

1. Основные понятия теория автоматического управления.
1948 г. – Кибернетика – наука об управлении в живой и неживой природе – Норберт Винер.
Впервые «кибернетика» как понятие появилось у Платона – наука об управлении в обществе(430г. до н. э.)
Первые автоматы – I век н. э.(описал Александрийский)
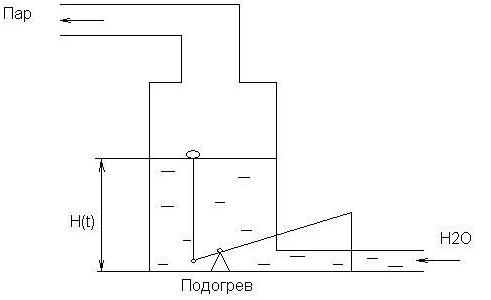
1775 г. – Ползунов – придумал приспособление для поддержание уровня жидкости в котле.
1782 г. – регулятор Уатта – приспособление для паровой машины – вне зависимости от нагрузки угловая скорость вращения вала должна оставаться постоянной.
Регулятор Ползунова (поддерживать Н0)
Константинов - регулятор для электричества.
Вышнеградский, Лепунов, Чебышев.
Автоматика – научная дисциплина – раздел кибернетики, изучающий методы анализа и синтеза САУ(САР) вне зависимости от их физической природы.
Одно из основных положений в кибернетике(автоматике) :
Управление – процесс переработки информации.
Понятие об управлении. Роль информации в управлении.
Управление – создание условий, обеспечивающих требуемое протекание процесса.
Управление направлено на достижение определенной цели.
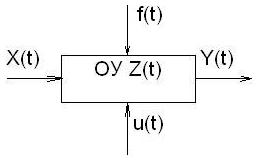
Объект управления(ОУ) – агрегат, машина, аппарат, комплекс машин и т. д., в которых протекает процесс, подлежащий управлению.
Процесс управления:
1. Получение информации о цели управления.
2. Получение информации о результатах управления.
3. Получение анализа полученной информации и выработка соответствующих управляющих решений.
4. Выполнение принятого решения.
Для этого необходимо иметь:
1. Источники информации о цели управления.
2. Источники информации о результатах управления.
3. Устройства для анализирования полученной информации и выработки управляющих решений.
4. Устройство, которое реализует принятое решение.
Управление бывает:
1. Автоматическое управление – если реализация всех элементов процесса управления (регулирования) осуществляется специально созданным техническим устройством без непосредственного участия человека.
Автоматические управляющие устройства - автоматически действующие устройства, предназначенные для реализации процесса управления(регулирования) – УУ(УР).
2. Ручное управление - если реализация всех элементов процесса управления(регулирования) осуществляется человеком.
3. Автоматизированное управление – управление осуществляется совместными действиями технических устройств и человека.
Автоматическое регулирование– поддержание постоянной или изменение по заданному закону некоторой величины, характеризующей этот процесс.
Автоматическое управление – автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
ОУ + УУ = САУ ОУ + УР = САР
Объект автоматического управления (регулирования)
![]()
z - вектор параметров, характеризующий состояние изделия, будем считать, что зависит только от времени и не зависит от пространства.
![]()
![]()
![]()
где n1≤n
y - вектор параметров состояния ОУ, по которым ведётся управление – это вектор управляемых параметров, а сами параметры – называются управляющими параметрами.
x(t) – совокупность всех внешних воздействий, которые могут повлиять на y(t).
![]()
![]()
u(t) - вектор управляющих воздействий (вырабатывает устройство управления/регулирования).
![]()
g - вектор задающих воздействий; определяет требуемый закон изменения вектора y - это цель управления.
![]()
gi описывает закон изменения yi.
f - вектор возмущающих воздействий.
![]()
fН(t) –(нагрузка) внешнее воздействие, приложенное к ОУ, независящее от устройства управления/регулирования и являющееся причиной изменения работы ОУ.
fП(t) - (помехи) внешнее воздействие, приложенное на отдельные части как ОУ, так и УУ, не содержащее информации необходимой для управления.
![]()
![]() Выделим
2 вектора: y(t)
и u(t).
Выделим
2 вектора: y(t)
и u(t).
Если вектор y(t) и вектор u(t) зависят от одного параметра(кроме времени), то этот ОУ называется одномерным.
Если вектор y(t) и вектор u(t) зависят от двух и более параметров, то этот ОУ называется многомерным.
Если между параметрами вектора y(t) и вектора u(t) нет функциональной связи, то этот ОУ является односвязным.
Если между параметрами вектора y(t) и вектора u(t) есть одна или более функциональная связь, то ОУ является многосвязным.
Правило или функциональная зависимость, в соответствии с которой УУ или УР формирует вектор управляющих воздействий, называется законом или алгоритмом управления.
![]()
Здесь параметры либо линейные, либо интегральные, либо описываются системой дифференциальных уравнений в полных дифференциалах.
Если параметры ОУ и всех векторов не зависят от пространственных координат, а зависят только от времени, то такой ОУ называется ОУ с сосредоточенными параметрами.
Если хотя бы один параметр зависит хотя бы от одной пространственной координаты, то такой ОУ называется ОУ с рассредоточенными параметрами.
Для статических условий y=F1(t) называется статической характеристикой объекта.
ОУ может быть:
1. Устойчивым «в малом»/«в большом»
2. Неустойчивым
3. Нейтральным
ОУ устойчив, если после кратковременного внешнего воздействия он с течением времени возвращается в исходное (близкое к нему) состояние.
Если ОУ не возвращается (а даже отдаляется) от исходного положения, то ОУ неустойчив.
Если ОУ переходит в другое состояние равновесия, то ОУ нейтрален.
Если кратковременное внешнее воздействие без ограничений, то устойчивость «в большом».
Если кратковременное внешнее воздействие ∆x с ограничением (∆x≤A), то устойчивость «в малом».
Задачи теории САУ(САР):
Анализ уже существующих систем
Синтез новых систем