін.) стає значним. В цьому випадку нелінійні алгоритми управління мають використовуватися.
Об’єктом управління є маніпулятор, який розглядається як відкрита кінематична ланка. Керованим параметром є задані кути в зчленуваннях i. Цей параметр може бути виміряний різними датчиками положення, наприклад простим потенціометром або дорогим оптичним енкодером. Щоб змінити кути в зчленуваннях система управління роботом повинна включати виконавчий пристрій (привід) – двигун, який створює необхідний момент i. Таким чином, замкнена слідкуючи система управління роботом може бути представлена в загальному випадку наступним чином (рис. 4.1).
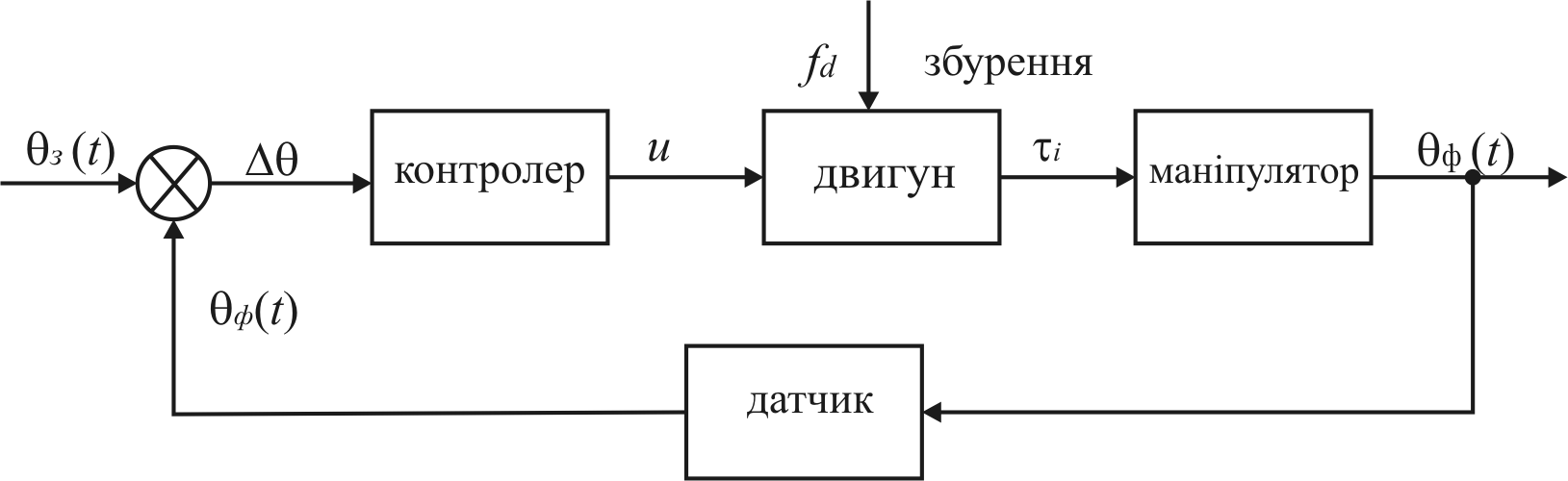
Рис. 4.1. Загальна структура системи управління роботом
Тут контролер використовується для перетворення заданої траєкторії, вираженої через залежність кутів у зчленуваннях від часу з(t), в напругу управління на вході двигуна u. Функція елемента порівняння – генерування сигналу, пропорційного помилки між заданим значенням кута з(t) та його фактичним значенням ф(t).
Характеристики під-регулятора
ПІД-регулятор є корегуючою послідовною ланкою з наступною передатною функцією:
![]() .
.
Пропорційна ланка (Kp) впливає на показники якості перехідного процесу наступним чином: вона зменшує час відпрацювання та зменшує, проте не усуває усталеної помилки повністю. Інтегруюча ланка (Ki) має один-єдиний ефект: вона повністю усуває усталену помилку, проти значно погіршує усі інші показники якості. Диференціююча ланка (Kd) покращує стійкість системи, зменшує перерегулювання та поліпшує перехідну характеристику системи в цілому. Ефекти від впливу кожної ланки Kp, Kd, та Ki на замкнену систему підсумовані у табл. 4.1.
Таблиця 4.1