

2.3. Уровни частоты
Частота напряжения в СЭЭС отечественных судов принята равной 50 Гц. На судах где массогабаритные показатели являются решающими (суда с динамическими принципами поддержания) применяется 400 Гц.
Рассмотрим влияние повышения частоты на массогабаритные показатели ЭО.
Отметим вначале положительные стороны повышения частоты в СЭЭС:
Снижаются массогабаритные показатели генераторных агрегатов (ГА). Данное утверждение иллюстрируют параметры, представленные в табл. 2.2, и рис. 2.1.
Таблица 2.2.
Тип ГА |
Мощность (кВт) |
Вариант исполнения |
f, (Гц) |
n, (об/мин) |
Масса, (т) |
ТГ |
3000 |
безредукторный |
50 |
3000 |
25,5 |
редукторный |
50 |
10000 |
21,5 |
||
безредукторный |
400 |
8000 |
10,8 |
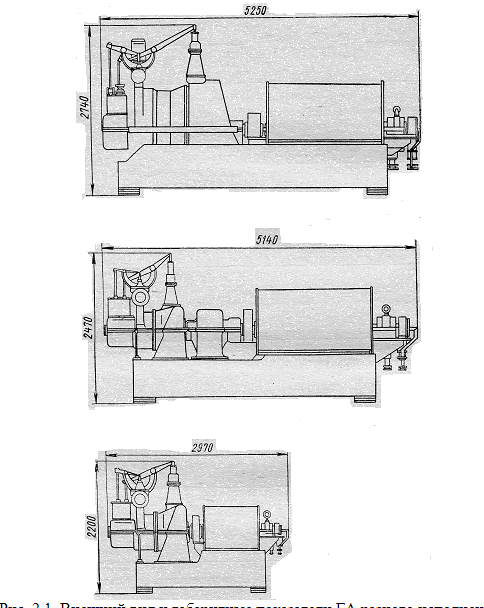
Рис. 2.1. Внешний вид и габаритные показатели ГА разного исполнения
Причиной этого являются:
исключение редуктора при сочленении ПД и СГ. Частота вращения связана с электрической частотой следующим соотношением

где n – частота вращения первичного двигателя (об/мин), f – частота сети (Гц), p – число пар полюсов. Для сетей с частотой 50 Гц она составляет 3000 об/мин, а для сетей с частотой 400 Гц – 24000 об/мин, что позволяет при стыковке СГ с первичными высокоскоростными двигателями (ПД) исключить редуктор, а, следовательно, уменьшить вес ГА;
улучшение показателей ПД;
улучшение показателей самого генератора. Так генератор мощностью 50 кВт выполненный на 50 Гц и частоту вращения 1500 об/мин весит 600 кг, а генератор такой же мощности на 400 Гц и частоту вращения 12000 об/мин – 150 кг (рис. 2.2). Обычно, при оценке массогабаритных показателей генераторов полагают, что в заданном объеме
 .
.

Рис. 2.2. Внешний вид генераторов мощностью 50 кВт на 50 Гц и 400 Гц
2. Повышенная частота позволяет увеличить частоту вращения механизмов и электроприводов в 2…3 раза, что приводит к существенному уменьшению габаритов и массы агрегатов двигатель – механизм. Так переход от частоты вращения 3000 об/мин к частоте вращения 8000 об/мин дает снижение массы АД в 2,5…3,5 раза и габаритов в 2,5 раза (рис.2.3).
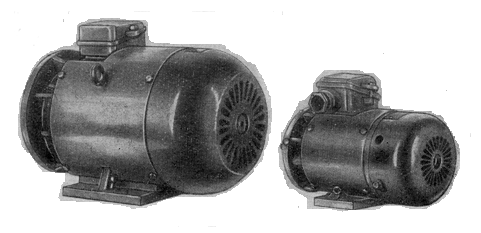
Рис. 2.3. Внешний вид АД мощностью 3,2 кВт на 50 Гц с частотой вращения
3000 Об/мин, и на 400 Гц, с частотой вращения 8000 об/мин
3. Улучшаются массогабаритные показатели трансформаторов, дросселей, магнитных усилителей. Убедимся в этом с помощью простых соотношений.
По
закону электромагнитной индукции
Фарадея
 где Ψ – потокосцепление, Ф – поток, W
– число витков, е – э.д.с. Полагая
U=E
и U=Umsin(ωt),
а следовательно и Ф=Фmsin(ωt)
получим:
где Ψ – потокосцепление, Ф – поток, W
– число витков, е – э.д.с. Полагая
U=E
и U=Umsin(ωt),
а следовательно и Ф=Фmsin(ωt)
получим:
 ,
учитывая, что соs(ωt)=-
sin(ωt-π/2),
е=ωФmWsin(ωt-π/2),
,
учитывая, что соs(ωt)=-
sin(ωt-π/2),
е=ωФmWsin(ωt-π/2),
Еm
=2πfФmW,
а
 ,
где В – индукция, S – сечение.
,
где В – индукция, S – сечение.
Таким
образом, если Е400= Е50,
то
 .
.
Реальное
преимущество рассматриваемых видов
оборудования на 400 Гц ниже. Это связано
с тем, что магнитопроводы изготавливают
из электропроводящего материала, в
котором под действием переменного
магнитного поля возникают микротоки –
токи Фуко или вихревые токи. Электрическое
сопротивление стали мало, а значит,
вихревые токи могут достигать большого
значения, что приводит к разогреву
магнитопровода - потери в стали оценивают
пропорциональными f1,3…1,5.
Поэтому для сохранения теплового баланса
в высокочастотном оборудовании снижают
индукцию Вm 400 <
Вm 50, плотность тока
и стальные сердечники набирают из более
тонких пластин: 50 Гц - толщина пластин
0,35 мм, 400 Гц – 0,08 мм. Сравнение существующего
оборудования показывает, что в заданном
объеме трансформатора
 .
.
4. Сокращается время переходных процессов. Рассмотрим это более подробно.
При увеличении частоты с 50 до 400 Гц и одновременном увеличении частоты вращения при той же мощности размеры генератора, периметр витка обмотки статора и число витков уменьшаются.
Постоянная
времени обмотки равна
 .
Выразим индуктивность через конструктивные
параметры машины:
.
Выразим индуктивность через конструктивные
параметры машины:
 по закону полного тока
по закону полного тока
 ;
;
тогда
 в свою очередь
в свою очередь
 ,
отсюда
,
отсюда
 ,
в представленных выражениях использованы
следующие обозначения: Н –
напряженность поля; μ – магнитная
проницаемость; μ0= 4π10-7
(Гн/м); λ – магнитная проводимость.
,
в представленных выражениях использованы
следующие обозначения: Н –
напряженность поля; μ – магнитная
проницаемость; μ0= 4π10-7
(Гн/м); λ – магнитная проводимость.
Проводимость, при прочих равных условиях, уменьшается пропорционально периметру витка. Активное сопротивление R уменьшается пропорционально уменьшению числа витков и уменьшению их периметра. Таким образом, постоянные времени уменьшаются приблизительно пропорционально уменьшению числа витков.
Следует
отметить, что индуктивные сопротивления
обмотки, определяемые
 ,
увеличиваются. Это происходит из-за
того, что число витков обмотки статора
уменьшается не прямо пропорционально
увеличению частоты.
,
увеличиваются. Это происходит из-за
того, что число витков обмотки статора
уменьшается не прямо пропорционально
увеличению частоты.
К недостаткам применения высокой частоты следует отнести:
1. Отсутствие унификации с береговой сетью;
2. Отсутствие серийного оборудования;
3. Увеличение потерь в кабелях.
Кабель имеет активное R и индуктивное Х сопротивления. Рассмотрим характер и причины их изменения при повышении частоты:
1.
При прохождении переменного тока по
проводнику в нем, из-за скин-эффекта и
эффекта близости, происходит вытеснение
тока к поверхности. Чем выше частота и
чем толще проводник тем в большей степени
проявляется неравномерность распределения
тока по сечению проводника. Это приводит
к уменьшению полезного сечения проводника
и как следствие – увеличению сопротивления
и потерь в нем. Для учета этого явления
используется следующая эмпирическая
формула:
 ,
где R~ - активное сопротивление
кабеля на переменном токе; R-
- активное сопротивление кабеля на
постоянном токе; к - коэффициент
пропорциональности.
,
где R~ - активное сопротивление
кабеля на переменном токе; R-
- активное сопротивление кабеля на
постоянном токе; к - коэффициент
пропорциональности.
Значение коэффициента пропорциональности зависит от частоты тока и количества жил в кабеле:
- 50 Гц к=1;
- 400 Гц: количество жил – 1 к=1, 25; количество жил 2,3 к=1, 45.
2. Х= ωL, т.е. Х400=8·Х50.