

4.1. Электроконтактные преобразователи.
Электроконтактный прибор в общем виде состоит из электроконтактного преобразователя усилителя командных сигналов, светофорной устройства, блока питания и часто дополняется механический микромером со шкалой.
Электроконтактный преобразователь — это устройство, преобразующее линейное перемещение в электрически дискретный сигнал-команду путем замывания или размыкания электрических контактов. Электрический сигнал-команду преобразователя усиливают специальным усилителем, а коммутация внешних выходных электрических цепей осуществляется обычно с помощью электромагнитный реле. Все это вместе образует блок усилителя командных сигналов. Светофорное устройство служит для информации о командах. Блок питания предназначен для поддержания параметров питания на заданном уровне.
4.1.1. Принципы построения электроконтактных преобразователей.
По назначению преобразователи разделяются на предельные, предназначенные для контроля размера детали, и амплитудные, предназначенные для контроля отклонений от правильной геометрической формы.
В предельных преобразователях (рис.39, а) каждому значению размера детали соответствует определенное положение подвижного контакта относительно неподвижных (настраиваемых) контактов.
В амплитудных преобразователях (рис. 39, б) где надо исключить влияние самого размера на результаты контроля отклонений детали от правильной геометрической формы, контакт выполнен «плавающим».
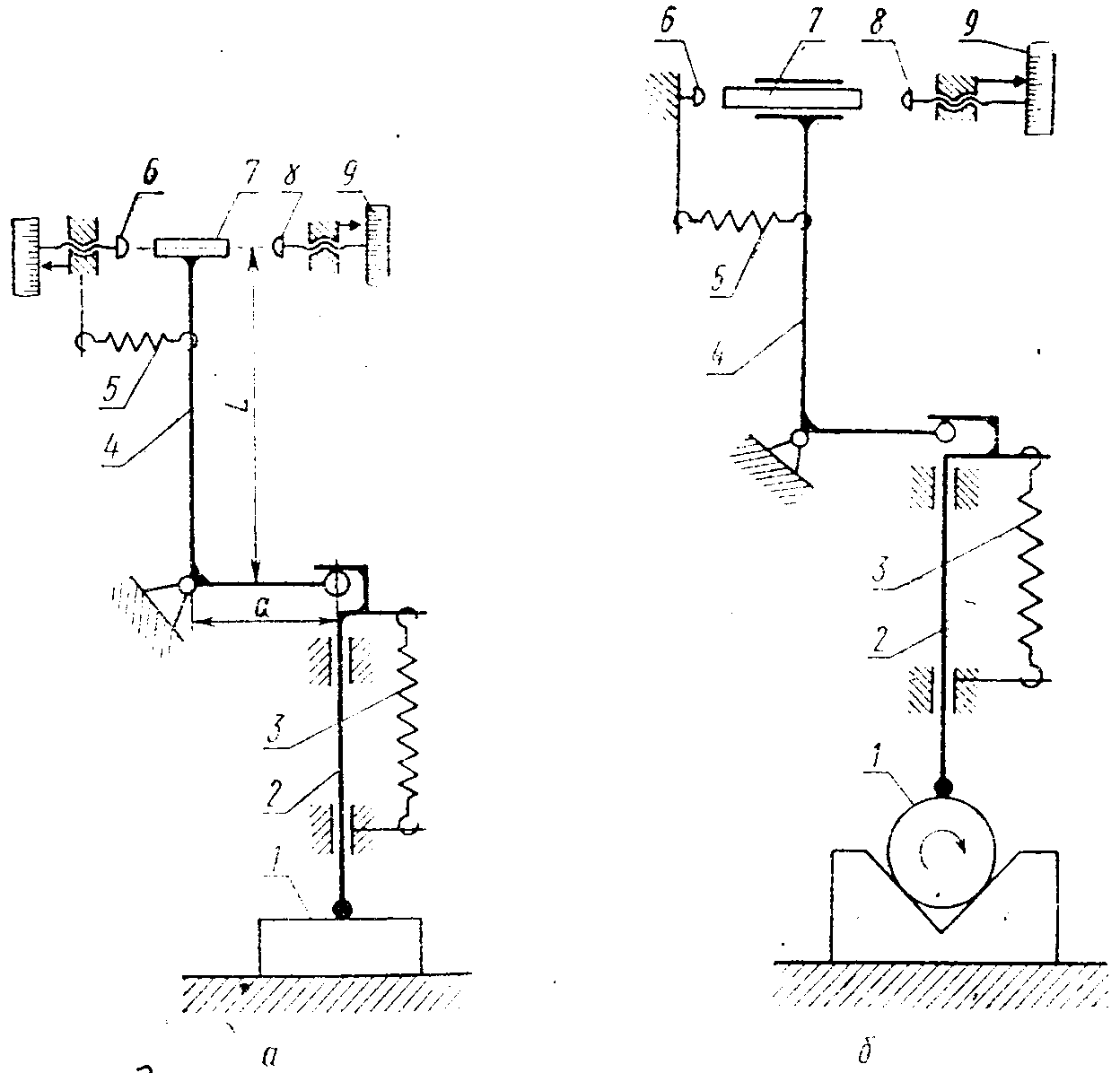
Рис. 39. Принципиальные схемы электроконтактных преобразователей:
1 – контролируемая деталь; 2 – измерительный стержень; 3 – пружина, создающие измерительное усилие; 4 – рычаг; 5 – пружина, создающая контактное усилие; 6, 8 – неподвижные контакты; 7 – подвижный контакт; 9 – барабан настроечного винта со шкалой.
Предельные преобразователи в зависимости от числа пар контактов делятся на одно-, двух и многопредельные.
С
точки зрения передаточного отношения
преобразователи можно разделить на
безрычажные, у которых передаточное
отношение равно 1, и рычажные (рис. 39,а)
— с передаточным отношением
![]() .
У безрычажных преобразователей износ
электрических контактов войдет полностью
в результаты контроля. Рычажный
преобразователь менее чувствителен к
износу контактов.
.
У безрычажных преобразователей износ
электрических контактов войдет полностью
в результаты контроля. Рычажный
преобразователь менее чувствителен к
износу контактов.
Вместе с тем значительное увеличение передаточного отношения приводит к повышению инерционности преобразователя и увеличению измерительного усилия.
В существующих рычажных электроконтактных преобразователях передаточное отношение принимается меньше 10. В большинстве случаев К=5. При выборе передаточного отношения необходимо также учитывать требуемую цену деления барабана настроечного винта. Цена деления барабана i определяется относительно перемещения измерительного стержня.
Для схемы рис. 39, а
![]() (5)
(5)
где t, n — шаг винта и число делений барабана соответственно.
Точность и стабильность работы преобразователя в значительной степени определяются факторами:
а) механическое повреждение контактов;
б) физическое разрушение контактов, или эрозия;
в) химическое разрушение контактов или коррозия.
Механическое повреждение контактов в результате их соударений зависит от твердости материала контактов и от контактного усилия.
Эрозия — это разрушение контактов, вызванное электрическим током в процессе их замыкания и размыкания.
Критерием коррозионной стойкости контактов обычно служит их переходное сопротивление, изменяющееся во времени или с увеличением числа срабатываний.
Условия работы контактов преобразователя улучшает герметизация корпуса преобразователя.
Наибольшее распространение получили рычажные преобразователи, точность которых выше точности безрычажных.