

7. Объясните структурную схему простого управления рулевым электроприводом
Здесь представлены: РМ - рулевая машина; Н - насос переменной подачи (ГЗ - гидрозолотник в системе управления с насосом нерегулируемой подачи); ГУ – гидроусили
тель; СР - серводвигатель; У - электрический усилитель.
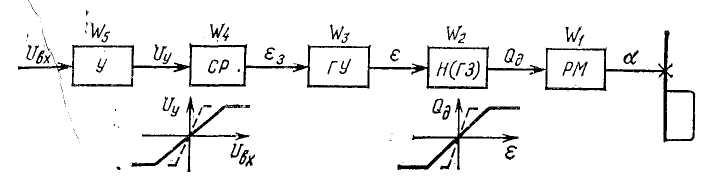
Рис. 10.17. Обобщенная разомкнутая система ручного управления РЭГ-приводом
При
простом управлении рулем контур
регулирования разомкнут. При
подаче управляющего напряжения U последовательно
отрабатывают все звенья и
начинается перекладка руля.
последовательно
отрабатывают все звенья и
начинается перекладка руля.
8. Объясните структурную схему следящего управления рулевым электроприводом
Система следящего управления может быть создана путем замыкания входа и выхода разомкнутой системы (рис. 10.18 ) через соответствующие преобразующие устройства.
Внутри следящего контура оказываются последовательно включенными два интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью.
Широко распространены схемы (рис. 10.18 ), где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.
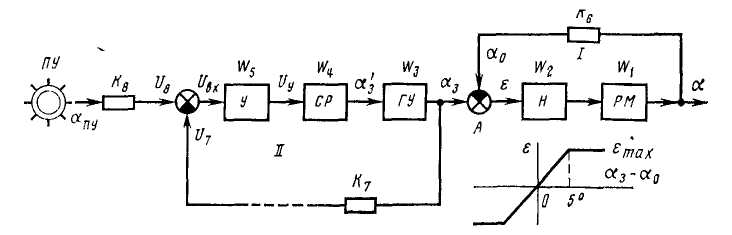
Рис. 10.18. Структурная схема следящего управления РЭГ-приводом с механической обратной связью
За последнее время появились новые структурные схемы управления рулем (АТР, АИСТ), где для обеспечения структурной устойчивости в следящем и автоматическом режимах обратной связью охватывается не рулевая машина, а серводвигатель (рис. 10.19 ).
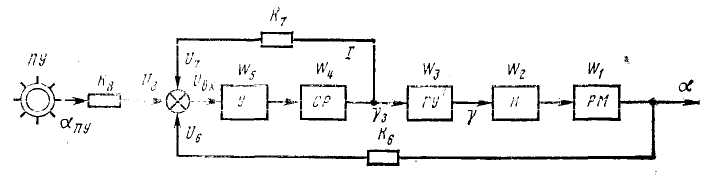
Рис. 10.19. Структурная схема управления РЭГ-приводом с электрической обратной связью.
9. Объясните систему автоматического управления рулевым электроприводом
Отклонение судна от заданного курса воспринимается гирокомпасом ГК (рис. 10.32 ), который через датчик повернет ротор сельсина-приемника курса СП.
Последний через необратимую передачу НП поворачивает вал механического дифференциала МД. На второй вал механического дифференциала от штурвала подает-
ся
заданное значение курса α .
На выходном (третьем)
валу МД
получается
разность между заданным и истинным
значениями курса, которая характеризуется
углом откло-
.
На выходном (третьем)
валу МД
получается
разность между заданным и истинным
значениями курса, которая характеризуется
углом откло-
нения от заданного курса α.
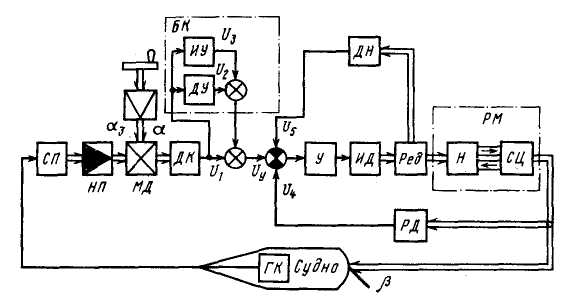
Рис. 10.32. Структурная схема авторулевого
Процесс управления судном для удержания его на заданном курсе можно представить следующим образом.
При отклонении судна от заданного курса выработанный авторулевым управля-
ющий сигнал поступает через усилитель на ИД. Последний приводит в движение управ-
ляющий
орган и датчик ДН,
вырабатывает
сигнал U ,
который вычитается
из управляю-
,
который вычитается
из управляю-
щего сигнала усилителя.
Когда при определенном смещении управляющего органа насоса значение сигна-
ла отрицательной обратной связи станет равным управляющему сигналу на входе уси-
лителя, разность напряжений станет равной нулю, а следовательно, и напряжение, подаваемое на ИД, тоже станет равным нулю.
Двигатель остановится, а управляющий орган насоса будет повернут на опреде-
ленный угол. Насос рулевой машины в соответствии с управляющим органом приведет в движение поршни СЦ рулевой машины, которые будут поворачивать руль.
При
повороте руля рулевой датчик РД
вырабатывает
сигнал U , который вычитается
из управляющего сигнала усилителя.
, который вычитается
из управляющего сигнала усилителя.
Поскольку в рассматриваемый момент разность сигналов на усилителе была рав-
на нулю, то под действием сигнала обратной связи РД усилитель будет вырабатывать напряжение противоположной фазы, ротор ИД будет вращаться в обратную сторону и перемещать управляющий орган насоса к нулевому положению.
При этом сигнал U обратной связи датчика ДН насоса будет соответственно уменьшаться.
Когда управляющий орган насоса вернется в нулевое положение, рулевая маши-
на прекратит движение, руль остановится в определенном положении, сигнал датчика ДН будет равен нулю, сигнал датчика РД будет равен по значению управляющему напря
жению U и противоположен по
знаку. Разность сигналов на входе
усилителя
опять бу-
и противоположен по
знаку. Разность сигналов на входе
усилителя
опять бу-
дет равна нулю.
Под действием момента, создаваемого рулем, судно начнет возвращаться на за-
данный курс и в связи с этим значение управляющего напряжения U уменьшается. Это приводит к нарушению равенства сигналов и под действием напряжения, определяемого полярностью сигнала U рулевого датчика, ИД начинает смещать регулирующий орган насоса в противоположную сторону.
В результате обеспечивается возврат руля в диаметральную плоскость, когда судно оказывается на заданном курсе.