

17.Модельні системи управління
Системи управління типу D-системи, до якої належить модельний блок, який містить у собі певну сукупність знань щодо об’єкта, що використовується під час управління ним, називають модельними системами управління. Структурну схему такої системи управління представлено на рис. 3.7.
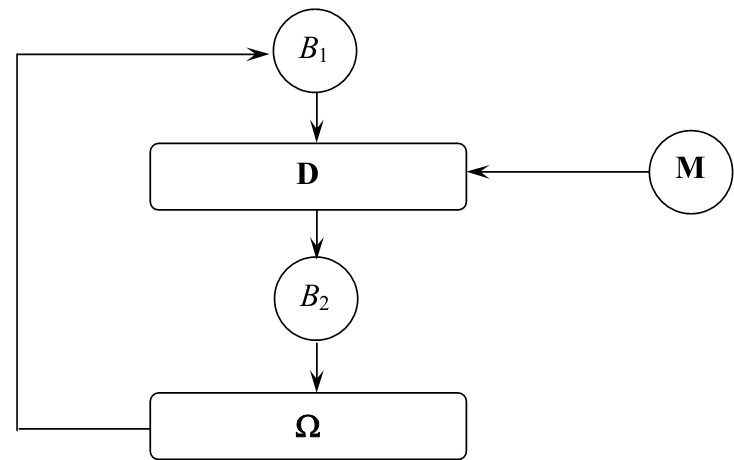
Доцільність виокремлення блоку М з блоку D ґрунтується на тому, що у переважній більшості випадків представлення знань про об’єкт у моделі є більш комплексним за їхнє представлення в алгоритмі. Це дає змогу істотно спростити опис і функціонування системи управління. Зауважимо, що зберігання знань у моделях називають декларативним представленням знань. Зберігання знань в описі алгоритмів називають процедурним представленням знань. Пошук знань, внесення змін інформації у моделях є значно простішим, ніж писати нові процедури для блоку D. Крім цього, у випадку перенасичення процедурами блоку D потрібні незначні затрати зусиль для введення нової інформації у модель, щоб вона стала придатною для адаптації до нового об’єкта управління. Модельні системи управління називають D-M- системами.
18.Семіотичні системи управління
У D-M-системах управління передбачено, що у процесі управління інформація блоку М є незмінною, тобто апріорна система знань щодо об’єкта має властивість повноти і достовірності. У реальній ситуації блок М змінюється у процесі роботи системи управління. Інформація блоку М неперервно поновлюється, уточнюється. Для відображення цього у структурну схему модельної системи управління вводять блок, який називають інтерпретатором. Його призначення – інтерпретація реакції – відповіді середовища та об’єкта управління на вплив системи управління і процесів, що відбуваються в об’єкті Ω і моделі M. Це здійснюється з допомогою спеціальних процедур, які реалізуються в інтерпретаторі. Структурну схему семіотичної системи управління подано на рис:
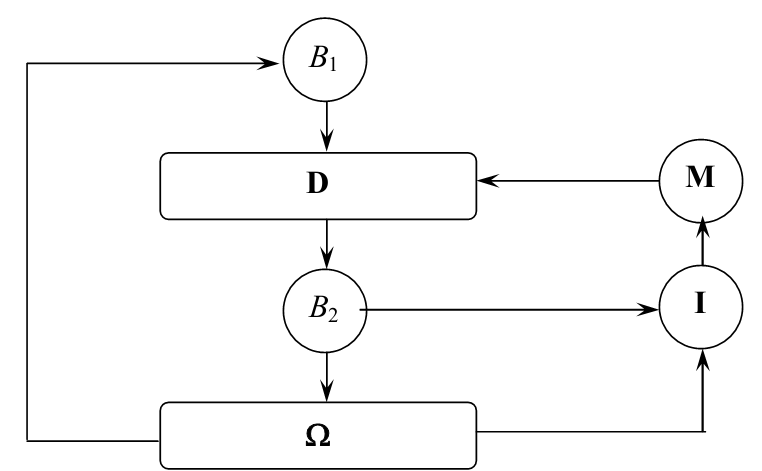
Головна роль у таких системах переходить від блоку D до сукупності блоків М і І. За необхідності під блоками М і І можна розуміти цілу ієрархічну систему інтерпретаторів і моделей, кожна з яких працює зі своєю групою процедур із D. Системи ситуаційного управління використовують семіотичні системи, описані у певній спеціальній модифікації.
Етапи управління
Управління складною системою налічує такі етапи:
Формування цілей управління. У деяких випадках для розв’язання практичних задач можна дещо спростити представлення цілей: наприклад, представити їх за допомогою деяких цільових змінних, які визначають суб’єкт управління.
Наприклад,
нехай
 –
вимірюючi
виходи об’єкта управління, які визначають
його стан:
–
вимірюючi
виходи об’єкта управління, які визначають
його стан:

А
 – вимірюючi
входи об’єкта, які характеризують стан
середовища:
– вимірюючi
входи об’єкта, які характеризують стан
середовища:
Позначимо
 – цільові змінні
– цільові змінні
 ,
визначені суб’єктом управління. Між
ними і станом об’єкта є строго визначений
і відомий зв'язок:
,
визначені суб’єктом управління. Між
ними і станом об’єкта є строго визначений
і відомий зв'язок:

Розрізняють 3 види цілей:
Ціль-стабілізація (прирівняти) – полягає у підтримуванні певних виходів об’єкта на заданому рівні:

Де
 – необхідний суб’єктові рівень цільової
змінної
– необхідний суб’єктові рівень цільової
змінної
 при стані
при стані
 середовища і потреб
середовища і потреб

Ціль-обмеження (обмежити) вимагає виконання нерівності:

Де
 – верхня межа зміни цільової змінної
– верхня межа зміни цільової змінної
 ,
яка визначається суб’єктом в ситуації
<
,
яка визначається суб’єктом в ситуації
< >.
>.
Екстремальна ціль (екстремізувати) зводиться до підтримки в екстремальному стані
 цільових
змінних:
цільових
змінних:

Отже,
ціль
 -
це набір вимог зазначеного виду і
однозначно визначається числами
-
це набір вимог зазначеного виду і
однозначно визначається числами
 i
i

Множина
цілей
 у цьому випадку визначається шляхом
задання зон зміни параметрів:
у цьому випадку визначається шляхом
задання зон зміни параметрів:



Визначення об’єкта управління. Цей етап пов'язаний з виокремленням тієї частини середовища суб’єкта, стан якого він може змінити і сам впливатиме на свої потреби. Загалом це і буде об’єктом управління.
У деяких випадках, коли межі об’єкта є очевидними, проблеми виокремлення об’єкта з середовища не виникає. Проте в інших випадках зв’язки об’єкта з середовищем настільки сильні і різноманітні, що інколи важко зрозуміти де закінчується об’єкт і розпочинається середовище. Власне цей випадок змушує вводити спеціальний етап – визначення управління.
Розглянемо головні міркування щодо вибору об’єкта управління. Очевидно, що об’єкт повинен бути у певному розумінні мінімальним, тобто мати найменший об’єм. Про це необхідно турбуватися хоча б для того, щоби мінімізувати трудомісткість вивчення цього об’єкта в наступних етапах під час синтезу його моделі.
Однак
у цьому випадку суттєвим обмеженням
тут є досягнення множини цілей управління
в рамках виокремленого для цього ресурсу
R.
Це означає, що для будь якого стану
середовища X
існує управління
 ,
за допомогою якого можна досягнути
будь-якої цілі
,
за допомогою якого можна досягнути
будь-якої цілі
 .
.
Введемо предикат:
 ,
,
Який
приймає значення «1», якщо цілі управління
 в об’єкті
в об’єкті
 досягнуто, тобто
досягнуто, тобто
 і значення «0» - у протилежному випадку.
Тоді обмеження на вибір об’єкта
матиме вигляд:
і значення «0» - у протилежному випадку.
Тоді обмеження на вибір об’єкта
матиме вигляд:

Це обмеження повязує стан середовища Х, ціль і об’єкт .
Введемо
об’єм об’єкта
у вигляді
 .
Тоді задача визначення зводиться до
наступної оптимізаційної задачі:
.
Тоді задача визначення зводиться до
наступної оптимізаційної задачі:

 (1)
(1)
А
 – множина станів середовища.
– множина станів середовища.
Наступні
3 етапи управління пов’язані з розв’язком
задачі створення його моделі, яка є
необхідною для синтезу управління U.
Тільки за допомогою моделі об’єкта
можна побудувати управління
 ,
яке переводить об’єкт в необхідний
(цільовий) стан
,
яке переводить об’єкт в необхідний
(цільовий) стан
 .
.
Модель
F,
яка зв’язує входи X
i
U
з виходом Y,
визначається структурою STі
параметрами
 тобто
представляється у вигляді :
тобто
представляється у вигляді :

Структурний синтез моделі. На цьому етапі визначається структура ST, тобто модель об’єкта з точністю до значень її параметрів С.
Етап труктурного синтезу – це насамперед:
- визначення зовнішньої структури моделі,
- декомпозиція моделі,
- визначення внутрішньої структури елементів моделі.
Синтез зовнішньої структури моделі зводиться до змістового визначення її входів X i U,а також виходу Y без урахування внутрішньої структури обєкта, тобто обєкт розглядають як чорну скриньку з n+g входами і m виходами.
Декомпозиція моделі полягає в тому, щоби, використовуючи апріорні відомості щодо структури об’єкта, спростити задачу синтезу структури моделі.
Синтез внутрішньої структури моделі зводиться до визначення виду ST оператора F моделі об’єкта чи її елементів з точністю до її параметра C . Це означає, що параметри стають змінними моделі, тобто:
Y = F(X,Y.C), (2)
де F – оператор перетворення зі структурою ST, параметри якого для зручності внесено у змінні C .
Представлення оператора перетворення моделі у вигляді (2) можна назвати параметризацією моделі, що є еквівалентом задання її структури.
Ідентифікація параметрів моделі об’єкта. Цей етап пов’язаний з визначенням числових значень параметрів в режимі нормального функціонування об’єкта, тобто без організації спеціальних експериментів з ним.
Планування експерименту. Тут головним є синтез плану експерименту, який дає змогу з максимальною ефективністю визначити шукані параметри моделі об’єкта управління. Для статичного об’єкта цей план U являє собою набір станів управляючого виходу об’єкта
 ,
а
для динамічного – план-функцію
,
а
для динамічного – план-функцію
 ,
,
тобто програму зміни в часі входу об’єкта.
Експеримент
над об’єктом дає змогу визначити реакцію
об’єкта
на цей вплив. У статичному випадку ця
реакція має
вигляд:

а
в динамічному –

Отримана внаслідок цього інформація і є вихідною щодо визначення параметрів C моделі F :Y = F(U,C).
План експерименту визначається трьома чинниками:
а) структурою ST моделі F;
б) ресурсом планування R, утвореним засобами, виділеними на експеримент (часовими, матеріальними, енергетичними), а також областю планування, яка визначає межі зміни входів об’єкта в процесі планування;
в)
критерієм планування k,
який визначає ефективність плану
U.
Задають його зазвичай на дисперсійній
матриці Dc
шуканих
параметрів
C
моделі. Синтез оптимального плану
здійснюється
розв’язанням
такої оптимізаційної задачі:
 ,
,
Де
 –
оптимальний план.
–
оптимальний план.
6. Синтез управління. На цьому етапі приймається рішення про те, яким повинно бути управління U*, щоби досягти заданої цілі управління z* в об’єкті. Це рішення спирається на наявну модель об’єкта F, задану ціль z*, отриману інформацію щодо стану середовища X і виділений ресурс управління R, що є обмеженням, накладеним на управління U, яке також пов’язане зі специфікою об’єкта і можливостями системи управління.
7. Реалізація управління або відпрацювання в об’єкті оптимального рішення, одержаного на попередньому етапі. Зреалізувавши управління і переконавшись, що цілі управління не досягнуто, необхідно повернутись до одного з попередніх етапів. Навіть у кращому випадку, коли поставленої цілі досягнуто, необхідність звертання до попереднього стану спричинено зміною стану середовища x чи зміною цілі управління z* .
8. Адаптація. Час від часу необхідне корегування структури моделі, тобто приведення її у відповідність з новою інформацією. Далі корегування може торкнутись самого об’єкта, точніше, межі поділу об’єкта і середовища, що є необхідним при значній зміні (еволюції) об’єкта і середовища, в якому він перебуває. У цьому випадку корегування узаконить нові взаємовідносини нового об’єкта із середовищем. І, нарешті, створена система управління з певних причин може не реалізувати всю множину цілей управління, в результаті якої споживач дізнається, які ж цілі зазначена система управління може реалізувати в об’єкті . Це і є адаптація цілей.