

13. Метод производной по времени. Сэу с управлением по производной
Для организации поиска и поддержания экстремума СЭУ с управлением по производной предполагается, что
Функциональная схема системы представлена на рисунке. Здесь Д1, Д2 - дифференциаторы.
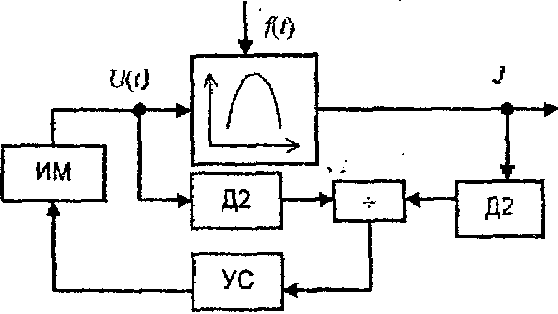
Исполнительный механизм ИМ вырабатывает управляющее воздействие U(t), которое поступает на ОУ и меняет положение рабочей точки таким образом, что dJ/dU стремится к нулю. Скорость движения пропорциональна dJ/dU, а направление движения определяется знаком dJ/dU.
Недостатки метода:
- в момент включения СЭУ dJ/dt и dU/dt равны нулю. Следовательно, существует неопределенность в операции деления в начальный момент времени и задача поиска экстремума становится тоже неопределенной. Поэтому в начальный момент времени необходимо подавать некоторый дополнительный сигнал dU/dt. Однако в процессе работы также возможно случайное равенство нулю производных;
- изменение J может вызываться не только управляющим воздействием U(t), но и возмущением f, что приводит к отклонению значения производной dJ/dt от ее истинного значения и, следовательно, увеличению времени поиска экстремума и дополнительным погрешностям его поддержания;
- наличие дифференциаторов.
Указанные недостатки ограничивают применение данной СЭУ.
Возможен другой вариант рассмотренной СЭУ, не содержащий блока деления:
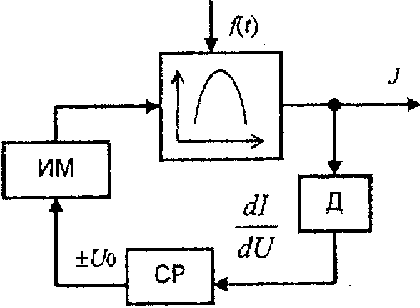
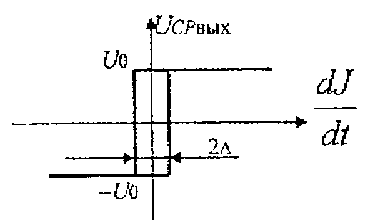
Здесь СР - сигнум-реле, выходная величина которого может принимать лишь дна значения - ±U0:
причем сигнум-реле обладает зоной нечувствительности :
Рассмотрим подробнее работу схемы. Пусть объект управления имеет экстремальную статическую характеристику (график 1 на рис.3.35). В момент включения состояние СЭУ определяется некоторыми значениями управляющего воздействия u1 и значением управляемой величины J1.
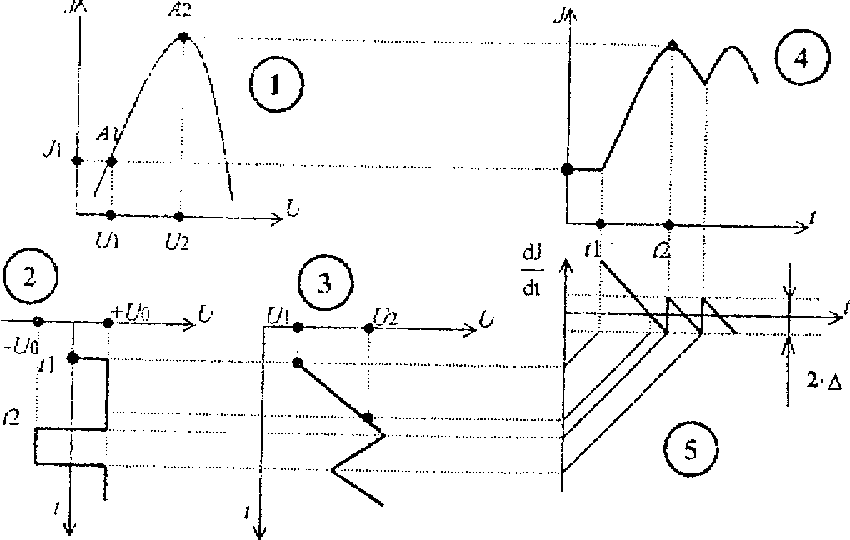
Рис. 3.35
Предположим, что в момент времени t1 включения системы на выходе СР возникает положительный сигнал (график 2). Этот сигнал, поступая на исполнительный механизм (в простейшем случае интегратор), вызывает увеличение его выходной величины U (график 3).
Под влиянием U выходная величина J на выходе объекта будет изменяться, т.е. расти в соответствии со статической характеристикой объекта управления (график 4). dJ/dt (при изменении J от А1 до А2 будет уменьшаться до нуля. В момент времени t2, когда J достигнет своего максимального значения, dJ/dt=0.
Однако в точке экстремума движение не прекратится, а за счет зоны нечувствительности изменение СР будет продолжать движение, удаляясь в противоположную сторону от экстремума. Когда dJ/dt с отрицательным знаком превысит зону нечувствительности СР (график 5), последнее сработает и изменит полярность сигнала на своем выходе (момент времени t3). Отрицательная полярность U0 на выходе СР вызовет реверс ИМ и, следовательно, уменьшение U, J снова станет приближаться к экстремальному значению и т.д. В системе возникнут незатухающие колебания вокруг экстремальной точки, амплитуда которых зависит от крутизны экстремальной статической характеристики вблизи точки А2, а также от величины .
Достоинством данной системы является техническая простота. К недостаткам можно отнести малое быстродействие, невысокую помехоустойчивость и наличие поисковых сигналов.