

Подготовка имитационной модели сау.
Подготовить имитационную модель системы автоматического управления. Выполнить моделирования процесса включения системы питания при нулевых начальных условиях для заданных преподавателем величин коэффициентов Кd и Кр.
Схема имитационной модели:
1
BLT 103
101
4
BLT 135
5
BLT 133
6
BLT 133
7
BLT 135
401
501
601
701
8
BLT 103
801
301
2
BLT 133
3
BLT 089
9
BLT 014
10
BLT 015
701
201

х
1) BLT 103 – генератор кусочно-постоянного сигнала (Е0)
2) BLT 133 – инерционное звено I-ого порядка (нагрузка)
3) BLT 089 – пропорциональное звено (датчик)
4) BLT 135 – сумматор
5) BLT 133 – инерционное звено I-ого порядка (регулятор)
6 BLT 133 – инерционное звено I-ого порядка (исполнительный механизм)
7) BLT 135 – сумматор
8) BLT 103 – генератор кусочно-постоянного сигнала (Хуст)
9) BLT 014 – осциллограф
10) BLT 015 – табулятор
11) BLT 089 – пропорциональное звено (корректирующее звено)
По условию поставленной задачи необходимо, чтобы цепи регулирования системы были низковольтными, поэтому выбираем Kd = 0.1 и Кр = 10 (эта точка принадлежит области устойчивости)
Смоделируем процесс по схеме, приведённой выше при Кd = 0.1 и Кр = 10:

Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Данные результаты нас не устраивают, так как ЭДС регулируемого источника в установившемся режиме не равна нулю, а регулируемая величина не равна уставке. Следовательно, структурно-алгоритмическая схема нашей системы нуждается в корректировке.
Корректировка и расчёт основных параметров системы
Выбрать значения коэффициентов Кр и Кд из области устойчивости, которые в статическом режиме обеспечивают нулевую величину ЭДС Ер регулируемого источника. По результатам эксперимента рассчитать статизм и для выбранных значений коэффициентов Кр и Кд. Рассчитать теоретические значения указанных показателей.
Причиной некорректной работы системы, проиллюстрированной в п. 10, является несогласованность схемы сравнения регулируемой величины с уставкой: датчик ослабляет в 10 раз (Кd = 0.1) сигнал с выхода нагрузки, а уставка выдаёт сигнал той величины, которой должен быть сигнал на выходе нагрузки. В результате на исполнительный механизм поступает ложный сигнал рассогласования и система работает неправильно. Это можно исправить введением после уставки пропорционального звена, коэффициент передачи которого будет равен коэффициенту передачи датчика:
Е0
8
1
Хуст

Е0
11
4
5
6
7
2
Wр
Wим
Wн
Хуст
Δх
Хр
Ер
х
Wкр


–
3
Wд
Промоделируем процесс в скорректированной системе с теми же величинами Кd = 0.1 и
Кр = 10:
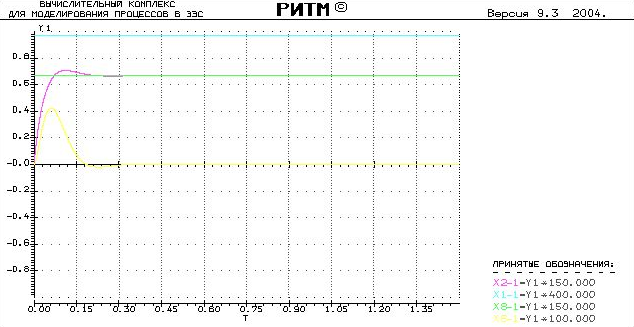
Х1 – сигнал на выходе основного источника
Х2 – сигнал на выходе нагрузки (регулируемая величина)
Х6 – сигнал на выходе исполнительного механизма
Х8 – сигнал на выходе уставки
Как видно по результатам проведённого опыта, мы смогли добиться нулевой ЭДС регулируемого источника и равенства регулируемой величины уставке в установившемся режиме.
Рассчитаем теоретические значения параметров системы:
1). Статизм
![]()
2). Перерегулирование
a0 = 287; a1 = 27.22*103; a2 = 82.96*104; a3 = 4.1152*106 Кр Кд+8*106

![]()
![]()
3). Длительность переходного процесса
![]()
Экспериментальные статизм, перерегулирование и длительность переходного процесса можно найти из опыта п. 12, в котором имитируется потеря 50 % ЭДС, т. е. изменение воздействия, что и требуется для опытного вычисления статизма.