6. Снс с моделью и большим коэффициентом усиления
В системах управления, где возможна реализация больших коэффициентов усиления, возможно построение адаптивного контура без традиционной параметрической настройки регулятора основного контура. Один из вариантов структурной схемы такой системы представлен на рисунке.
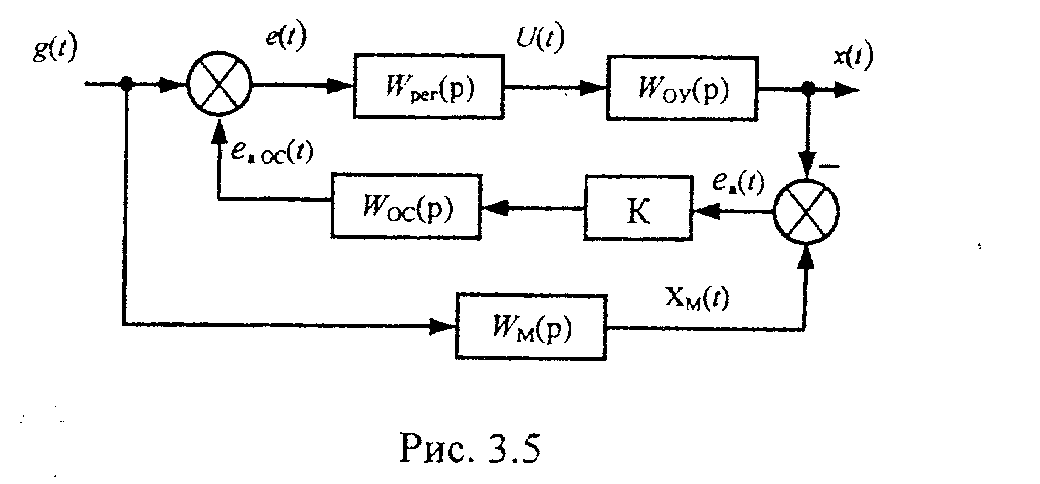
В цепь обратной связи системы вместе со звеном Wос(р) включено звено с большим коэффициентом усиления к. Уравнения элементов системы будут следующими:
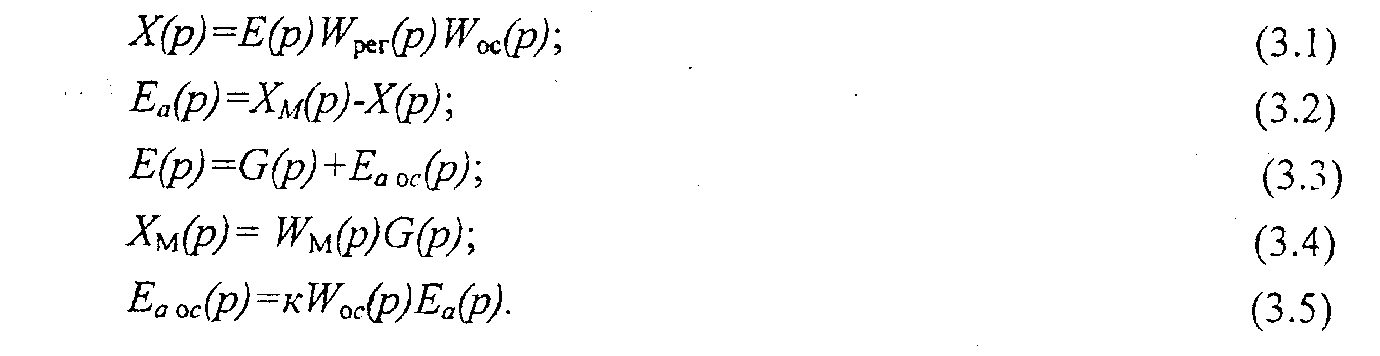
После исключения промежуточных переменных из системы уравнений (3.1) - (3.5) получаем передаточную функцию (ПФ) системы по задающему воздействию

откуда после перехода в частотную область имеем

В области частот, где

выполняется приближенное равенство
![]()
и передаточная функция замкнутой системы определяется желаемой передаточной функцией модели, несмотря на возможные изменения параметров основной системы.
7. Градиентный метод синтеза снс с эталонной моделью
Рассмотрим градиентный метод синтеза на следующем примере. Пусть система управления представляет собой апериодическое звено 1-го порядка, охваченное жесткой обратной связью.

В качестве допущения примем, что в этой системе происходит достаточно медленное изменение параметрических возмущений по сравнению со скоростью протекания ее переходных процессов.
Для описания системы воспользуемся передаточной функцией, в которой переменные во времени и перестраиваемые коэффициенты входят в качестве параметров. Пусть a0 изменяется во времени a0= a0(t).
Для компенсации изменения переменного во времени коэффициента a0= a0(t) cделаем перестраиваемым к0= к0(t).

В качестве модели выберем звено следующего вида:

где а0, к0 - некоторые желаемые значения коэффициентов а0, к0;
хм(t)- выходная координата модели.
Критерием (мерой) близости движения реальной системы и модели выберем следующую функцию:
![]() (3.9)
(3.9)
где e(t)=хм(t)-х(t).
Величина J зависит от входного воздействия g(t), начального значения рассогласования, входных координат системы, а также изменяющегося коэффициента а0 и перестраиваемого к0.
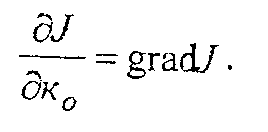
Сущность метода градиента состоит в организации такого алгоритма перестройки к0, чтобы в каждый момент времени его изменение было направлено на уменьшение критерия качества J, который является функцией от к0. Для реализации метода необходимо знать градиент изменения величины J по к0, т.е.
Алгоритм изменения к0 в методе градиента строится на основе следующей формулы:

где - коэффициент усиления контура адаптации.
Зная вид критерия качества (3.9), формулу (3.10) можно переписать в следующем виде:

Поскольку параметры модели не зависят от времени, то

Для организации контура самонастройки по алгоритму (3.11) в каждый момент времени необходимо знать величину

которая носит название функции чувствительности выходной величины х по коэффициенту к0. В силу коммутативности операций преобразования Лапласа и дифференцирования по параметру будем иметь

т.к.

Или, по-другому:

т.к.

Принимая во внимание, что Х(р)=W(р, а0 ,к0)G(р), получим

Из полученных выражений (3.13) и (3.14) можно видеть, что функция чувствительности U0(t) зависит от времени t, перестраиваемого коэффициента к0 и изменяющегося а0. Однако определение U0(t) по полученным формулам затруднительно из-за неопределенности коэффициентов a0 и к0. В этом случае применяется метод «замороженных коэффициентов», в соответствии с которым коэффициенты a0 и к0 принимаются близкими к коэффициентам a00 и к00 модели. Если заранее предположить, что эта задача успешно выполняется, то ПФ реальной системы W(р, а0, к0) можно заменить на ПФ модели Wм(р, а00, к00). Таким образом можно получить некоторую приближенную функцию чувствительности

Подставим далее (3.12) и (3.15) в (3.11):

откуда получим
к0=(2/p) E(p)W(p)X(p) (3.17).
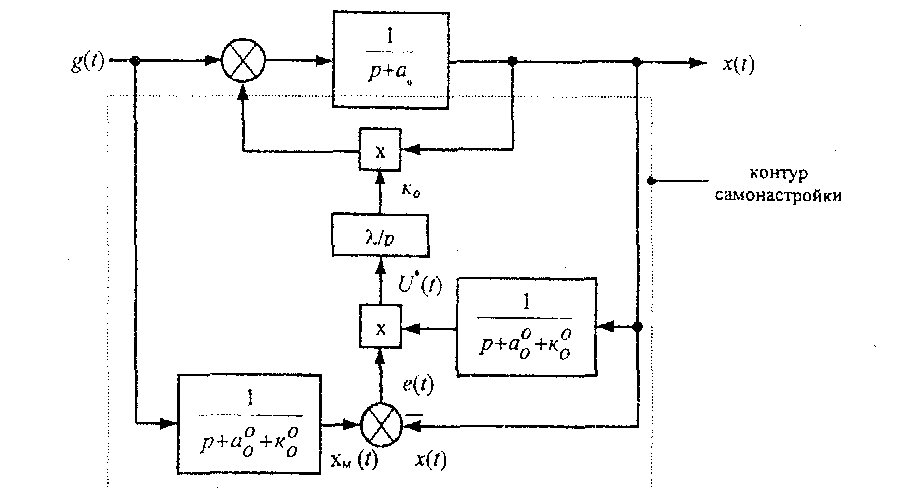
Полученная формула (3.17) позволяет определить значения перестраиваемого коэффициента к0 в зависимости от значения выходной координаты, ошибки управления и ПФ модели.
Структурная схема СНС с эталонной моделью, синтезированная по методу градиента, представлена на рисунке.