

Линейные упругие системы и их свойства
1. Обобщенные силы и перемещения.
2. Упругие системы.
3. Линейные системы.
4. Матрицы жесткости и податливости.
5. Принцип суперпозиции.
6. Простейшая линейная упругая система. Потенциальная энергия.
7. Теоремы взаимности работ и перемещений.
8. Потенциальная энергия линейной упругой системы, загруженной произвольным числом обобщенных сил.
9. Теорема Лагранжа и теорема Кастильяно.
10. Удельная работа напряжений.
11. Потенциальная энергия упругого тела.
12. Соотношения между напряжениями и деформациями и потенциальная энергия линейного упругого тела.
Линейные упругие системы и их свойства .
1. Обобщенные силы и перемещения.
Обобщенными перемещениями называют любые величины, характеризующие изменение геометрии деформируемой механической
системы.
Обобщенной силой, соответствующей Qi данному обобщенному перемещению qi, называют фактор, определяющий элементарную работу dA, совершаемую над механической системой на приращении обобщенного перемещения dqi:
dW = Qi dqi (1)
или
W = Qi qi, (1а)
если W – возможная (виртуальная) работа, совершаемая на возможном (виртуальном)перемещении q i.
Пример. Для балки, изображенной на рис.1, в качестве обобщенных перемещений выберем вертикальные перемещения точек А и В и угол поворота сечения С:
q1 = vA, q2 = vB , q3 = C ,
тогда соответствующими обобщенными силами будут вертикальные силы PА и PВ, приложенные в точках А и В, и момент пары сил Мс, приложенной в сечении С. Эти обобщенные силы могут иметь любые вещественные (в том числе и нулевые) значения.
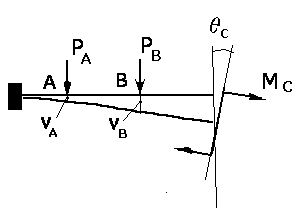
Рис.1 Обобщенные силы, действующие на балку и соответствующие им обобщенные перемещения.
2. Упругие системы.
Деформируемая система называется упругой (идеально упругой), если действующие на нее обобщенные силы связаны с обобщенными перемещениями взаимно однозначными зависимостями.
Обобщенные перемещения упругой системы зависят только от текущих значений обобщенных сил и не зависят от последовательности приложения и закона изменения их во времени.
Обобщенные перемещения упругой системы принято отсчитывать от исходного ненагруженного состояния. После полной разгрузки обобщенные перемещения возвращаются к начальным нулевым значениям: упругие деформации при полной разгрузке системы исчезают.
3. Линейные системы.
Деформируемая система называется линейной упругой (линейно-упругой), если обобщенные перемещения и силы связаны линейными зависимостями.
Линейную зависимость между силами и перемещениями принято называть законом Гука (обобщенным законом Гука).
Линейные упругие системы следуют закону Гука.
Пусть состояние линейно упругой деформируемой системы характеризуется n обобщенными перемещениями qi, которым соответствуют обобщенные силы Qi , (i=1,2,...,n).
Линейная зависимость каждого обобщенного перемещения от всех обобщенных сил выражается соотношениями:

![]() (2)
(2)
или, то же самое:
![]() ,
i,j = 1,2,..,n. (2а)
,
i,j = 1,2,..,n. (2а)
Постоянные коэффициенты аi,j называются коэффициентами податливости упругой системы.
Чем больше коэффициент податливости ai,j, тем большее перемещение qi, вызывается обобщенной силой Qj.
Нагрузим упругую линейную систему силой Qj =1, полагая, что все остальные силы равны нулю. Тогда из(2) следует:
qi = aij.
Коэффициент податливости aij равен i-тому обобщенному перемещению qi, вызванному единичной j-той обобщенной силой Qj =1.
4. Матрицы жесткости и податливости.
Уравнения (2) можно переписать в матричном виде:
![]() , (2б)
, (2б)
где (Q) и (q) – n-мерные векторы, представленные в форме матриц-столбцов, составленных из обобщенных сил и обобщенных перемещений:
![]()
 ,
,  ,
,
![]() –
квадратная
матрица размерами nxn,
составленная
из коэффициентов податливости
линейной упругой
системы. Ее называют матрицей податливости.
–
квадратная
матрица размерами nxn,
составленная
из коэффициентов податливости
линейной упругой
системы. Ее называют матрицей податливости.
Решим систему уравнений (2) относительно (Q), обобщенные силы выразятся линейными функциями перемещений:
 (3)
(3)
или в сокращенной записи:
![]() (3-a)
(3-a)
Матрица [c], обратная матрице [a], называется матрицей жесткости, а ее коэффициенты aij, коэффициентами жесткости упругой системы.
Матрицы жесткости и податливости взаимно обратные:
[c]=[a]-1, [a]=[c]-1. (4)
По аналогии с коэффициентами податливости (см. п.3) можно из (3) установить, что
коэффициент жесткости aij равен i-той обобщенной силе Qj, вызывающей единичное j-тое обобщенное перемещение qj .
5. Принцип суперпозиции.
Пусть на линейную упругую систему действуют две системы сил (Q)A и (Q)B. Обобщенные перемещения, вызванные каждой из этих систем сил, в соответствии с формулой (2а) будут равны:
(q)A=(a)*(Q)A для системы сил (Q)A,
(q)B=(a)*(Q) B для системы сил (Q)B .
Если обе системы сил действуют одновременно, то
(q)A+B = (a)*((Q)A + (Q) B) = (a)*(Q)A + (a)*(Q) B = (q)A + (q)B .
Следовательно, для линейной упругой системы справедливо следующее правило:
Результат одновременного действия двух систем сил равен сумме результатов действий каждой из этих систем.
Это положение называют принципом суперпозиции, а ревнители чистого русского языка называют его принципом независимости действия сил и законом сложения.