

Моделирование аварийного режима работы сау
Подготовить имитационную модель, позволяющую за один расчет выполнить:
— моделирование процесса включения системы питания с получением установившегося режима;
— моделирование последующего переходного процесса, обусловленного потерей 50% величины э.д.с. Е0 с получением нового установившегося режима.
Воспользуемся имитационной моделью, приведённой в п. 10 с учётом внесённой в п. 11 корректировки. Значения коэффициентов Кр и Кd прежние (Кd = 0.1 и Кр = 10). Для имитации аварийного режима зададим потерю 50 % величины ЭДС основного источника в момент времени t = 1 с:
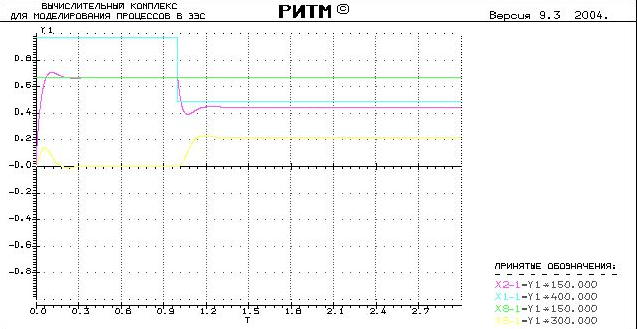
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Опытные характеристики:
1). Статизм
![]()
2). Перерегулирование
![]()
3). Длительность переходного процесса – 0.3 сек.
Отличие теоретических и опытных параметров составило не более 18 % (перерегулирование), менее 0.01 % (статизм) и не более 10 % (длительность переходного процесса).
Оптимизация сау
Провести поэтапную оптимизацию коэффициентов Кр и Кд с целью обеспечения допустимых значений показателей качества.
Технологические требования:
1). Статизм – не более 5 %
2). Перерегулирование – не более 30 %
3). Цепи регулирования системы должны быть низковольтными
Замечание: Так как изменение Кd повлечёт за собой необходимость внесения изменений и в другие звенья схемы (пропорциональное звено после уставки) более целесообразным является не меняя Кd = 0.1 изменять Кp.
Теоретически статизм можно рассчитать следующим образом:
![]()
Отсюда следует, что теоретически статизм меньше или равен 5 % при Кр ≥ 81 (Кd = 0.1) (в пределах области устойчивости). По данным условиям (Кd = 0.1 и Кр = 81) проведён опыт:
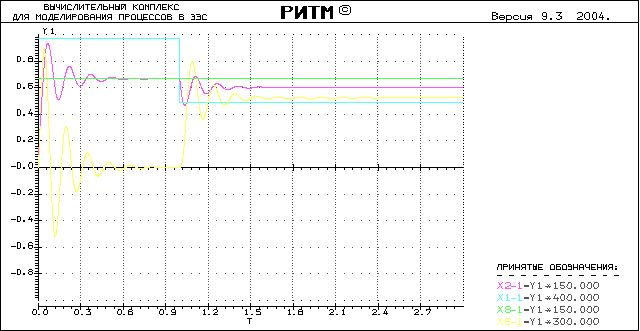
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Длительность переходного процесса 0.7 сек. по осциллограмме и теоретически:
![]()
По результатам опыта определим статизм:
![]()
Таким образом значение статизма попадает в допустимый интервал. Но значение перерегулирования превышает допустимое:
Опытное значение перерегулирования:
![]()
Теоретическое значение перерегулирования:
a0 = 287; a1 = 27.22*103; a2 = 82.96*104; a3 = 4.1152*106 Кр Кд+8*106
![]()
Для уменьшения величины перерегулирования нужно уменьшить μ, а для этого нужно уменьшать Кd*Кр. Из приведённой формулы для теоретического определения значения перерегулирования можно найти максимальный Кр, при котором будет обеспечена требуемая величина перерегулирования (не более 30%):

![]()
Для обеспечения значения перерегулирования не более 30 % необходимо, чтобы Кр ≤ 35 (при Кd = 0.1). По данным условиям (Кd = 0.1 и Кр = 35) проведён опыт:
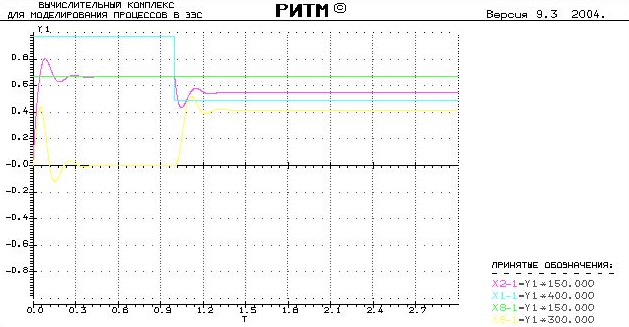
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Длительность переходного процесса 0.4 сек. по осциллограмме и теоретически:
![]()
По результатам опыта перерегулирование составило:
![]()
что является допустимым. Но статизм по результатам опыта равен:
![]()
Теоретически:
![]()
Для обеспечения требуемого статизма необходимо, чтобы Кd*Кр ≥ 8.1. Для обеспечения требуемой величины перерегулирования нужно, чтобы Кd*Кр ≤ 3.5. Очевидно, выполнение обоих требований в данной системе невозможно. Таким образом, для того чтобы обеспечить выполнение поставленных требований необходимо оптимизировать САУ.
В
Еуст
12
С
1
Е0
Еуст
13
15
Wпр


8
–

14
Хуст
Wик
ΔЕ



Е0
11
4
5
6
7
2
Wр
Wим
Wн
Хуст
Δх
Хр
Ер
х
Wпр


–
Ер
3
Wд
В связи с необходимостью сделать низковольтной компенсационную часть системы выбраны следующие параметры её составляющих:
Wпр: k = 0.1 (пропорциональное звено)
Wик: Т = 0.05 с; k = 10 (исполнительный механизм системы компенсационного управления – инерциальное звено 1-го порядка).
Еуст = 38.88 В
Таким образом в новой системе статизм должен быть равен нулю.
Данная схема была промоделирована (Кd = 0.1 и Кр = 35):
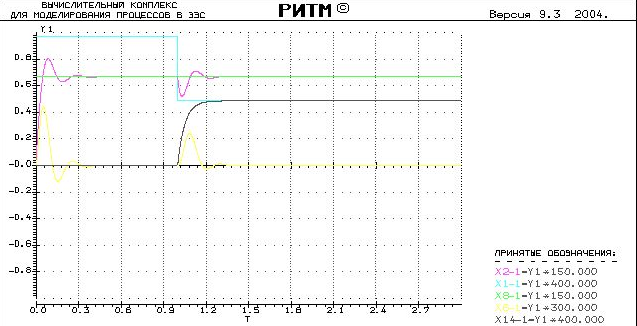
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма системы регулирования
Х8 – сигнал на выходе уставки
Х14 – сигнал на выходе исполнительного механизма системы компенсационного управления
По результатам опыта:
1). Статизм равен нулю (теоретически и в опыте)
2). Перерегулирование находится в пределах допустимых значений:
Теоретически:
a0 = 287; a1 = 27.22*103; a2 = 82.96*104; a3 = 4.1152*106 Кр Кд+8*106
3). Длительность переходного процесса 0.4 сек. по осциллограмме и теоретически: