

10. Снс с оптимизацией качества управления. Системы экстремального управления (сэу)
Задачей самонастраивающейся системы со стабилизацией качества управления является достижение заданного значения показателя качества работы системы. Задачей адаптивной системы с оптимизацией качества является нахождение и поддержание некоторого экстремального значения показателя качества в условиях воздействия возмущений, причем это экстремальное значение заранее не задается и неизвестно. Такие адаптивные системы называют еще системами экстремального управления (СЭУ).
Рассмотрим следующий пример. Пусть в качестве объекта управления выступает технологический процесс токарной обработки. Показателем качества работы J системы управления таким объектом может служить износ режущего инструмента по задней поверхности hoп3, а управляющим воздействием - скорость резания V.
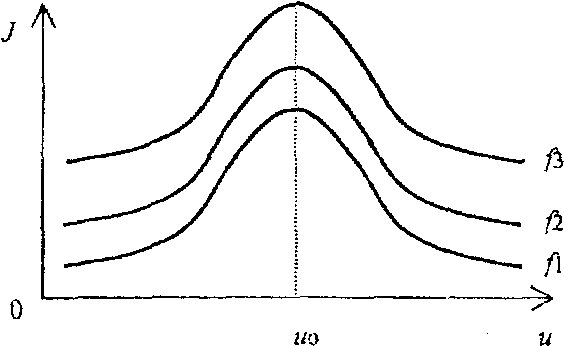
Технологическими исследованиями установлено, что зависимость hoп3 от V имеет экстремальный характер, причем точка экстремума может смещаться под действием возмущений, например при изменении твердости обрабатываемого материала НВ.
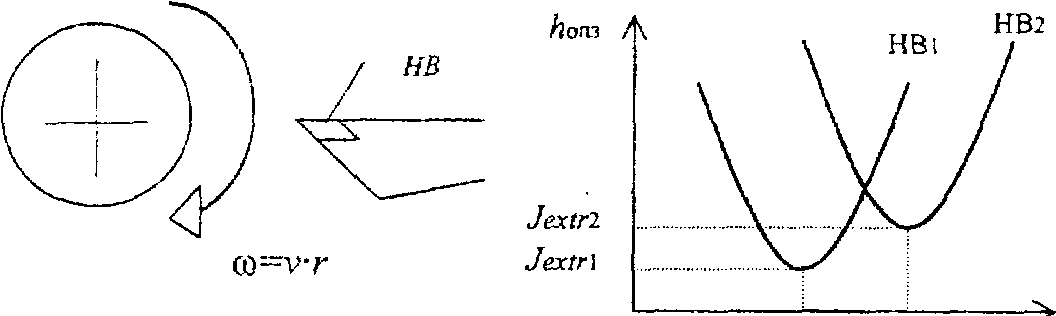
Задачей управления в данном случае будет нахождение и поддержание с заданной точностью экстремального значения J= hoп3(V).
И в общем случае задачей СЭУ является автоматическое нахождение и поддержание с необходимой точностью экстремума заданного показателя качества J.
Отметим, что задачей обычной замкнутой САУ является сведение ошибки управления ε(t) к нулю (рис. 3.14).
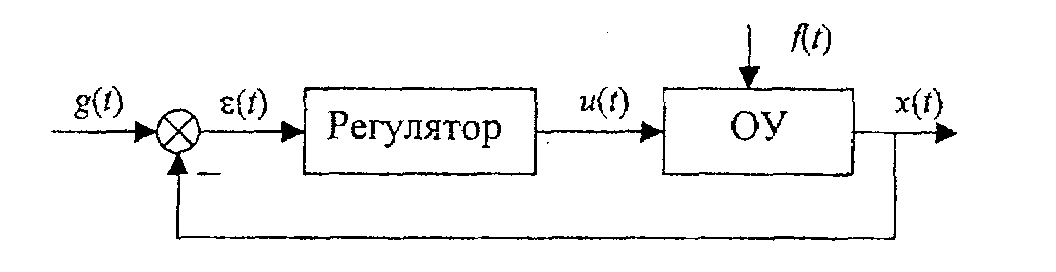
Рис. 3.14
Если:
-![]() то
такая система называется системой
стабилизации;
то
такая система называется системой
стабилизации;
-![]() (известная
функция времени)
-
системой программного управления;
(известная
функция времени)
-
системой программного управления;
-
![]() (неизвестная
функция времени)
-
следящей системой.
(неизвестная
функция времени)
-
следящей системой.
В
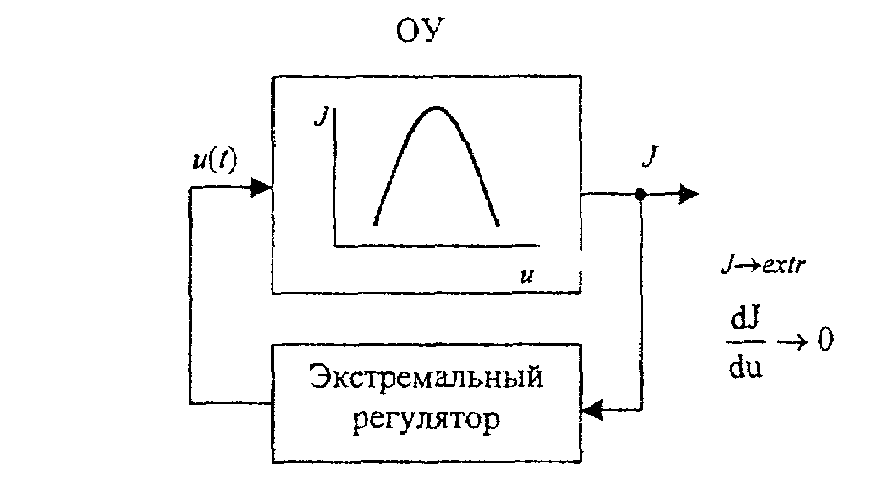
СЭУ управление происходит иначе. ОУ СЭУ
-
объект с экстремальными характеристиками
(в простейшем случае статическими).
В качестве ошибки управления здесь
выступает отклонение J
от его экстремального значения (в
конечной форме) или производная -
![]() (в
дифференциальной форме), где u
-
управляющее воздействие на экстремальный
ОУ.
(в
дифференциальной форме), где u
-
управляющее воздействие на экстремальный
ОУ.
Случаи, в которых применение СЭУ нецелесообразно:
- экстремум неподвижен на плоскости;
- экстремум перемещается по вертикали.
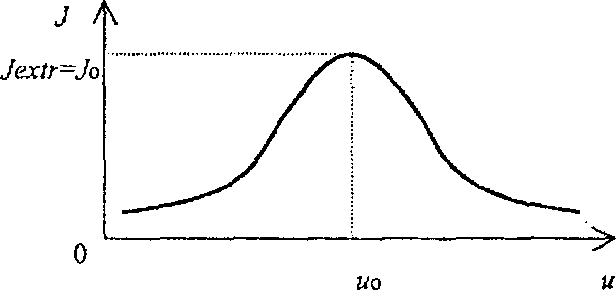
Поиск экстремума J имеет смысл только в том случае, если точка (u0, J0) перемещается по плоскости в горизонтальном направлении. В противном случае задача управления может быть решена с помощью обыкновенной системы стабилизации (т.к. u=const).
11. Сэу с принципом управления по возмущению и по отклонению
1) СЭУ с принципом управления по возмущению
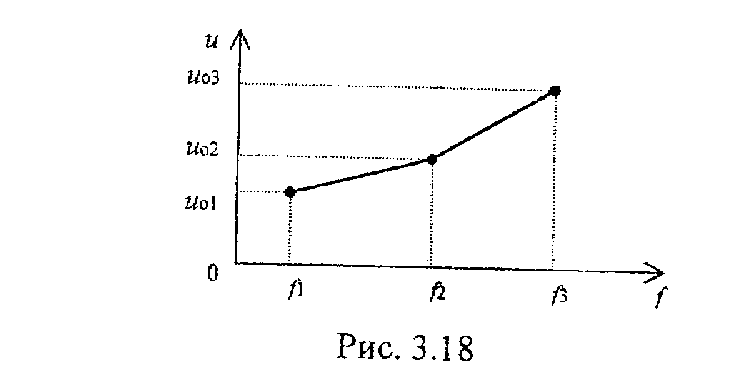
В том случае, если априори имеются данные о экстремальных статических характеристиках ОУ, то, пользуясь ими, можно заранее определить характеристику компенсации u0=F(f).
С изменением возмущений меняется управляющее воздействие u(t) в соответствии с характеристиками компенсации. В процессе управления выходная величина J объекта принимает экстремальные значения.
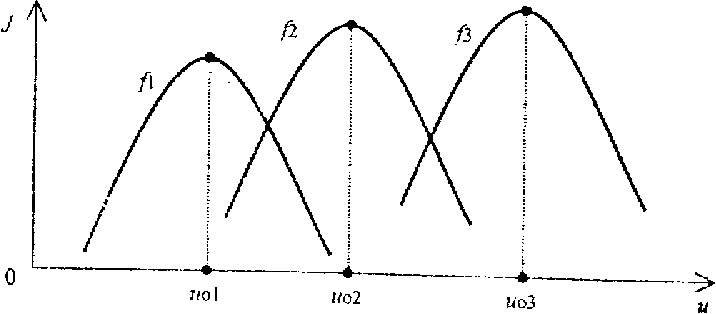
Рис. 3.19
Схема СЭУ в этом случае приведена на рис. 3.20.
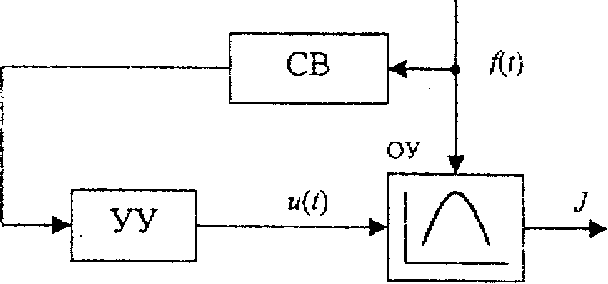
Рис. 3.20
Здесь: СВ - связь по возмущению, с помощью которой измеряется и преобразуется f(t). Система является незамкнутой, так как J непосредственно не измеряется.
К недостаткам системы можно отнести следующее:
- необходимость измерять f(t), что практически в большинстве случаев труднореализуемо;
- необходимость иметь семейство экстремальных характеристик объекта.
2) СЭУ с принципом управления по отклонению
Данные системы относятся к замкнутым системам. Для формирования управляющего воздействия используется либо отклонение J=J-J0, либо производная dJ/du. Задача управления в такой СЭУ решается следующим образом.
В том случае, когда J является функцией одной переменной (рис 3.21), направление движения к экстремуму определяется знаком dJ/du:
- в точке А: dJ/du>0;
- в точке В: dJ/du<0;
- в точке С: dJ/du=0.
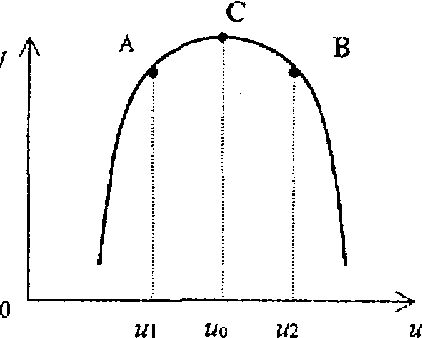
Рис. 3.21
Отсюда следует, что для движения в сторону экстремума необходимо:
- в точке А - увеличивать u;
- в точке В - уменьшать u;
- в точке С - u = u0.
В общем случае, когда J является функцией нескольких переменных (управляющих воздействий), J=J(u1,u2,u3), то управление движением к экстремуму будет определяться градиентом функции J. Градиент функции - это вектор, проекция которого на оси координат равны соответствующим частным производным (рис.3.22).

где k1, …, kn - единичные базисные вектора, по которым отчисляются u1, …, un.
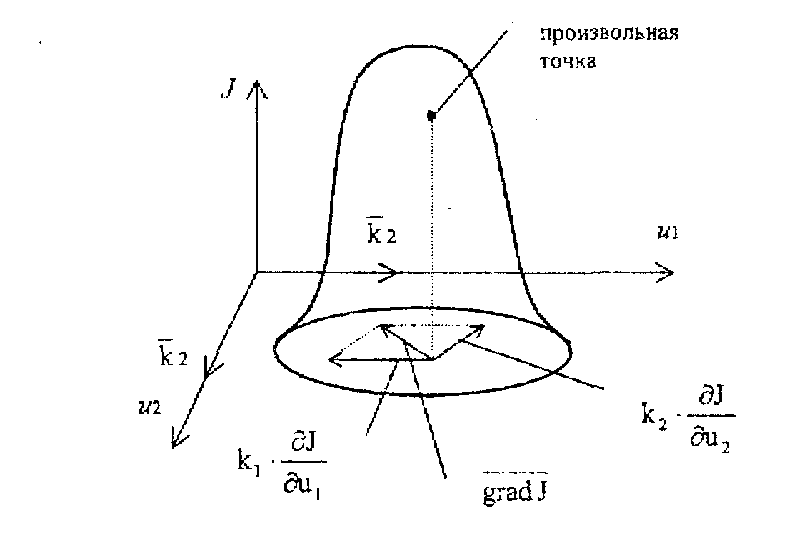
Рис. 3.22
Вектор-градиент J направлен в сторону наибольшего возрастания функции J. В точке экстремума градиент J=0. Для нахождения экстремума используются поисковые и беспоисковые методы.