

5. Математическое описание сау и сар. Моделирование сау и сар. Разбиение сау и сар на звенья. Статические и динамические характеристики звеньев сау и сар.
Моделирование САУ(САР)
Существует два подхода
Физический эксперимент
Математическое описание
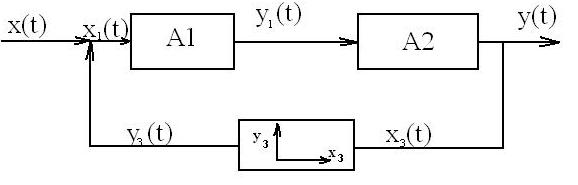
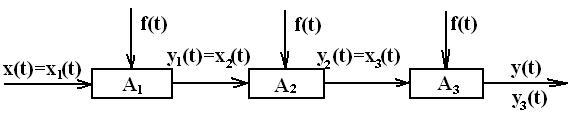
Разбиение САУ (САР) на звенья. Структурная схема.
Элементы направленного действия – элементы, у которых выходной сигнал не влияет на входной.
Звено – часть системы управления, которая осуществляет некоторое преобразование входного сигнала в выходной, являясь элементом направленного действия.
Алгоритм преобразования входного сигнала в выходной.
Элемент направленного действия.
Не обязательно обособленность звена.
Структурной схемой САУ (САР) называется схема, показывающая из каких звеньев она состоит и как эти звенья соединены между собой.
Если разбить систему управления на звенья, то математическое описание каждого звена может быть выполнено без учета его связи с другими звеньями.
![]()
![]()
Математическое описание всей САУ (САР) – совокупность составленных независимо друг от друга уравнений звеньев системы.
![]()
![]()
Статические характеристики звеньев.
Статистические характеристики звена – зависимость между выходной величиной y этого звена от входной x в установленном режиме при разных воздействиях на это звено.
![]()
Фиксируем входной сигнал х и фиксируем внешнее воздействие f и измеряем y.
![]()
![]()
![]()
- Статические характеристики звена.
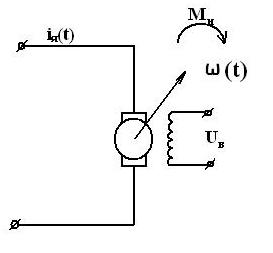
Фиксируем нагрузку, ток и угловую скорость и снимаем точку, затем меняем значения, все то же самое, и получаем вторую точку и т. д.
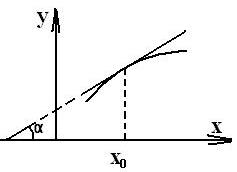
Коэффициент усиления звена:
![]()
Динамические характеристики звеньев.
Уравнение движения звена – уравнение(или система уравнений), определяющее изменение во времени выходной величины y по заданному измеренному во времени входной величине вектора x.
Существует два случая:
Меняется x, и меняется y.
Когда звено переходит из одного установившегося состояния в другое (x - фиксировано)
Линейная система.
Системы со сосредоточенными параметрами.
1) Линейные алгебраические уравнения – ЛСАУ.
2) Линейные дифференциальные уравнения – СДУ (линейных).
3) Интегральные системы – (содержат интегралы).

n>m
n>q
![]()
устоявшееся уравнение статики:
![]()
6. Математическое описание сау и сар. Моделирование сау и сар. Примеры составления дифференциальных уравнений звеньев сау и сар. Составление дифференциальных уравнений сау и сар в целом.
Моделирование САУ(САР)
Существует два подхода
Физический эксперимент
Математическое описание
Примеры составления дифференциальных уравнений звеньев САУ и САР.
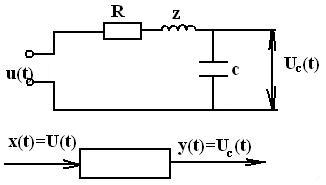
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Составление дифференциальных уравнений САУ и САР в целом.
![]()
![]()
![]()
7. Линейные системы автоматического управления и регулирования (лсау и лсар). Общие сведения. Передаточная функция лсау и лсар.
САУ или САР линейные, если уравнения динамики и следовательно статики линейны. Характерной чертой линейной системой автоматического управления и регулирования является применимость к ним принципа суперпозиции.
![]()
![]()
![]()
![]()
![]()
![]() где
где
![]() (t)
– общее решение однородного уравнения
(t)
– общее решение однородного уравнения
y(t) – частное решение неоднородного уравнения
Передаточная функция ЛСАУ.
x(t), y(t)-оригиналы.
![]()
![]()
Функция W(p)=Y(p)/X(p) – представляющая собой отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала в пространстве изображения при нулевых начальных данных - называется передаточной функцией ЛСАУ.
![]()
Нулевые начальные данные:


Предположим, что
![]()
Тогда:


![]()

Передаточная функция:
