

3. Физические уравнения.
3.1. Общие соотношения.
3.2. Удельная работа напряжений.
3.3. Потенциальная энергия.
4. Закон Гука для изотропного упругого тела.
4.1. Линейное напряженное состояние.
4.2. Закон Гука для произвольного напряженного состояния в главных осях тензора напряжений.
4.3. Закон Гука при произвольном напряженном состоянии в произвольных координатны осях.
4.4. Относительное изменение объема.
4.5. Обратные соотношения. Закон Гука в форме Ламе.
4.6. Соотношение между девиаторами и интенсивностями напряжений и деформаций.
4.7. Характеристики упругих свойств материалов.
4.8. Потенциальная энергия изотропного материала.
4.9. Заключение по главе. Линейно- упругая модель и реальные материалы.
4.10. Пример.
3. Физические уравнения.
3.1. Общие соотношения.
Физические уравнения в механике сплошных сред связывают параметры, описывающие напряженное состояние с переменными, описывающими движение или деформирование материала. В теории упругости физические соотношения связывают тензор напряжений с тензором деформаций . В линейной теории упругости, которая здесь излагается, предполагается, что эта связь линейна.
В общем случае линейная зависимость между тензорами напряжений и деформаций имеет вид линейных уравнений, связывающих компоненты этих тензоров:
![]() (1)
(1)
или, то же самое:
() = [С]() , (1-м)
где () = (x,y,z,xy,yz,zx)T – матрица-столбец, составленная из компонент тензора напряжений (шестимерная по числу независимых компонент),
() = (x,y,z,xy,yz,zx)T – матрица-столбец, составленная из компонент деформаций.
[C] – матрица (6х6) упругих коэффициентов жесткости.
Обратив уравнения (1), получим линейные соотношения, выражающие деформации через напряжения:
() = [А] () , (2)
где [А] – матрица упругих коэффициентов податливости, обратная матрице [С]:
[А] = [С]-1, [С] = [А]-1.
3.2. Удельная работа напряжений.
В механике принято работу, которую совершают внешние силы над механической системой считать положительной (в классической термодинамике обычно принимается обратное правило знаков).
Рассмотрим элементарный объем V выделенный из тела в нагруженном состоянии, ограниченный поверхностью А. (объем обозначен V, а не dV, поскольку по нему предстоит интегрировать). Выделим элемент поверхности dA, с нормалью , на который действует напряжение S (рис.1).
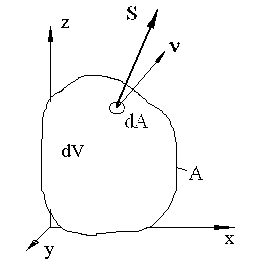
Рис.1. Элементарный объем.
Работа, которую совершат напряжения S на приращениях перемещений du определится интегралом:
dW
=
![]() =
=
![]() (Sdu)dA,
(Sdu)dA,
где Sx, Sy, Sz, dux, duy, duz – проекции векторов S и du на координатные оси.
Выразим проекции вектора S через напряжения по формулам (1.6) и преобразуем интеграл по поверхности в интеграл по объему. Тогда, учитывая уравнения равновесия (1.30), получим:
dW=![]() (xdx
+ ydy
+ ... + zxdzx
) dv
(xdx
+ ydy
+ ... + zxdzx
) dv
Поскольку объем V бесконечно малый,
dW
= (xdx
+ ydy
+ ... + zxdzx
)
![]() = V
(xdx
+ ydy
+ ... + zxdzx
)
= V
(xdx
+ ydy
+ ... + zxdzx
)
Работа, приходящаяся на единицу объема:
dw
=
![]() = xdx
+ ydy
+ ... + zxdzx
= d (3)
= xdx
+ ydy
+ ... + zxdzx
= d (3)
Если компоненты деформаций ij принять за обобщенные перемещения, то компоненты напряжений ij c теми же индексами можно рассматривать как соответствующие им обобщенные силы, поскольку они совершают работу на приращениях dij.
Тензорная операция, обозначенная в зависимости (26) двумя точками, называется сверткой или двойным скалярным произведением тензоров. По определению ее результатом является скаляр, равный сумме произведений одноименных компонентов перемножаемых тензоров. Прямая проверка позволяет убедится в том, что свертка тензоров A и B равна первому инварианту (т.е. сумме элементов, стоящих на главной диагонали,) скалярного произведения этих тензоров:
:AB
=
![]() =
J1(AB)
= J1((A)Т.(B)) (4)
=
J1(AB)
= J1((A)Т.(B)) (4)
3.3. Потенциальная энергия.
В упругих механических системах работа, совершаемая внешними силами, накапливается в виде потенциальной энергии. Приращение потенциальной энергии единицы объема dП равно работе, совершаемой напряжениями (3):
dП = dw = xdx + ydy + ... + zxdzx (5)
или
dП = d . (6)
Приращение потенциальной энергии единицы объема, вызванное работой напряжений равно свертке тензора напряжений с тензором приращений деформаций.
Представим тензоры, входящие в (6) суммами их шаровых частей и девиаторов.
=
(0
I
D
)
, d
= (![]()
I
+ Dd)
.
I
+ Dd)
.
Учитывая, что свертка тензоров следует правилам обычного умножения, получим:
dП(0 I D) ( I + Dd) =
= 0 (I I) + 0 (I Dd) + (D I) + (D Dd) (7)
Легко проверяется, что свертка двух единичных тензоров (в первом слагаемом (7)) равна 3, а свертки единичных тензоров с девиаторами (во втором и третьем слагаемых) равны нулю. Поэтому в (7) остается только два слагаемых – первое и последнее:
dП = 0d + D Dd (8)
Потенциальная энергия является функцией обобщенных сил или функцией однозначно связанных с ними обобщенных перемещений. Следовательно, потенциальная энергия может быть представлена в виде функции компонент напряжений или в виде функции компонент деформаций
П = П(ij) или П = П(ij). (9)
Воспользовавшись вторым из этих представлений запишем полный дифференциал потенциальной энергии в виде:
dП
=
![]() . (10)
. (10)
Сравнивая (10) с (5), получим:
i,j
=
![]() . (11)
. (11)
Компоненты напряжений являются производными от потенциальной энергии по соответствующим компонентам деформаций.
Этот результат является прямым следствием теоремы Лагранжа - производная от потенциальной энергии по обобщенному перемещению равна той обобщенной силе, которая соответствует этому обобщенному перемещению. Заметим, что, как и теорема Лагранжа, зависимость (9) справедлива как для линейных, так и для нелинейных упругих систем.
В линейных упругих системах компоненты напряжений и деформаций связаны линейными зависимостями (1). Нетрудно показать, а еще проще проверить, что в этом случае потенциальная энергия упругой системы является однородной квадратичной функцией компонент деформаций:
П
=
![]() , i,j
= 1,2…6, (12)
, i,j
= 1,2…6, (12)
коэффициентами которой являются компоненты матрицы упругих коэффициентов жесткости [А] (см. (1)).
Можно представить потенциальную энергию упругого тела в виде функции компонент напряжений:
П
=
![]() , i,j
= 1,2…6. (13)
, i,j
= 1,2…6. (13)
В этом выражении коэффициентами квадратичной формы являются компоненты матрицы упругих коэффициентов жесткости [С], которая обратна матрице коэффициентов податливости (см.(3)).
Используя уравнения (1) или (2), выражения (12) или(13) можно привести к виду:
П
=
![]() =
=
![]() (), (14)
(), (14)
Потенциальная энергия единицы объема линейного упругого тела равна половине свертки тензоров напряжений и деформаций.
Как известно, вторая смешанная производная функции нескольких переменных не зависит от порядка дифференцирования. Дифференцируя выражение (10) сначала по i и j, а затем меняя порядок дифференцирования, получим:
Аi,j = Aj,i (13)
Коэффициенты матрицы [А] не меняются при перестановке индексов, матрица симметрична относительно главной диагонали. Аналогично устанавливается симметрия матрицы коэффициентов жесткости [С].
Матрицы упругих коэффициентов жесткости и податливости симметричны относительно главной диагонали.
Следовательно, из 36 коэффициентов у каждой из матриц А и С независимыми являются 21 коэффициент.