

Лекция № 8
Асинхронные машины
Вращающееся магнитное поле 3ф системы токов

а)
б)
На рис. а) изображен стальной цилиндр, набранный из листовой электротехнической стали с внутренними пазами под углом 120° друг к другу.
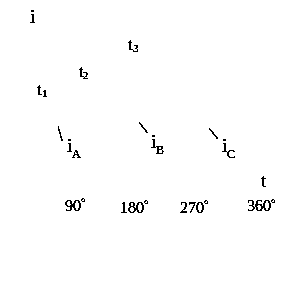
В пазах расположены три обмотки, начала которых подсоединены к сети 3ф переменного тока, а концы объединены в общую точку. Положительное направление токов от начала к концам обмоток. Синусоидальные токи IA;IB;IC создают намагничивающие силы FA; FB; FC , вектора которых совпадают с осью соответствующих обмоток. Направление и величину этих пульсирующих н.с. легко определить с помощью временной диаграммы фазных токов на рис б).
На рис а) результирующая
н.с.
![]() и ее составляющие
и ее составляющие
![]() ;
;
![]() ;
;
![]() показаны для момента времени t1
(рис б). Из рис б) легко видно, что:
показаны для момента времени t1
(рис б). Из рис б) легко видно, что:
=ImW; = = - 1/2 ImW ; = + + =3/2 ImW
По аналогии для моментов времени t2;t3 и т.д. Значение результирующий н.с. =3/2 ImW.Однако для t2 и t3 будет совпадать с осью обмоток фаз В и С, а , следовательно, будет поворачиваться по часовой стрелке, т.е. поле будет вращаться.
На рис а) для времени t2 и t3 вектор показан пунктиром. Это поле является двухполюсным, т.к. из одной части (полюса) N магнитные силовые линии выходят, а в другую часть (полюс) S – входят. Полюса перемещаются в пространстве непрерывно. За 1 период поле делает 1 оборот. Скорость вращения его n0=60f1=60*50=3000 об/мин. Направление вращения поля совпадает с порядком чередования фаз А→В→С. Изменив порядок чередования фаз (поменять зажимы двух фаз) изменим направление вращения поля.
Общая формула
скорости вращения магнитного поля n0=![]() ,
где f – частота сети, r – число пар полюсов
обмоток; 2r – число полюсов.
,
где f – частота сети, r – число пар полюсов
обмоток; 2r – число полюсов.
Изменяя f изменяем плавно n0; увеличивая r(от 1, 2,3…n) уменьшаем дискретно n0. Увеличение r достигается увеличением числа обмоток.
Устройство асинхронного двигателя(АД)
Рассмотренное выше возбуждение вращающегося магнитного поля используется в АД.
АД состоит из: статора (неподвижная часть), ротора (вращающаяся часть), корпуса. Корпус выполняется из стали, чугуна или алюминия. По нему магнитный поток не замыкается. Статор представляет собой цилиндр из штампованных листов электротехнической стали. В пазах цилиндра расположены обмотки, питаемая от сети переменного 3ф тока. Внутри статора расположен ротор, набранный из листов электротехнической стали. На поверхности ротора пазы, в которых расположена обмотка. АД бывают с фазным (вкладывается обмотка в пазы) ротором и с К.З. ротором (в пазы заливается цветной металл, застывшие стержни по торцам ротора замыкаются кольцами (по типу беличьей клетки).Фазный ротор имеет 3ф обмотку, три конца которой присоединены к контактным кольцам расположенным на валу ротора. Через кольца в цепь ротора вводятся добавочные активные сопротивления.
Принцип действия АД: под действием приложенного к обмоткам статора Uсети по ним протекают фазные токи, создающие магнитный поток (вращающееся магнитное поле). Этот поток, пересекая обмотку ротора, наводит в ней эдс ротора, под действием которой по обмотке ротора протекают токи, создающие магнитное поле ротора. Взаимодействие полей статора и ротора обеспечивает вращение ротора АД. (Подробно устройство АД проработать самостоятельно). Т.е. происходит преобразование электроэнергии, потребляемой из сети в механическую на валу АД.
Режимы ХХ и ИХХ АД.
Приведение рабочего режима АД с вращающимся ротором к неизв.
Рассмотрим АД с
фазным ротором, обмотка которого
разомкнута, а статорная обмотка подключена
к сети переменного 3ф тока. Магнитное
поле статора со скоростью n0
пересекает витки ротора и наводит в них
эдс. При этом Iр=
0;Мвр=0;n=0
(число оборотов ротора). Частота эдс в
неподвижной разомкнутой обмотке ротора
определяется fн=![]() =
=![]() =f1,
т.е. равна частоте сети. Как у тр-ра, и
нет преобразования эл. энергии в
неэлектрическую. В этом отличие от АД
с вращающимся ротором, где есть
преобразование.
=f1,
т.е. равна частоте сети. Как у тр-ра, и
нет преобразования эл. энергии в
неэлектрическую. В этом отличие от АД
с вращающимся ротором, где есть
преобразование.
Если замкнуть обмотку ротора накоротко (или через добавочное активное сопротивление), то ротор АД будет вращаться со скоростью n<n0 (из-за механических потерь (подшипники, вентилятор)). Это будет режим ХХ (отсутствие нагрузки на валу). Неравенство скоростей вращения ротора и поля статора, т.е. асинхронность, и лежит в основе названия АД.
Если добавочными силами (добавочный двигатель, присоединенный к валу АД, или масса электропоезда, движущегося под уклон) достичь скорости вращения ротора АД равной n0, т.е. n=n0, то получим режим ИХХ. При этом поле статора не пересекает витков ротора (синхронное вращение) и Iр=0 Eр=0. Если же подобным образом увеличим n>n0, то АД будет отдавать эл. энергию в сеть, т.е. работать в режиме генераторного торможения (преобразует механическую энергию в электрическую и отдает в сеть, что экономически выгодно и часто используется). Отметим, что при ХХ I10≈(0,2-0,4)I1H, а у тр-в в (10-20) раз меньше. (Это объясняется большим воздушным зазором между статором и ротором). У тр-в такого зазора практически нет.