

Устройство червячной тали
Ручные червячные тали (рисунок 6.1) подвешиваются к потолочным балкам, треногам или другим устройствам с помощью крюка 5. Грузоподъемность ручных талей 0,5–5 т, высота подъема до 3 м. Тяговым органом в ручных талях является грузовая пластинчатая или овально-звеньевая цепь 1, охватывающая звездочку 3, жестко связанную с червячным колесом 4. Для увеличения КПД червячного зацепления и скорости подъема груза применяют червячную двухзаходную передачу, не являющуюся самотормозящей, поэтому на валу червяка 7 устанавливают дисковый или конический грузоопорный тормоз 2 с неразмыкающимися поверхностями трения. Вращение червяка осуществляется цепным колесом 6 с помощью тяговой сварной цепи 8. Для захвата груза служит крюковая подвеска 9, которая связана с грузовой цепью 1, концы которой закреплены к тали таким образом, чтобы образовать полиспаст, кратность іn = 2.
Работа червячной тали
Работу тали рассмотрим для трех периодов: период подъема груза; период, когда груз подвешен неподвижно; период опускания груза.
Период подъема груза. При подъеме груза червяк 1, червячное колесо 4 и грузовая звездочка 3 вращаются по направлению стрелок 1. Грузовой момент, имея постоянное направление, через червяк 7 прижимает конус 2 (или диски) (рисунки 6.1 и 6.2) тормоза к храповику 1 (рисунок 6.2) с внутренней конической поверхностью: при этом происходит стормаживание частей тормоза. Замкнутый тормоз, вращаясь (стрелка 1) вместе с валом червяка, не встречает препятствий со стороны собачки 4 (рисунок 6.2), т.к. она скользит по скошенным поверхностям зубьев храпового колеса (1).
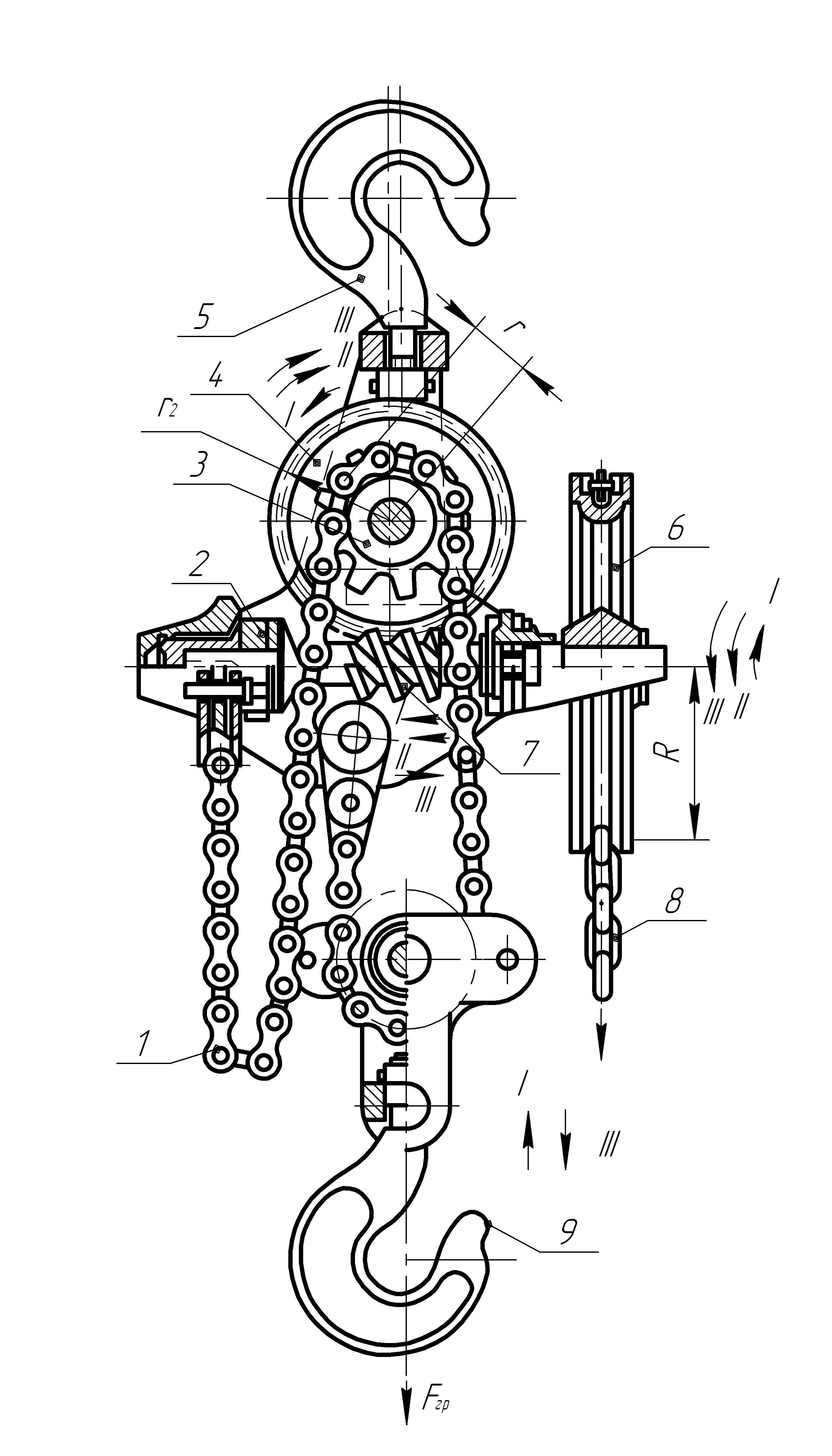
Рисунок 6.1 — Ручная червячная таль; подъём – I; стопор – II; спуск – III
1 — цепь; 2 — конус; 3 — грузовая звездочка; 4 — червячное колесо; 5 — крюк;
6 — тяговая звездочка; 7 — червяк; 8 — тяговая цепь; 9 — крюковая подвеска
Период
удержания груза.
Как только прекращается вращение тяговой
звездочки 6
(рисунок 6.1), вся система стремится в
обратном направлении (стрелки ІІ) под
действием силы тяжести груза Fгр.
Груз стремится опускаться. Но грузовой
момент (стрелка ІІ)
продолжает
удерживать тормоз в замкнутом положении.
Т.к. при этом собачка 4
(рисунок
6.2) заскакивает в гнездо между зубьями
храпового колеса І, она будет препятствовать
обратному вращению системы и груз не
сможет опускаться, оставаясь в подвешенном
состоянии. Относительное вращение между
конусом 2
(или диском 5)
и неподвижным храповым колесом І (или
6)
будет отсутствовать, т.к. момент тормоза
Тт,
стремящейся удержать груз, больше
момента статического от груза Т![]() ,
стремящегося опустить груз, в Кт
раз, где Кт
= 1,2–1,3 — запас
торможения
для тормозов осевого действия. Разомкнуть
этот тормоз нельзя, поэтому для опускания
груза необходимо затрачивать энергию
на преодоление запаса тормозного
момента.
,
стремящегося опустить груз, в Кт
раз, где Кт
= 1,2–1,3 — запас
торможения
для тормозов осевого действия. Разомкнуть
этот тормоз нельзя, поэтому для опускания
груза необходимо затрачивать энергию
на преодоление запаса тормозного
момента.
Период опускания груза. Прикладывая определенное усилие F к тяговой цепи 8 (рисунок 6.1), вращаем тяговую звездочку 6, червяк 7, червячное колесо 4, грузовую звездочку 3 в направлении, обратном подъему (стрелки ІІІ). Сбегающая ветвь грузовой цепи І, которая находится в зацеплении с грузовой звездочкой 3, опускается вместе с крюковой подвеской 9. Происходит опускание груза.
Усилие F, прикладываемое к тяговой цепи 8, связано с преодолением запаса торможения. Т.е. при опускании груза необходимо преодолеть трение между вращающимся конусом 2 (или диском 5) (рисунок 6.2), с одной стороны, и неподвижным колесом І (или 6) — с другой. Храповое колесо І (или 6) неподвижно, т.к. его удерживает собачка 4. Обычно усилие F для опускания груза мало, т.к. коэффициент запаса торможения Кт = 1,2–1,3. Такой малый запас торможения объясняется тем, что в отличие от колодочных и ленточных тормозов, где Кт = 1,5–2,5, данный конусный или дисковый тормоз является автоматическим. Это означает, что по мере увеличения грузоподъемности Q автоматически во столько же раз увеличивается осевое усилие червяка, обеспечивающее прижатие конуса 2 (или диска 5) (рисунок 6.2) к храповому колесу І (или 6) и поэтому во столько раз увеличивается момент тормоза, из-за чего груз никогда не падает.
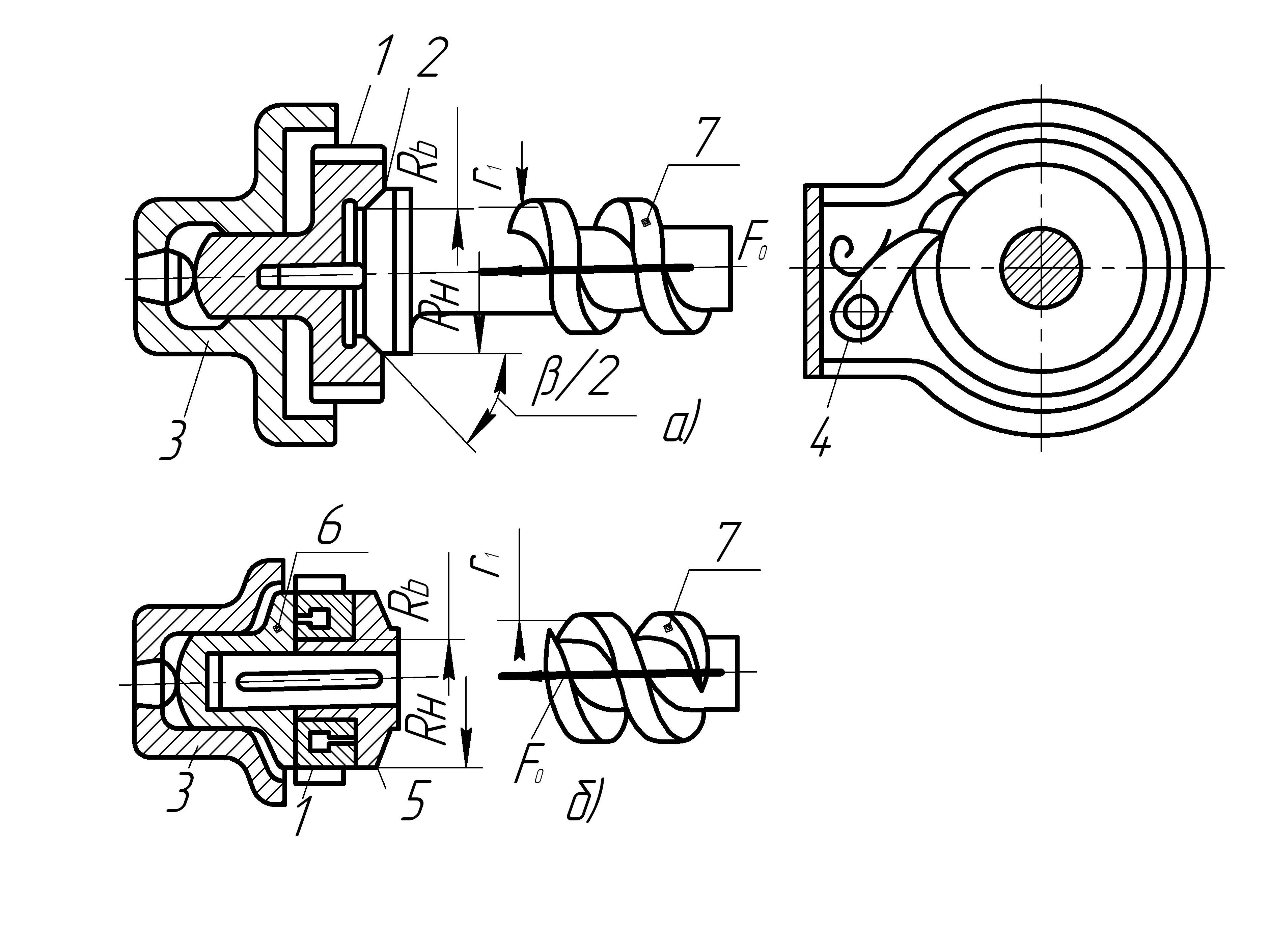
Рисунок 6.2 — Тормоза, замыкаемые под действием транспортируемого груза
а — конусный; б — дисковый.
1 — храповое колесо; 2 — конус; 3 — опоры; 4 — собачка; 5, 6 — диски; 7 — червяк
Величина усилия рабочего при опускании определяется следующим образом:
![]() ,
(6.1)
,
(6.1)
тогда
![]() , (6.2)
, (6.2)
где ![]() — статический момент, создаваемый
грузом на валу тормоза (червяка),
стремящийся опустить груз.
— статический момент, создаваемый
грузом на валу тормоза (червяка),
стремящийся опустить груз.
 , (6.3)
, (6.3)
где — вес груза, Н;
![]() —
диаметр грузовой звездочки, м;
—
диаметр грузовой звездочки, м;
![]() —
кратность полиспаста;
—
кратность полиспаста;
![]() —
передаточное число червячной передачи;
—
передаточное число червячной передачи;
![]() —
КПД полиспаста;
—
КПД полиспаста;
![]() —
КПД грузовой
звездочки;
—
КПД грузовой
звездочки;
![]() —
КПД червячной передачи.
—
КПД червячной передачи.
Таким образом,
при опускании груза необходимо преодолеть
разницу между моментом тормоза
![]() ,
удерживающим груз, и моментом статическим
от груза, стремящимся опустить груз. А
так как момент тормоза мало отличается
от момента статического, то остается
только преодолеть сравнительно небольшое
усилие. Нельзя допускать, чтобы к тяговой
цепи прикладывалось какое-либо усилие
при опускании груза (
,
удерживающим груз, и моментом статическим
от груза, стремящимся опустить груз. А
так как момент тормоза мало отличается
от момента статического, то остается
только преодолеть сравнительно небольшое
усилие. Нельзя допускать, чтобы к тяговой
цепи прикладывалось какое-либо усилие
при опускании груза (![]() = I).
Это означает, что груз может сам
произвольно опускать под действием
собственного веса, что может привести
к несчастному случаю. Поэтому запас
торможения
не может равняться единице (
≠ I),
а должен быть больше единицы.
= I).
Это означает, что груз может сам
произвольно опускать под действием
собственного веса, что может привести
к несчастному случаю. Поэтому запас
торможения
не может равняться единице (
≠ I),
а должен быть больше единицы.