15.Прості системи управління
На рисунку показано структурну схему систем управління без зворотного зв’язку, які називають розімкнутими системами. Такі системи реалізують процедуру управління, закладену у них. Їх не цікавлять наслідки вироблених і переданих об’єктові рішень. Прикладом таких систем можуть бути автомати, команди на виконання дій у яких передаються від елементів, у які закладено відповідні процедури (верстати з програмним управлінням, ігрові автомати тощо).
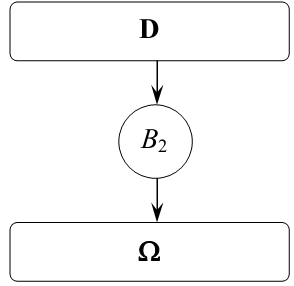
Моделлю розімкнутої системи дискретного типу є автономний автомат з фіксованою скінченною множиною внутрішніх станів Y={y1…yn} зміна яких відбувається у дискретні такти часу t. Робота цього автомату визначається функцією переходу yt+1=f(yt). Кожному стану автомата однозначно відповідає вихідний сигнал, що надходить на передавач B2. Особливістю такого автомата є те, що на його вихід надходить циклічно повторювана послідовність сигналів.
Розімкнуту систему може представляти також імовірнісний автономний автомат, який замість функції переходу має фіксований розподіл ймовірностей зміни станів. Такий автомат вважають марковським джерелом сигналів. Послідовність сигналів його виходу за умови фіксованого початкового стану завжди відзначається заданими ймовірностями виникнення вихідних сигналів. У детермінованій системі механізм породження рішень D реалізує жорсткий алгоритм, а в імовірнісній системі – роцедуру, що з певною імовірністю передбачає на кожному кроці її роботу. На рисунку зображено структурну схему управління зі зворотним зв’язком.
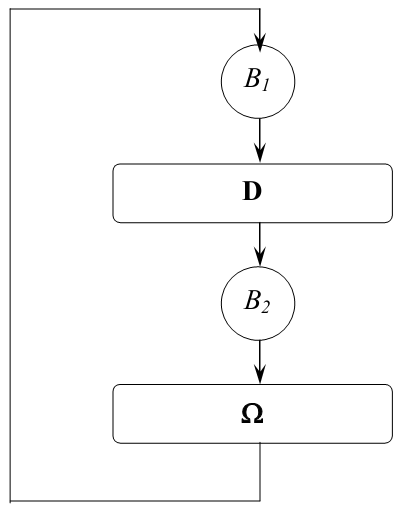
У такій системі механізм прийняття рішень D реалізується не тільки закладеними у нього процедурами, але й спостереженням за ситуаціями, виникнення яких всередині системи визначається зворотними зв’язками, що надходять від об’єкта і середовища.
У
системі дискретного типу формальною
моделлю механізму D є алгоритм, який
визначається детермінованим чи
імовірнісним автоматом з активними
входами, який у загальному випадку
задається множиною входів X={x1,…,
xm},
множиною станів Y={y1,…,
yn}
і множиною виходів Z={z1,…,
zk}.
Крім цього цей автомат визначено функцією
переходів
 і функцією виходів
і функцією виходів

В імовірнісному автоматі замість названих функцій використано умовні імовірнісні розподіли зміни станів автомата від значень вхідного сигналу та імовірності розподілу значень вихідних сигналів. Опис конкретних ситуацій збігається з визначенням кількісних характеристик сигналів на входах автоматів.
Характерна особливість розглянутих систем управління, у яких механізм прийняття рішень ми позначили через D (в подальшому – D-системи), полягає у тому, що з появою на вході інформації щодо спостереження певної ситуації з множини можливих ситуацій наперед визначено, як будуть виконуватися процедури, закладені у механізмі D.
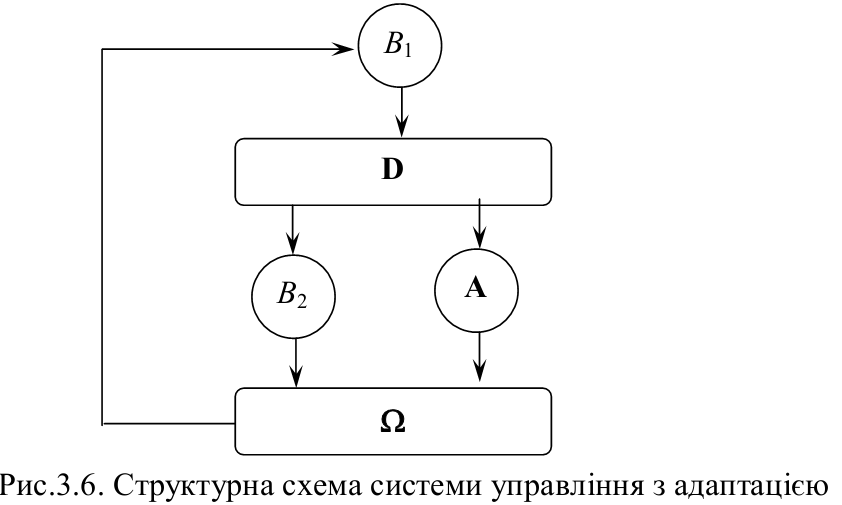
16.Системи управління з адаптацією
Складнішими системами управління порівняно з D-системами є системи, які здатні аналізувати ситуації, що спостерігаються, і реагувати на результати цього аналізу. Такі
системи називають системами управління з адаптацією. Структурну схему системи управління з адаптацією наведено на рис. 3.6. У цій системі блок А (адаптер) забезпечує вибір певної сукупності процедур, які реалізуються у блоці прийняття рішень D на базі аналізу ситуацій. Блок А виокремлено з блоку D з двох міркувань. По-перше, блок А працює з меншою інтенсивністю порівняно з іншими блоками системи управління. По-друге, побудувати складну систему як композицію простіших систем значно простіше за побудову єдиної складної системи.
Системи управління з адаптацією називають D-A-системами.