

А) для тормозного режима; б) для тягового и комбинированных режимов.
VB — скорость автомобиля, задаваемая водителем;
Vф — фактическая скорость автомобиля;
∆ — отклонение скорости;
Fупр — усилие управления тормозным приводом;
αр — воздействие на рулевое управление;
Мт — тормозной момент;
s — параметр регулирования САБ (например, проскальзывание колеса);
σ — управляющий сигнал
Таким образом, для управления автомобилем в соответствии с текущей ситуацией все устройства, отвечающие за отдельные аспекты активной безопасности транспортного средства, должны быть интегрированы в единую систему активной безопасности на общей конструктивной и функциональной базе.
Теоретическая основа такого единого комплекса должна быть универсальной для всех возможных режимов движения, чтобы система активной безопасности могла правильно реагировать на любую дорожно-транспортную ситуацию и сверх этого прогнозировать вероятный процесс движения мобильной машины. Вариант структурной схемы такого комплекса показан на рис. 8. Здесь представлены возможные основные параметры. В частных случаях их следует рассматривать применительно к конкретной системе активной безопасности.
Все параметры движения одиночного колеса и автомобиля, участвующие в регулировочном процессе, можно сгруппировать по своему функциональному назначению в четыре блока.
Первый блок определяет измеряемые напрямую величины. Исходя из назначения САБ и современного состояния в области сенсорики, целесообразно получать измерительные сигналы следующих параметров:
для колеса — давление в исполнительных аппаратах тормозной системы, угловая скорость колеса и ее производная, нормальная нагрузка на колесо, сила в контакте колеса с дорогой;
для автомобиля — реальная скорость автомобиля и ее производная, угол поворота рулевого колеса, инерционная скорость автомобиля, поперечное ускорение, дистанция до других транспортных средств или препятствий.
В следующем блоке представлены основные параметры, характеризующие динамику движения транспортного средства и являющиеся показателями качества регулирования. К ним следует отнести:
для колеса — проскальзывание колеса в боковом и продольном направлениях, момент сил в контакте колеса с дорогой;
для автомобиля — линейная скорость движения автомобиля, угол курсового увода автомобиля, инерционный момент автомобиля относительно вертикальной оси.
Третьим блоком является блок управляющих воздействий, в который входят давление в тормозном приводе или усилие управления тормозным механизмом и момент двигателя (крутящий момент, подводимый к ведущим колесам).
Завершающий блок составляют показатели, оценивающие работу системы активной безопасности. Эффективность САБ целесообразно оценивать по нескольким группам критериев: конструктивным, функциональным, экономическим, эксплуатационным и эргономическим. Исходя из опыта эксплуатации современных систем активной безопасности, первоначально можно выделить следующие конкретные оценочные показатели для их работы:
в тормозном режиме — достигаемый тормозной путь, среднее значение удельной тормозной силы в процессе регулирования, замедление автомобиля, обеспечиваемое остаточным объемом рабочего тела тормозного привода,
в тяговом режиме — ускорение при разгоне транспортного средства, максимальная скорость движения, удельная тяговая окружная сила,
во всех режимах движения — частота работы системы, угол курсового увода, расход рабочего тела, усилие и скорость поворота рулевого колеса, степень реализации сцепления колеса с дорогой, границы устойчивости и управляемости автомобиля
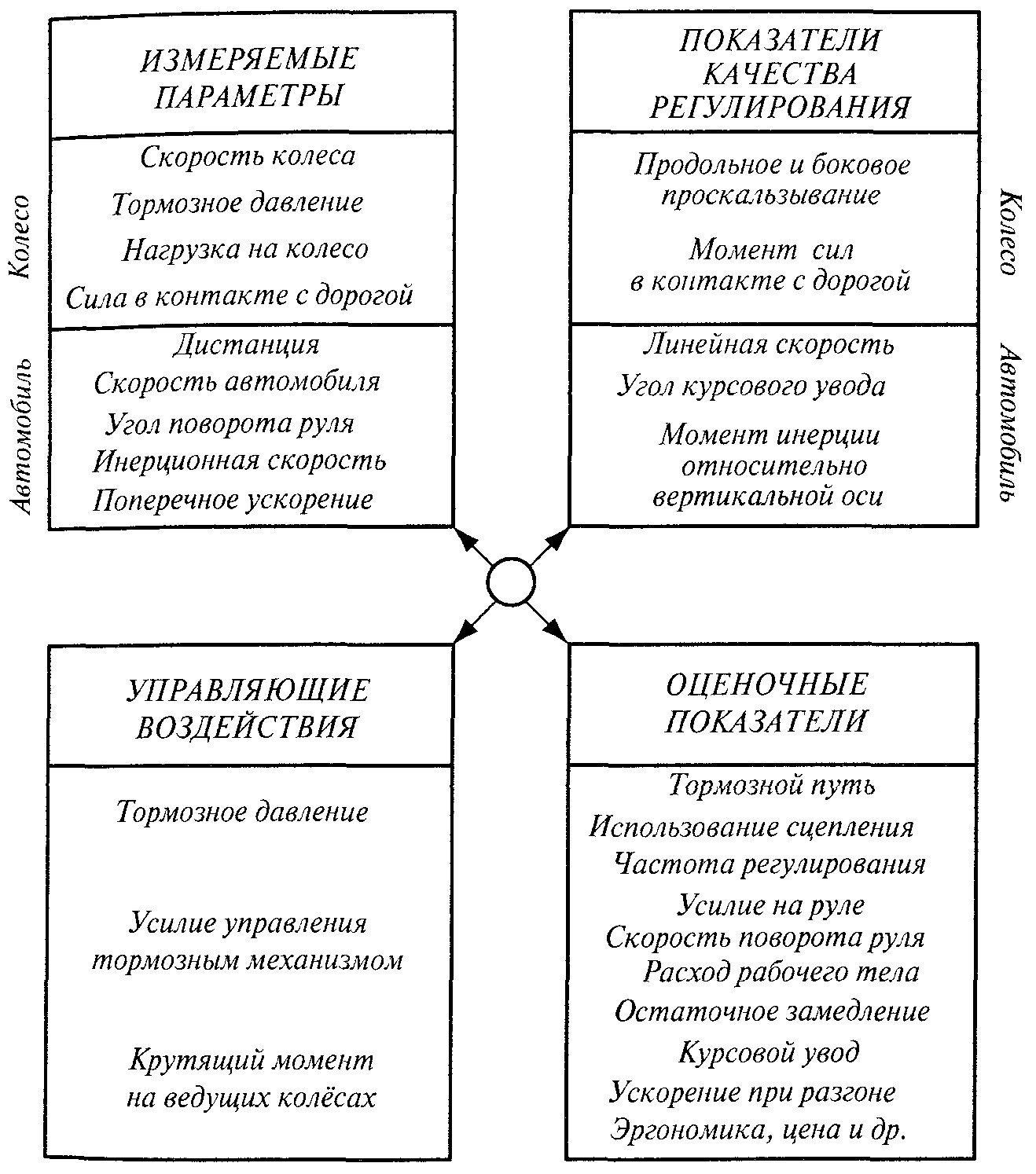
Рис. 1.20 Структурные блоки системы активной безопасности
СИСТЕМЫ АКТИВНОЙ БЕЗОПАСНОСТИ |
Тормозная система |
· ABS · BA · DBC · EBS · EBV · HAH · Brake by Wire · EBD · SBC · |
Рулевое управление |
· AFS · |
Трансмиссия |
· ASR · EDS · ESP · STC · MATC · MASC ·DSTC · DSA · TRACS · |
Подвеска |
· Dynamic Drive · EDC · |
Другие системы |
· EyeQ · BLIS · APS · PMD · AFIL · Stop&Start · Volvo On Call · LDW · ARP · ACC · ADR · RSC · ROPS · IAQS · SmarTire · Pre-Safe · Pre-Crash Safety System · X-Pressure · |